

НАЦИОНАЛЬНЫЙ УНИВЕРСИТЕТ КОРАБЛЕСТРОЕНИЯ
имени адмирала Макарова
Кафедра морских технологий
ОБЩЕСУДОВЫЕ УСТРОЙСТВА И СИСТЕМЫ
Лабораторная работа №3
ЯКОРНОЕ УСТРОЙСТВО СУДНА.
ЭКСПЕРИМЕНТАЛЬНАЯ ОЦЕНКА уравнения цепной линии
2007
Л а б о р а т о р н а я р а б о т а № 3
Тема: Якорное устройство судна. Экспериментальная
оценка уравнения цепной линии.
Цель работы: Ознакомление с характеристиками и физическим явлением, используемом в якорном устройстве.
Задача: Определить основные параметры формы тяжелой гибкой нити (усилия натяжения Т и углы провисания α якорной цепи от собственного веса Q в точках ее крепления: клюзовой К и якорной Я) и сравнить их с теоретическим решением, полученным на основе уравнения цепной линии.
Краткая теория:
Якорное устройство состоит из якоря, якорной цепи, приводного механизма (шпиля или брашпиля), якорного клюза, прсипособлений для крепления (стопор) и аварийной отдачи (жвакагалс с глаголь-гаком и т.п.) и служащие для закрепления судна за донный грунт водоема как при рабочих так и аваприйных его стоянках на открытых акваториях, защищенных и не защищенных береговыми сосоружениями.
Одним из основных конструктивных элементов якорного устройства, передающего усилие держащей силы от якоря, закрепленного на грунте, через якорный клюз на судно является якорная цепь, - металлическая тяжелая гибкая нить, состоящая из отдельных, шарнирно соединенных между собой, овальных элементов Т(Q) (звеньев), способная воспринимать только растягивающее усилие, возникающие под действием её собственных сил веса Q , внешних сил натяжения Т(Q) (сопротивления судна R ) и Т(Rволн) от рывков Rволн (при волнении).
При стоянке судна на якоре вытравленная за борт и закрепленная в точках подвеса (клюзовой К и якорной Я) якорь-цепь провисает по сложной кривой в виде параболы не симметричной относительно этих точек, форму которой можно описать уравнением цепной линии.
При свободном провисании без касания о грунт якорь-цепь подвержена только усилиям растяжения Т(Q) от собственного веса Q в характерных точках цепной линии – клюзовой К и якорной Я точках крепления цепи (соответственно на клюзе и якоре) и самой низшей точки цепи, точке М. (см. рис 3.2). При этом указанные усилия (их взаимное перераспределение) существенно зависят от угла α провисания якорь-цепи в точках К и Я.
Усилия Т(Q) должны учитываться при расчете суммарных усилий в якорь-цепи (ТΣ= Т(Q)+ Т(R)+Т(Rволн) ) при стоянке судна на якоре, а также всего якорного устройства в целом, так как от данных параметров зависит надежность якорного устройства (держащая сила якоря и якорь-цепи, Тяк+Тяк.ц.=Т∑ потребная мощность приводных механизмов N, достаточная прочность узлов крепления и т.п.) и надежность самой якорной стоянки судна [1].
Примечание: для увеличения держащей силы системы якорь – якорь-цепь на практике вытравливается дополнительная длина якорь-цепи, которая образует горизонтальный участок в нижней точке её провисания (лежащий на грунте), тем самым значительно увеличивая держащую силу системы за счет силы трения покоя цепи о грунт (и её веса Q). Кроме того, горизонтальный участок якорь-цепи играет основную и главную роль в «игре» (амортизации усилия Т(Rволн) её рывков) при стоянке судна на волнении.
Таким образом, в основе работы якорного устройства, как устройства крепления судна за донный грунт водоема, используются общеизвестные физические явления, такие как:
1 -гибкость (шарнирность) тяжелой нити (якорь-цепи), воспринимающей только растягивающие усилия, описываемые уравнением цепной линии;
2 -сила сцепления якоря с грунтом, обусловленная глубиной зарывания лап якоря в грунт;
3 -сила трения покоя - сила сцепления тяжелой нити с грунтом под действием собственной силы тяжести Q нити (якорь-цепи).
Примечание: в данной лабораторной работе рассматривается только первое физическое явление.
Взаимозависимость усилий Т и углов α описывается уравнением цепной линии в виде [2]:

где
α |
- угол провисания якорь цепи в данной характерной точке (М, К, Я), град; |
q = Q/l |
– погонная масса (погонный вес) якорь-цепи, кг/м; |
Q |
– масса (вес) якорь-цепи, кг; |
l |
– длина якорь-цепи, м; |
Z |
– аппликата точек (К и Я) подвеса якорь-цепи относительно самой низшей её точки М, м; |
T(Q) |
– усилие натяжения якорь-цепи от её собственного веса Q, кг. |
Ход работы:
Оборудование (см.рис.3.1 и 3.2):
стенд, моделирующий стоянку судна на якоре при свободном (без касания о грунт) провисании якорь-цепи и нагруженной только растягивающими усилиями Т(Q) от её собственного веса Q;
исследуемая якорь-цепь калибром К, массой (весом) Q и длиной l;
штангенциркуль для замера калибра К якорь-цепи;
динамометры типа ДПУ – 002-2 для замера усилий Т(Q) в якорь-цепи;
линейка для замера длины участков а, в, Zправ , Zлев , lправ , lлев якорь-цепи;
транспортир для замера углов αправ , αлев провисания якорь-цепи в точках её крепления;
мелок для отметки самой низшей точки М якорь-цепи.
1 2 3 4 5 6 7 8
12 11 10 9
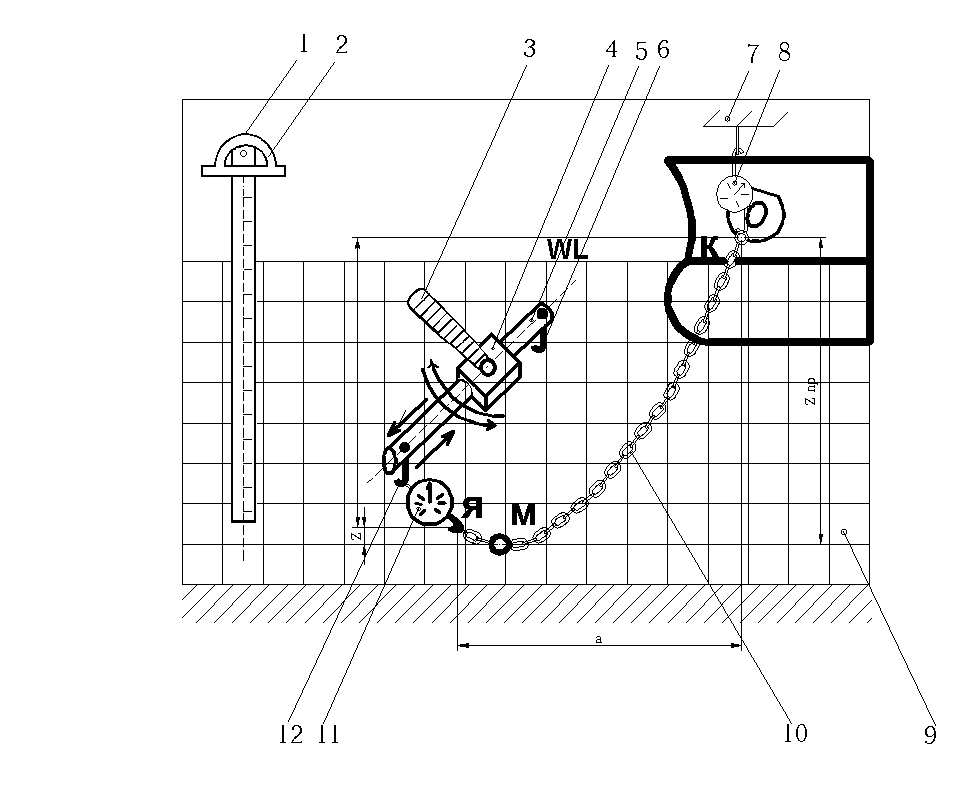
Рис.3.1 Схема экспериментальной установки
1-линейка; 2-транспортир; 3-рукояка фиксации штанги; 4-струбцина крепления штанги; 5-подвижная регулируемая штанга с крючками 6, 12 для подвески нижней (якорной) ветви якорь-цепи; 7-узел крепления верхний (клюзовой) ветви якорь-цепи; 8 – клюзовый динамометр; 9 – полотно стенда с координатной сеткой; 10 – исследуемая якорь-цепь; 11 – якорный динамометр; К – клюзовая точка подвеса якорь-цепи; Я – якорная точка крепления якорь-цепи; М – низшая точка провисания якорь-цепи; а – расстояние между точками К и Я по горизонтали; в – расстояние между точками К и Я по вертикали; Ζправ, Ζлев – аппликаты точек К и Я относительно точки М.

Рис. 3.2 Расчетная схема эксперимента
Точка К –клюзовая (правя верхняя) точка подвеса якорь-цепи; Точка Я – якорная (левая нижняя) точка крепления якорь-цепи; Точка М – низшая точка провисания якорь-цепи; а, м – расстояние между точками К и Я по горизонатли; в , м – расстояние между точками К и Я по вертикали; Zправ , Zлев , м – аппликаты точек К и Я относительно точки М; Zправ= Zлев+в, м; αправ , αлев, град – углы провисания (углы между касательными к якорь-цепи в точках К и Я и горизонталью) соотвотственно правой (клюзовой) и левой (якорной) ветвей якорь-цепи; Q, кг – масса (вес) якорь-цепи; ТМ(прав), ТМ(лев), Т прав (Q), Тлев(Q), кг – растягивающие усилия в соответствующих точках М, К и Я якорь-цепи от её собственной силы веса Q.
Техника выполнения эксперимента
1. Выбрать якорь-цепь для исследования согласно варианту табл.3.1.
Задаваемые параметры якорь-цепи Табл.3.1
№ варианта |
Якорь-цепь |
|||||
№1 |
№2 |
№3 |
||||
Расстояния между клюзовой К и якорной Я точками подвески якорь-цепи |
||||||
По горизонтали а,м |
По вертикали в,м |
По горизонтали а,м |
По вертикали в,м |
По горизонтали а,м |
По вертикали в,м |
|
1 |
0,850 |
0,400 |
0,600 |
0,100 |
0,850 |
0,800 |
2 |
0,850 |
0,350 |
0,600 |
0,200 |
0,850 |
0,700 |
3 |
0,850 |
0,300 |
0,600 |
0,250 |
0,850 |
0,600 |
4 |
0,850 |
0,250 |
0,600 |
0,300 |
0,850 |
0,500 |
5 |
0,850 |
0,200 |
0,700 |
0,100 |
0,850 |
0,400 |
6 |
0,850 |
0,150 |
0,700 |
0,150 |
0,850 |
0,300 |
7 |
0,850 |
0,100 |
0,700 |
0,200 |
0,850 |
0,200 |
8 |
0,850 |
0,050 |
0,700 |
0,250 |
0,850 |
0,100 |
9 |
0,800 |
0,350 |
0,700 |
0,300 |
0,800 |
0,700 |
10 |
0,800 |
0,300 |
0,700 |
0,350 |
0,800 |
0,600 |
11 |
0,800 |
0,250 |
0,800 |
0,050 |
0,800 |
0,500 |
12 |
0,800 |
0,200 |
0,800 |
0,100 |
0,800 |
0,400 |
13 |
0,800 |
0,150 |
0,800 |
0,150 |
0,800 |
0,300 |
14 |
0,800 |
0,100 |
0,800 |
0,200 |
0,800 |
0,200 |
15 |
0,800 |
0,050 |
0,800 |
0,250 |
0,800 |
0,100 |
16 |
0,700 |
0,350 |
0,800 |
0,300 |
0,700 |
0,700 |
17 |
0,700 |
0,300 |
0,800 |
0,350 |
0,700 |
0,600 |
18 |
0,700 |
0,250 |
0,850 |
0,050 |
0,700 |
0,500 |
19 |
0,700 |
0,200 |
0,850 |
0,100 |
0,700 |
0,400 |
20 |
0,700 |
0,150 |
0,850 |
0,150 |
0,700 |
0,300 |
21 |
0,700 |
0,100 |
0,850 |
0,200 |
0,700 |
0,200 |
22 |
0,600 |
0,300 |
0,850 |
0,250 |
0,600 |
0,600 |
23 |
0,600 |
0,250 |
0,850 |
0,300 |
0,600 |
0,500 |
24 |
0,600 |
0,200 |
0,850 |
0,350 |
0,600 |
0,400 |
25 |
0,600 |
0,100 |
0,850 |
0,400 |
0,600 |
0,100 |
Примечание: в табл.3.1 задано 25х3=75 вариантов исследования, из них 3 варианта якорь-цепи и 25 вариантов координат а и в каждой из них. Например, вариант 1.23 означает: первая цифра 1 – № якорь-цепи, вторая цифра после точки, 23 – № варианта расстояний (№ по списку): а = 0.600 м, в = 0.250 м.