

Лекция 4. Интегрирование дифференциальных уравнений невозмущенных движений исз. Интеграл площадей.
Система дифференциальных уравнений (2) является системой 6ого порядка, поэтому должны существовать 6 независимых интегралов, полностью определяющих движение спутника, т.е. вид и форму орбиты; ее положение в пространстве и закон движения по ней. Каждый интеграл содержит одну произвольную постоянную, поэтому 6 произвольных постоянных полностью определяют невозмущенное движение ИСЗ.
Интегрируя (2) методом разделения переменных, получим:
Три интеграла площадей; интеграл энергии; интеграл орбиты и динамический интеграл.
Интеграл площадей.
Запишем дифференциальные уравнения невозмущенного движения: Умножим по схеме и сложим, тогда:
-y
+z
+x
-z
-x
+y
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
В каждом из полученных уравнений заменим одну производную через дифференциал, тогда получим:
![]() интегрируя эту
систему найдем:
интегрируя эту
систему найдем:
![]()
![]() умножим по схеме, сложим
умножим по схеме, сложим
![]()
![]() и получим:
и получим:
![]()
 (3)
(3)
Это значит, что невозмущенная орбита ИСЗ лежит в плоскости, проходящей через центр масс Земли и называется орбитальной плоскостью.
Если в орбитальной плоскости выбрать произвольную систему плоских прямоугольных координат ξ и η, то по аналогам с пространственной системой по осям ξ и η, получим:
![]() ξ умножим по схеме, сложим
ξ умножим по схеме, сложим
![]() -η и найдем:
-η и найдем:
![]()
![]() Заменим
одну производную через
Заменим
одну производную через
![]() дифференциал,
тогда:
дифференциал,
тогда:
![]() после интегрирования найдем:
после интегрирования найдем:
![]() (4)
(4)
В данной плоской
системе координат рассмотрим возможность
определения
![]() и
и
![]() через
полярные координаты
через
полярные координаты
![]() и
φ, тогда
и
φ, тогда
![]() ,
,
Дифференцируя,
найдем:
![]() ;
;
![]() (5)
(5)
Подставляя (5) в (4) получим:
![]()
![]() Откуда:
Откуда:
![]() или
или
![]() (6)
(6)
Если в этом уравнении взять производную по времени, то получим удвоенную секториальную скорость, т.е. удвоенную площадь, описываемую радиус-вектором τ в единицу времени.
Таким образом, секториальная скорость есть величина постоянная и тем самым строго доказан второй закон Кеплера. Поэтому первые 3 интеграла называются интегралами площадей.
Лекция 5. Элементы орбиты исз.
При решении практических задач, связанных с использованием ИСЗ, требуется знать положение спутника в пространстве в произвольный момент времени. Для этого, из решения 3х дифференциальных уравнений второго порядка, необходимо найти x,y,z-искомые координаты спутника, которые выражаются функциями от независимого переменного t и 6ти произвольных постоянных (параметров орбиты).
В связи с этим, рассмотрим движение спутника по эллиптической орбите, т.е. установим 6 параметров, из которых 5 определяют пространственное положение орбиты, а 6ой определяет мгновенное положение ИСЗ в пространстве и является функцией времени.
Для этого построим эллиптическую орбиту так, чтобы один из фокусов эллипса совпадал с точкой О (центр масс Земли).
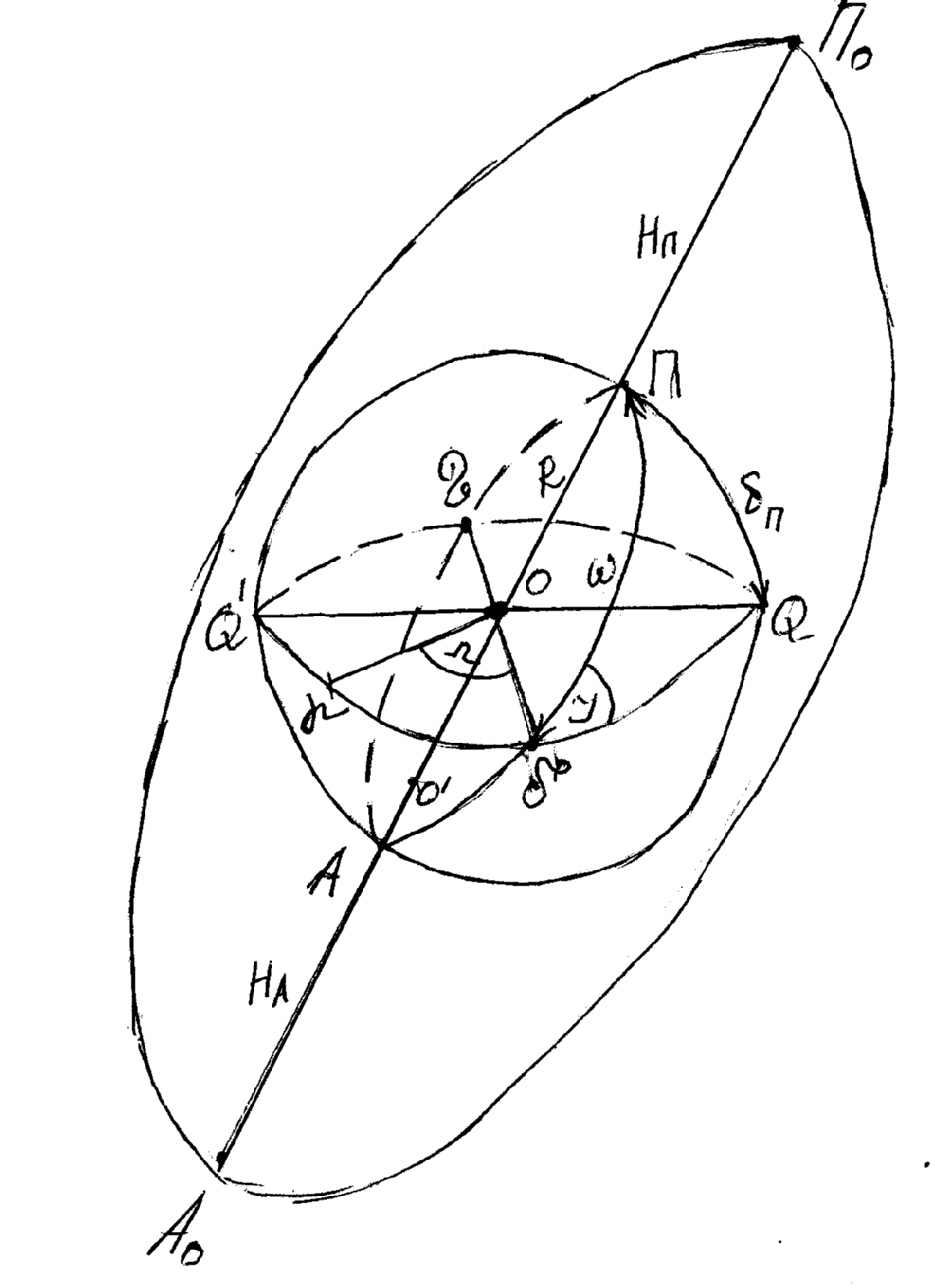
R-радиус сферы (ср.радиус Земли)
О’- центр эллиптической орбиты
П0-перигей, А0-апогей
П- перицентр (проекция П0 на сферу),А-Апоцентр
QQ’-экватор,
![]() -Восходящий узел
орбиты
-Восходящий узел
орбиты
![]() -Нисходящий узел
орбиты
-Нисходящий узел
орбиты
![]() - Линия узлов
- Линия узлов
АП-линия АПСИД, OO’=c=a-ea=a(1-e)
Элементы орбиты:
Наклонение орбиты J-угол между плоскостью орбиты и плоскостью экватора;
Долгота восходящего узла- угол в плоскости экватора от направления в точку весеннего равноденствия (γ ) до линии узлов.
Эти 2 параметра определяют положение орбиты ИСЗ в пространстве.
Большая полуось а орбиты- определяет размер орбиты.
Эксцентриситет е орбиты – определяет форму орбиты
Склонение перицентра δп (дуга сферы ПQ) или аргумент перигея ω (угол в плоскости орбиты от линии узлов до линии АПСИД). Параметр δп (ω) определяет расположение (ориентирование) эллипса в плоскости орбиты.
Момент прохождения ИСЗ через перигей или узел орбиты- t0
Из чертежа следует:
ОП0=R+ Hп =a-c=a-ae=a(1-e)
OA0= R+Ha= a+c=a+ae=a(1+e), откуда
Hп=a(1-e)-R
Ha=a(1+e)-R (1)
Если в системе (1) сложить правые и левые части, то получим:
Ha
+
Hп=2а-2R;
![]() (2)
(2)
Если в системе (1) не сложить, а вычесть, то найдем:
Ha
+
Hп=2ае;
![]() (3)
(3)