

Исследования атмосферы
Исследования атмосферы стационарными лидарами остаётся наиболее публичной отраслью применения технологии. В мире развёрнуто несколько постоянно действующих исследовательских сетей (межгосударственных и университетских), наблюдающих за атмосферными явлениями.
Измерение скорости и направления воздушных потоков.
Теоретическое обоснование применения наземного доплеровского лидара для таких измерений было дано ещё в 1980-е годы. Принцип действия основан на использовании эффекта Доплера, согласно которому, частота принятого сигнала, отражённого от цели может отличаться от частоты излучённого сигнала и разница зависит от соотношения скоростей объектов относительно друг друга. В 2001 Alcatel предложил размещение лидаров на борту спутников, так, что «созвездие» спутников на орбите способно отслеживать движение воздушных масс в рамках целого континента, а в потенциале — на Земле в целом.
Измерение температуры атмосферы. Разработано и реализовано на практике несколько основных методов измерения профилей температуры.
В первом методе используется резонансное рассеяние на атомах щелочных металлов, в частности, натрия, калия, а также железа. Облака атомов металлов находятся на высоте 85 — 100 км. Температура измеряется по доплеровскому уширению резонансных линий с помощью зондирования узкополосным подстраиваемым лазером. Первые измерения были осуществлены с помощью искусственных натриевых облаков, забрасываемых в атмосферу ракетами. Несмотря на то, что метод ограничен диапазоном высот, на которых присутствуют атомы металла, рассеянный сигнал оказывается относительно большим, и это дает возможность измерять температуру с точностью до 1.5 ˚К.
Второй метод — метод рэлеевского рассеяния (Rayleigh lidar), основан на нерезонансном рассеянии света на молекулах воздуха. Впервые он был применен в 1953 году в опытах с прожекторным зондированием атмосферы. Суть метода заключается в следующем. Если отсутствует аэрозольное рассеяние, то мощность обратно рассеянного сигнала прямо пропорциональна плотности воздуха, из которой можно расcчитать температуру. Разрежение воздуха с высотой позволяет использовать метод рэлеевского рассеяния на высотах не более 90 км. Нижняя граница высоты измерения (около 20-30 км) обусловлена присутствием в граничном слое большого количества аэрозоля, который значительно увеличивает рассеяние, но практически не влияет на плотность воздуха.
Третий метод основан на вращательном рамановском (комбинационном) рассеянии молекулами воздуха (Raman lidar). Когда температура увеличивается, интенсивность переходов с большими квантовыми числами возрастает, в то время как интенсивность линий вращательного рамановского спектра, соответствующих маленьким квантовым числам, уменьшается. Переходы с большими квантовыми числами соответствуют линиям рамановского спектра, расположенным дальше от центральной частоты. Температура определяется при использовании измерений в двух областях спектра с различной температурной зависимостью. Максимальная высота зондирования составляет около 30 км, погрешность измерения менее 1 ˚К до высоты 10 км[19]. Так как в приемнике линия упругого рассеяния подавляется, то измерения можно проводить и в присутствии значительных концентраций аэрозолей.
Раннее оповещение о лесных пожарах.
Лидар, размещённый на возвышенности (на холме или на мачте) и сканирующий горизонт, способен различать аномалии в воздухе, порождённые очагами пожаров. В отличие от пассивных инфракрасных систем, распознающих только тепловые аномалии, лидар выявляет дымы по аномалиям, порождаемым частицами горения, изменению химического состава и прозрачности воздуха и т. п.
Исследования Земли
Вместо установки лидара на земле, где принимаемый отражённый свет будет зашумлён из-за рассеяния в загрязнённых, нижних слоях атмосферы, «атмосферный» лидар может быть поднят в воздух или на орбиту, что существенно улучшает соотношение сигнал-шум и эффективный радиус действия системы. Первый полноценный орбитальный лидар был выведен на орбиту NASA в декабре 1994 года в рамках программы LITE (Lidar In-Space Technology Experiment). Двухтонный лидар LITE с метровым зеркальным телескопом, поднятый на высоту 260 км, «рисовал» на земле размытое пятно диаметром 300 м, что было явно недостаточно для эффективного отображения рельефа, и был исключительно «атмосферным».
Космическая геодезия.
Сканируют рельеф земной поверхности с приемлемой разрешающей способностью.
Авиационная геодезия.
Национальная
океанографическая служба США (NOAA)
систематически применяе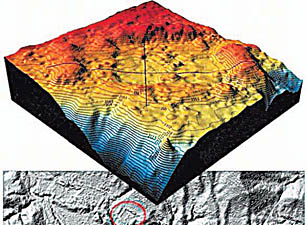 т
авиационные лидары для топографической
съёмки морского побережья.
т
авиационные лидары для топографической
съёмки морского побережья.
Особое направление, применяемое на практике в сейсмоопасных районах США — дифференциальное измерение высот с целью выявления локальных подвижек земных масс в районе разломов. Ещё в 1996 с помощью лидара была открыта неизвестная ранее зона разлома возле Сиэтла.
Совсем не давно с помощью подобного лидара группе ученых из Хьюстонского университета возможно, удалось найти в джунглях Гондураса легендарный Золотой город.
Рисунок 139 Применение прежде засекреченной военными технологию лазерного картографирования.