

2. Теоретические сведения
2.1. Классификация динамических звеньев
Элементы, из которых составлены различные системы автоматического регулирования называются звеньями. Они могут значительно различаться как по физической природе процессов, происходящих в них, так и по своему конструктивному выполнению. Если работа звеньев описывается одинаковыми дифференциальными уравнениями, то их к одному типу. При теоретическом исследовании САР последнее положение является наиболее существенным. Поэтому в теории автоматического регулирования принято различать элементы по математическому описанию и, в случае совпадения последнего, считать их принадлежащими одному типу так называемых динамических звеньев, из которых составляются структурные схемы САР.
Все звенья по виду своих статических характеристик (т.е. функциональной связи выходной и входной величин после окончания переходных процессов) делятся в основном на три класса: позиционные (или статические), интегрирующие и дифференцирующие.
Дифференциальные уравнения и передаточные функции звеньев САР исследуемых в работе приведены в табл. 1.
Таблица 1. Дифференциальные уравнения и передаточные
функции звеньев САР
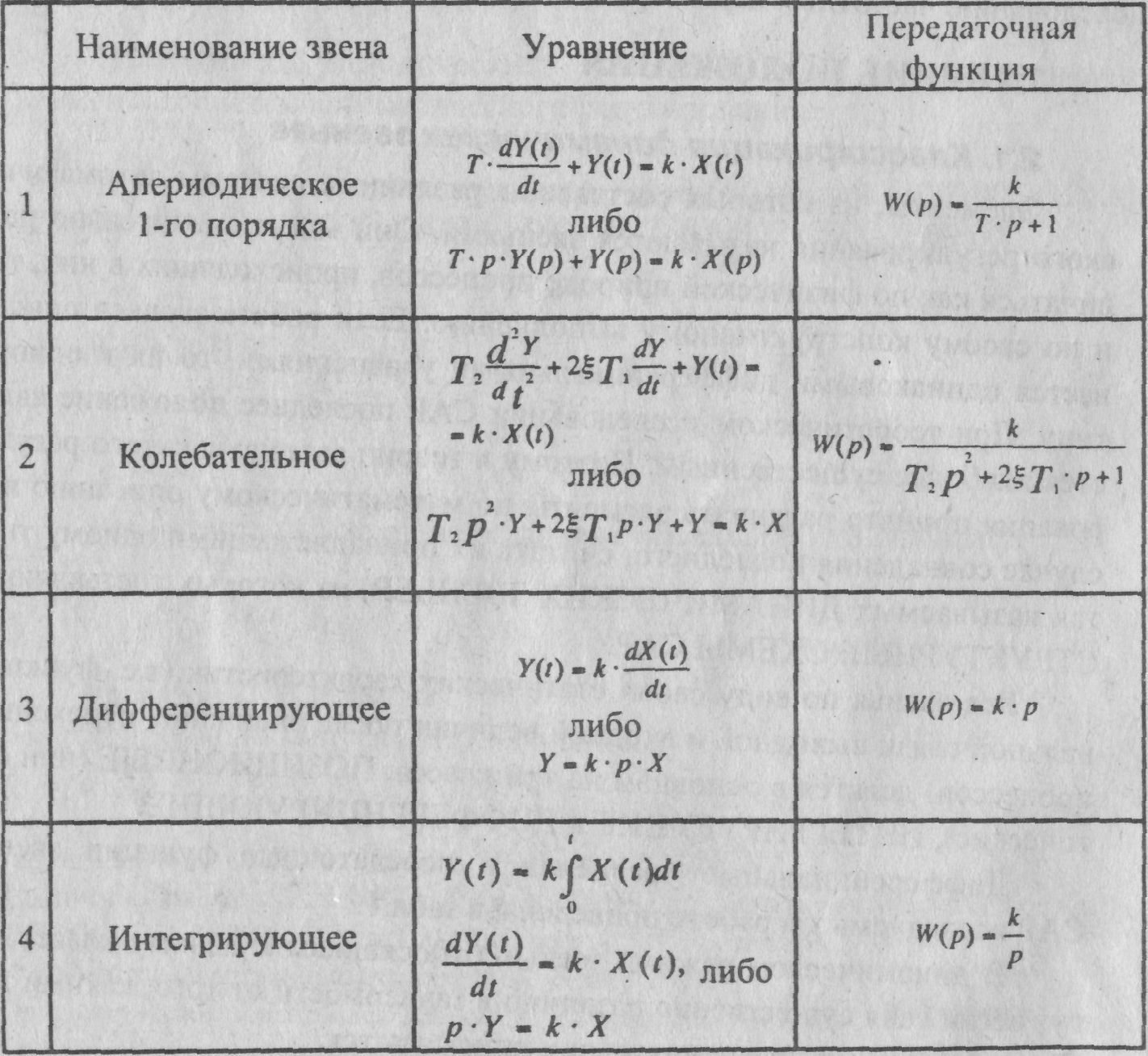
В динамическом режиме звенья, относящиеся к одному классу, могут вести себя существенно различно в зависимости от того, какими дифференциальными уравнениями они описываются.
Исследование звеньев можно осуществлять и на физических моделях в электрических цепях, если математическое описание работы звена и модели совпадает по форме.
В лабораторной работе исследуются четыре звена: позиционные -апериодическое первого порядка и колебательное; интегрирующее первого порядка без замедления и дифференцирующее первого порядка с замедлением. Указанные звенья выполнены в виде простейших электрических цепей, схемы которых показаны на рис.1. Входной величиной X(t) является напряжение UBX, а выходной Y(t) - напряжение UВЫХ.
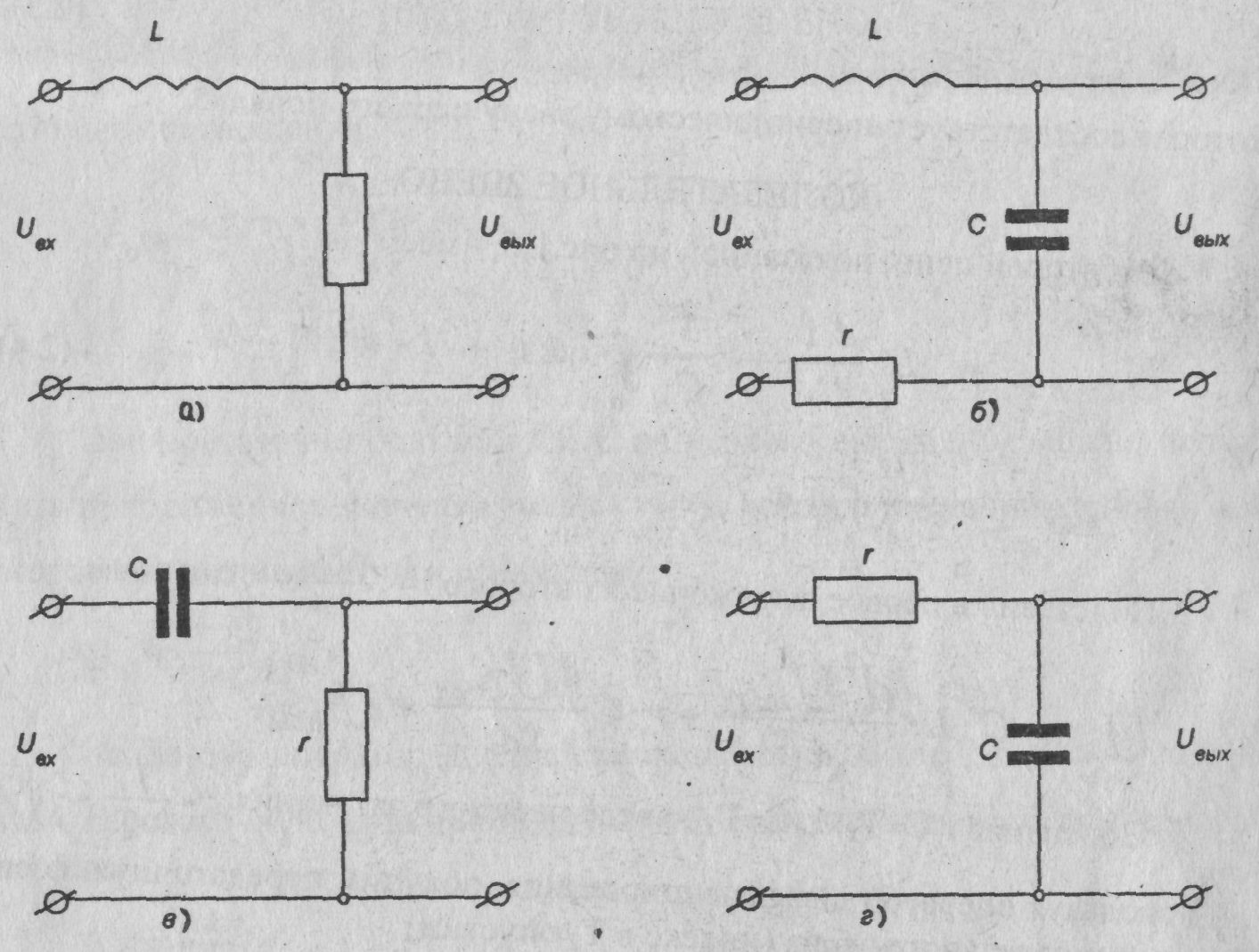
Рис. 1. Принципиальные схемы электрических моделей звеньев
Апериодическое звено 1-го порядка. Действительно, для первой цепи (рис.1,а) можно записать:
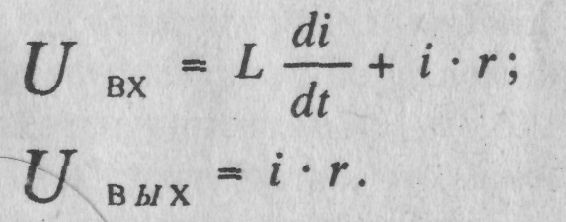 (2.1)
(2.1)
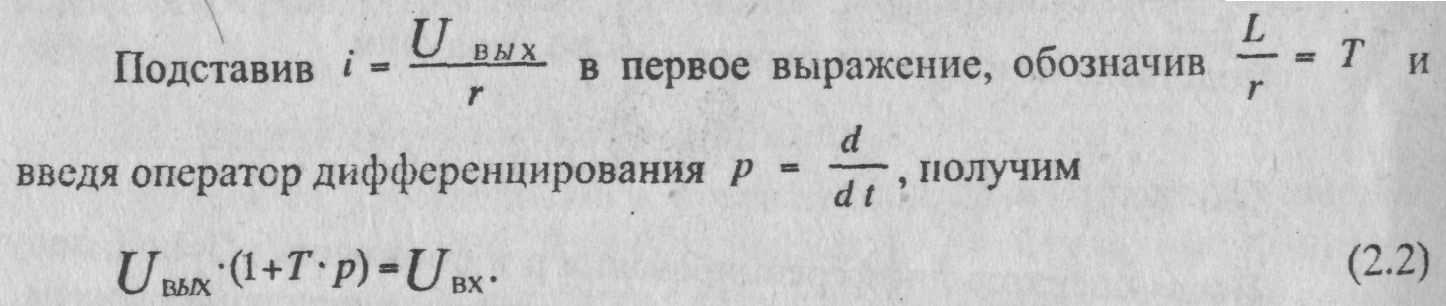
Из последнего выражения запишем передаточную функцию
 (2.3)
(2.3)
которая соответствует апериодическому звену первого порядка.
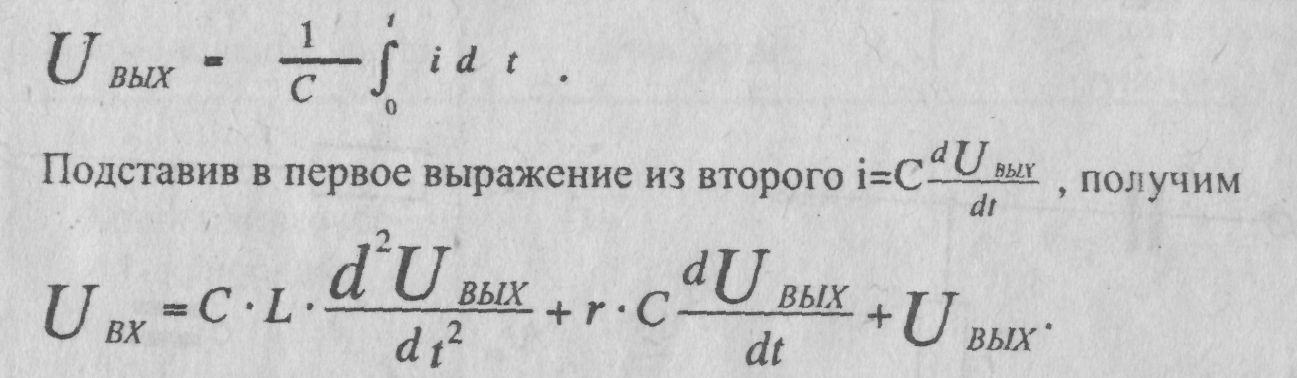
Колебательное звено. Для второй цепи, показанной на рис. 1,б, имеем
 (2.4)
(2.4)

и используя оператор дифференцирования, получим передаточную функцию колебательного звена (индекс в Т2 опустим)
 (2.5)
(2.5)
Дифференцирующее звено. Для цепи (рис.1,в) можно записать следующие выражения:
 (2.6)
(2.6)
Введя оператор дифференцирования р и обозначив rC=k=T получаем передаточную функцию дифференцирующего звена с замедлением
W3(p)=kp. (2.7)
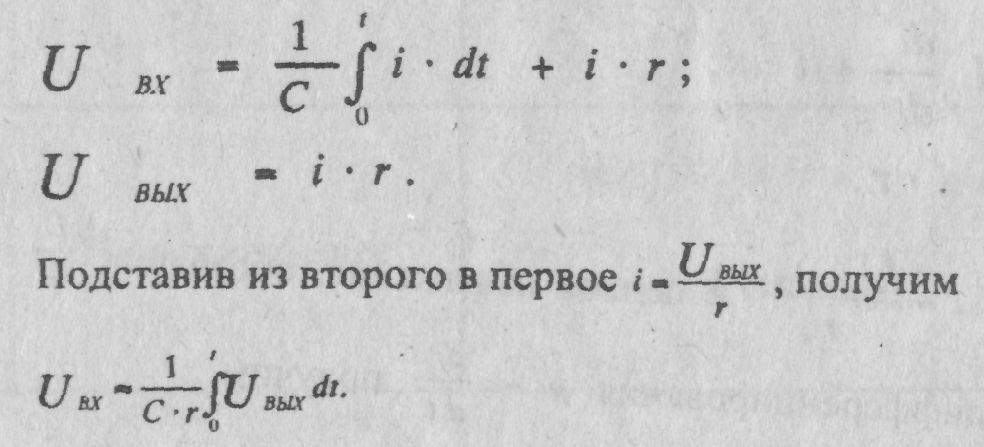
Интегрирующее звено. Для последней цепи, изображенной на рис.1,г, справедливы следующие соотношения:
 (2.8)
(2.8)
При достаточно больших г и С из первого выражения можно полу-
![]() второе уравнение
дает нам следующее:
второе уравнение
дает нам следующее:
Используя оператор
дифференцирования и обозначив
получаем передаточную функцию идеального интегрирующего звена первого порядка
 (2.9)
(2.9)
В общем случае динамические свойства звеньев САР могут быть описаны либо с помощью дифференциальных уравнений, либо посредством графических характеристик. В теории автоматического регулирования (ТАР) применяются два типа характеристик: временные и частотные.
Удобство их использования заключается в том, что они могут быть построены не только по уравнению (с которым связаны однозначно), но и сняты экспериментально, что очень ценно для практики. Важным является и то обстоятельство, что можно решить обратную задачу - по экспериментальным характеристикам составить дифференциальное уравнение звена.