

2.5 Аналитический способ определения равнодействующей системы сходящихся сил. Условия равновесия
Каждую силу системы сходящихся сил можно разложить на составляющие по осям прямоугольной декартовой системы координат:
![]() ,
(2.7)
,
(2.7)
где
![]() - орты осей X, Y,
Z.
- орты осей X, Y,
Z.
Разложив каждую
силу в формуле (2.7) и вынося орты
![]() за
знаки сумм, получим:
за
знаки сумм, получим:
 (2.8)
(2.8)
Аналогично можно разложить и равнодействующую:
![]() . (2.9)
. (2.9)
Приравнивая выражения (2.9) и (2.8), получим, что

 . (2.10)
. (2.10)
Определив проекции равнодействующей, можно найти ее модуль
![]() , (2.11)
, (2.11)
а также косинусы углов между вектором силы и осями координат:
![]() . (2.12)
. (2.12)
Эти косинусы связаны между собой соотношением
![]() .
.
Косинусы углов между некоторым вектором и осями координат называют также направляющими косинусами данного вектора.
Для системы взаимно
уравновешенных сил
![]() ,
а значит,
,
а значит,
![]() ,
отсюда
,
отсюда
 . (2.13)
. (2.13)
Уравнения (2.13) называют уравнениями (или условиями) равновесия системы сходящихся сил в аналитической форме. Для плоской системы сходящихся сил достаточно системы координат из двух осей, например X и Y. Условия равновесия имеют вид
 , (2.14)
, (2.14)
и число неизвестных сил должно быть не более двух.
Задача 2.3
Груз Q, сила тяжести которого 120Н, поддерживается в равновесии стержнем АО и цепями АВ и АС (рис. 2.16). По концам стержня имеются шарниры. Длины цепей равны, т. е. АВ=АС; угол a = 300. угол ВАС- 900. Определить силы в цепях АВ и АС и стержне АО, считая их невесомыми.
Решение. Рассмотрим
равновесие узла А,
заменив действие стержня и цепей на
узел А
реакциями
![]() ,
,
![]() и
и
![]() ,
направив их, как показано на рис. 2.16.
Получим систему четырех сил, сходящихся
в точке А,
направим оси координат вдоль цепей и
нити подвеса груза. Составим
уравнения равновесия, спроецировав
систему сил на оси
координат. При определении проекции
реакции
,
направив их, как показано на рис. 2.16.
Получим систему четырех сил, сходящихся
в точке А,
направим оси координат вдоль цепей и
нити подвеса груза. Составим
уравнения равновесия, спроецировав
систему сил на оси
координат. При определении проекции
реакции
![]() на оси X
и
Y
применим
метод
двойного проецирования, спроецировав
ее вначале на плоскость АXY,
а
затем на оси
X
и
Y.
на оси X
и
Y
применим
метод
двойного проецирования, спроецировав
ее вначале на плоскость АXY,
а
затем на оси
X
и
Y.
Имеем:
Из
третьего уравнения находим, что S
= -Q/cos30°=
- 80![]() H.
H.
Знак «минус» указывает на то, что выбранное направление реакции следует заменить на обратное.
Из первого и второго уравнений находим
![]() .
.
Положительный
знак результата свидетельствует о том,
что выбранное направление реакций
![]() и
и
![]() соответствует
действительному. На стержень АО
и цепи действуют усилия, обратные
реакциям. Следовательно, стержень АО
сжат,
а цепи растянуты
(рис. 2.16).
соответствует
действительному. На стержень АО
и цепи действуют усилия, обратные
реакциям. Следовательно, стержень АО
сжат,
а цепи растянуты
(рис. 2.16).
2.6 Моменты силы относительно центра
и оси
Для рассмотрения различных систем сил необходимо ввести понятия алгебраического и векторного моментов силы относительно центра и момента относительно оси. Рассмотрим действия этих силовых факторов на твердое тело и их свойства.
М омент
силы относительно центра.
При рассмотрении плоской системы сил,
приложенных к твердому телу, используется
понятие алгебраического момента силы,
относительно центра О.
Под которым понимают, произведение силы
на длину перпендикуляра, опущенного из
центра на линию действия силы (рис.
2.17):
омент
силы относительно центра.
При рассмотрении плоской системы сил,
приложенных к твердому телу, используется
понятие алгебраического момента силы,
относительно центра О.
Под которым понимают, произведение силы
на длину перпендикуляра, опущенного из
центра на линию действия силы (рис.
2.17):
![]() (2.15)
(2.15)
Алгебраический
момент силы
относительно центра О
характеризует
вращательный эффект силы относительно
этого центра. Знак
«плюс» берут в случае, когда сила
![]() стремится
вращать тело против
часовой стрелки, а «минус» - по часовой.
Перпендикуляр h
называют
плечом
действия силы относительно
центра О.
Согласно
выражению
(2.15) размерность момента силы - Н
• м.
Модуль момента силы равен удвоенной
площади треугольника ОАВ:
стремится
вращать тело против
часовой стрелки, а «минус» - по часовой.
Перпендикуляр h
называют
плечом
действия силы относительно
центра О.
Согласно
выражению
(2.15) размерность момента силы - Н
• м.
Модуль момента силы равен удвоенной
площади треугольника ОАВ:
![]() , (2.15а)
, (2.15а)
и не меняется при переносе силы вдоль линии ее действия, так как при этом сохраняются основание треугольника АВ и его высота h.
Плоскость, определяемая треугольником ОАВ, - это плоскость действия момента силы.
В
механике момент силы относительно
центра принято изображать
в виде вектора
![]() - называемого
вектором
момента силы
относительно
- называемого
вектором
момента силы
относительно
ц ентра.
Этот вектор (рис. 2.18)
направлен перпендикулярно
к плоскости АОВ
в
ту сторону, откуда видно стремление
силы
повернуть плоскость АОВ,
связанную
с телом, против
часовой стрелки. Проведем
из центра О
в начало вектора силы
радиус-вектор
ентра.
Этот вектор (рис. 2.18)
направлен перпендикулярно
к плоскости АОВ
в
ту сторону, откуда видно стремление
силы
повернуть плоскость АОВ,
связанную
с телом, против
часовой стрелки. Проведем
из центра О
в начало вектора силы
радиус-вектор
![]() и рассмотрим векторное произведение
и рассмотрим векторное произведение
![]() .
По модулю
.
По модулю
 ,
что совпадает с модулем момента силы
(2.15). Направление вектора
,
что совпадает с модулем момента силы
(2.15). Направление вектора
![]() совпадает с направлением вектора момента
силы
совпадает с направлением вектора момента
силы
![]() .
Отсюда вытекает, что вектор момента
силы
совпадает с векторным произведением
:
.
Отсюда вытекает, что вектор момента
силы
совпадает с векторным произведением
:
![]() . (2.16)
. (2.16)
Пусть радиус-вектор
![]() и сила
и сила
![]() заданы своими проекциями на оси:
заданы своими проекциями на оси:
![]() и
и
![]() .
Тогда выражение (2.16) можно записать как:
.
Тогда выражение (2.16) можно записать как:
 (2.17)
(2.17)
С другой стороны, вектор можно спроецировать на оси координат:
![]() (2.18)
(2.18)
Сопоставляя выражения (6.3) и (6.4), получим, что проекции вектора момента силы на оси координат можно вычислить по формулам:
![]()
![]()
![]() .
(2.19)
.
(2.19)

Для наглядности
посмотрим, например, на систему координат
со стороны оси Z
(рис. 2.19). Ось Z
направлена к читателю,
![]() - проекция силы на плоскость ОXY.
Видно, что
- проекция силы на плоскость ОXY.
Видно, что
![]() .
Аналогично можно рассмотреть
.
Аналогично можно рассмотреть
![]() и
и
![]() .
Исходя из разложения вектора момента
силы в соответствии с выражением (2.18),
по формулам векторной алгебры можно
подсчитать его модуль:
.
Исходя из разложения вектора момента
силы в соответствии с выражением (2.18),
по формулам векторной алгебры можно
подсчитать его модуль:
![]() ,
,
или
![]() ,
(2.20)
,
(2.20)
а также направляющие косинусы:
 ;
;
 ;
;
 .
(2.21)
.
(2.21)
М омент
силы относительно оси. Алгебраическим
моментом силы
относительно оси Z
называют алгебраический момент проекции
Fn
этой силы на плоскость П
(рис. 2.20), перпендикулярную к оси Z,
относительно точки О
пересечения оси Z
с плоскостью П:
омент
силы относительно оси. Алгебраическим
моментом силы
относительно оси Z
называют алгебраический момент проекции
Fn
этой силы на плоскость П
(рис. 2.20), перпендикулярную к оси Z,
относительно точки О
пересечения оси Z
с плоскостью П:
![]() (2.22)
(2.22)
Действительно,
разложим силу
на составляющие
![]() перпендикулярную оси Z,
и
перпендикулярную оси Z,
и
![]() ,
параллельную оси z
(и, следовательно, перпендикулярную к
плоскости П).
Очевидно, что составляющая
не стремится повернуть тело вокруг оси
Z.
Это может осуществить только составляющая
,
параллельную оси z
(и, следовательно, перпендикулярную к
плоскости П).
Очевидно, что составляющая
не стремится повернуть тело вокруг оси
Z.
Это может осуществить только составляющая
![]() .
.
Момент силы относительно оси равен нулю, если сила и ось Z лежат в одной плоскости. При этом сила либо пересекает ось и h = 0, либо параллельна ей.
Векторный момент
силы (вектор момента силы) относительно
оси направлен по оси в сторону, откуда
действие момента
![]() видно против хода часовой стрелки. Его
векторное выражение
видно против хода часовой стрелки. Его
векторное выражение
![]() (2.23)
(2.23)
Ранее было показано,
что вектор
![]() момента силы
относительно точки О
перпендикулярен к плоскости треугольника
ОАВ
и по модулю равен удвоенной площади
этого треугольника. Вектор момента
перпендикулярен к плоскости треугольника
ОА1В1
и также равен удвоенной его площади
согласно выражению (6.1а). Но треугольник
ОА1В1
— проекция треугольника ОАВ
на плоскость П.
момента силы
относительно точки О
перпендикулярен к плоскости треугольника
ОАВ
и по модулю равен удвоенной площади
этого треугольника. Вектор момента
перпендикулярен к плоскости треугольника
ОА1В1
и также равен удвоенной его площади
согласно выражению (6.1а). Но треугольник
ОА1В1
— проекция треугольника ОАВ
на плоскость П.
Следовательно, между площадями этих треугольников имеется следующая зависимость:
![]()
где γ - угол между плоскостями треугольников.
Угол γ равен также углу между перпендикулярами к плоскостям треугольников, а значит, и между векторами и . Таким образом, между этими векторами имеет место зависимость
![]() ,
(2.24)
,
(2.24)
т. е. проекция
вектора момента силы относительно
некоторой точки О
на ось, проходящую через эту точку, равна
моменту силы относительно этой оси.
Точка О
на оси Z
взята произвольно, и при любом ее
положении проекция треугольника ОАВ
на плоскость П
равна треугольнику ОА1В1.
Очевидно, что для силы, расположенной
в плоскости П,
угол γ = 0 и
![]() .
При замене оси Z
на оси X
и Y,
также проходящие через точку О,
все приведенные ранее рассуждения
остаются справедливыми. Отсюда следует,
что на основании формул (2.19) и (2.24) имеют
место соотношения:
.
При замене оси Z
на оси X
и Y,
также проходящие через точку О,
все приведенные ранее рассуждения
остаются справедливыми. Отсюда следует,
что на основании формул (2.19) и (2.24) имеют
место соотношения:
 (2.25)
(2.25)
т. е. проекции момента силы относительно центра О на оси декартовой прямоугольной системы координат равны моментам силы относительно координатных осей.
Г лавный
момент системы сил относительно центра
и оси. Пусть
на тело действует система сил
лавный
момент системы сил относительно центра
и оси. Пусть
на тело действует система сил
![]() ,
,
![]() ,…
,…![]() .
Выберем некоторый центр О
и покажем момент каждой силы относительно
него в виде вектора
.
Выберем некоторый центр О
и покажем момент каждой силы относительно
него в виде вектора![]() .
Получим систему векторов
.
Получим систему векторов
![]() (где k
= 1,2,..., п), приложенных к точке О (рис.
2.21). Эту систему векторов можно сложить
по правилу параллелограмма или
многоугольника и получить результирующий
вектор
(где k
= 1,2,..., п), приложенных к точке О (рис.
2.21). Эту систему векторов можно сложить
по правилу параллелограмма или
многоугольника и получить результирующий
вектор
![]() ,
который называют главным моментом
системы сил относительно центра О
,
который называют главным моментом
системы сил относительно центра О
 . (2.26)
. (2.26)
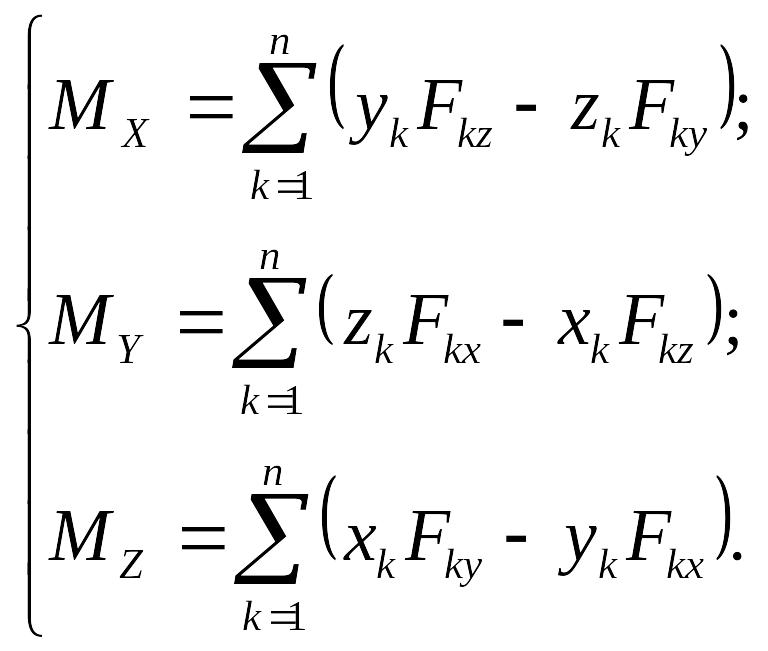
Главный момент выражается через проекции точек приложения сил xk, yk, zk и проекции сил на оси координат Fkx., Fky, Fkz следующим образом:
 (2.27)
(2.27)
Главный момент как вектор может быть спроецирован на какую-либо ось, например Z. При этом, как для любой результирующей, проекция ее на ось равна алгебраической сумме проекций составляющих на ту же ось:
 .
.
Если силы лежат в одной плоскости, то векторы моментов этих сил перпендикулярны к этой плоскости и главный момент сил относительно некоторого центра О, расположенного также на плоскости, равен алгебраической сумме моментов сил относительно этого центра:
 .
.
Следовательно, тело находится в равновесии (не вращается относительно данного центра), если главный момент сил относительно этого центра равен нулю:
![]() (2.28)
(2.28)
Это векторное условие равновесия тела, стремящегося повернуться вокруг центра О (т. е. в центре О тела имеется сферический шарнир).
Исходя из векторного условия и выражения (2.27), получим скалярные условия равновесия тела:
 (2.29)
(2.29)
Следовательно, тело находится в равновесии, если суммы моментов сил относительно координатных осей равны нулю.
Для равновесия тела относительно какой-либо одной оси необходимо, чтобы сумма моментов сил относительно этой оси равнялась нулю, например,
 .
.
Задача 2.4
Водонапорная
башня, свободно стоящая на поверхности,
подвержена ветровой
нагрузке, результирующая которой
![]() приложена на высоте h
(рис. 2.22).
Сила тяжести
башни
приложена на высоте h
(рис. 2.22).
Сила тяжести
башни
![]() .
Определить
значение силы
,
при
котором башня опрокинется.
.
Определить
значение силы
,
при
котором башня опрокинется.
Решение.
С ила
стремится
опрокинуть башню, повернув ее вокруг
точки В.
Составим
сумму моментов сил относительно этой
точки:
ила
стремится
опрокинуть башню, повернув ее вокруг
точки В.
Составим
сумму моментов сил относительно этой
точки:
![]() ,
,
откуда
![]() .
.
По условиям рассмотренного примера момент
Мопр = Fh называют опрокидывающим,
а момент
Муд = GL/2 — удерживающим.
Отношение удерживающего момента к опрокидывающему называют коэффициентом устойчивости:
kуст = Муд / Мопр.
Для устойчивого состояния объекта необходимо, чтобы выполнялось неравенство kуст > 1, и при проектировании незакрепленных объектов выбором значения kуст обеспечивается определенный запас их устойчивости.