

2.8 Расчет параметров настройки регуляторов
После выбора закона регулирования и анализа устойчивости системы необходимо обосновать параметры настройки регулятора. Существует несколько методик, по которым проводится этот расчет. Расчет оптимальных параметров регуляторов зависит от типа регулятора и переходного процесса в системе. Характер переходного процесса в нелинейных автоматических системах с релейными (позиционными) регуляторами определяется статической характеристикой релейного элемента и видом объекта (статический, астатический, с запаздыванием, без запаздывания).
Подробно методика расчета параметров настройки непрерывных и позиционных регуляторов приведена в литературе [1,14]. Рассматриваемый в курсовом проекте объект представляется апериодическим звеном с запаздыванием, а в качестве регулятора двухпозиционный регулятор с зоной нечувствительности. В этом случае диапазон колебаний регулируемой величины (температуры) будет больше зоны неоднозначности регулятора, так как регулятор будет реагировать на фактическое изменение регулируемой величины с запаздыванием .
Формулы
для расчета длительности положительной
![]() и отрицательной
и отрицательной ![]() амплитуд автоколебаний, их периода
,
частоты переключения п регулятора,
положительной
амплитуд автоколебаний, их периода
,
частоты переключения п регулятора,
положительной ![]() и отрицательной
и отрицательной ![]() амплитуды отклонения регулируемой
величины от заданного значения и
диапазона
амплитуды отклонения регулируемой
величины от заданного значения и
диапазона ![]() колебаний
регулируемой величины можно определить
по следующим выражениям [1,
14].
колебаний
регулируемой величины можно определить
по следующим выражениям [1,
14].
Статические характеристики двухпозиционного регулятора для статического объекта с передаточной функцией:
![]() ,
,
можно рассчитать по следующим формулам:
1-случай
![]() .
.
![]() ;
;
![]() .
.
2-случай
![]() .
.
![]() ;
;
![]() ;
;
 ;
;
![]()
![]()
![]()
Равенства амплитуд колебаний управляемой величины относительно заданного значения при практической настройке регулятора добиваются корректировкой заданного значения регулируемой величины.
Задание регулятора следует скорректировать на величину:
![]() .
.
Из
приведенных формул следует, что уменьшение
зоны неоднозначности ![]() приводит к уменьшению периода колебаний
приводит к уменьшению периода колебаний
![]() и увеличению числа переключений п
регулятора. Уменьшение числа переключений
возможно за счет уменьшения количества
энергии, коммутируемой регулятором
(мощности электрокалориферной установки).
При этом следует иметь в виду, что
регулирующие воздействие регулятора
должно полностью компенсировать
возможные возмущающие воздействия на
объект.
и увеличению числа переключений п
регулятора. Уменьшение числа переключений
возможно за счет уменьшения количества
энергии, коммутируемой регулятором
(мощности электрокалориферной установки).
При этом следует иметь в виду, что
регулирующие воздействие регулятора
должно полностью компенсировать
возможные возмущающие воздействия на
объект.
Увеличение постоянной времени объекта при прочих равных условиях увеличивает период колебаний и уменьшает частоту переключений регулятора.
По полученным данным необходимо построить переходные процессы с указанием параметров автоколебаний.
Приложение а Пример проектирования сау
В качестве примера рассмотрим курсовой проект на тему: «Разработать систему автоматического управления температурой воздуха в коровнике для переходного периода времени года».
Исходные данные для проектирования:
количество животных — 50 голов;
удельный объем помещения — 16 м3/гол;
температура внутри помещения — +12ºС;
температура наружного воздуха — -10ºС;
тепловая характеристика помещения, q — 2,5 кДж/м3 ч;
отношение времени запаздывания к постоянной времени, — 0,12;
допустимое отклонение температуры от заданного значения — ±3°С;
теплоноситель системы – воздух.
Для
нагревания теплоносителя используется
электрокалориферная установка с двумя
ступенями нагревательных элементов
![]() и
и ![]()
В
установившемся состоянии поддержание
заданной температуры в объекте
обеспечивается нагревателями мощностью
![]() .
.
В рассматриваемом примере управляемая величина - температура воздуха в помещении . Система должна обеспечить автоматическую стабилизацию, значение в управляемом объекте - животноводческом помещении, являющемся статическим объектом с самовыравниваем. Возмущающие воздействия - отток теплоты из помещения через вентиляцию, ворота, ограждение и т.п.
Учитывая, что резкие перепады внешних температур для переходного периода не характерны, будем считать примерно равными время переходного процесса в объекте и интервал времени между двумя последовательными возмущениями.
Регулирующий орган РО - электрокалориферная установка осуществляет подачу нагретого теплоносителя в помещение, т.е. осуществляет управляющее воздействие. Предполагается, что животноводческое помещение оборудовано системой вентиляции, обеспечивающей необходимую кратность воздухообмена. Точность поддержания температуры в помещении - ±10% от указанных в задании значений.
Структурная схема САУ представлена на рисунке 2.2.
При проектировании системы целесообразно использовать серийно выпускаемые недорогие средства автоматизации.
В качестве регулятора целесообразно выбрать двухпозиционный регулятор с выходным элементом реле (регулятор типа РТ, ПТР, МЭТРС, ТЭ, ТМ2).
Воспринимающий орган - малоинерционный, металлический терморезистор (типа ТСМ или ТСП). Регулирующий орган - электрокалориферная установка типа СФОЦ.
Оценить правильность предварительного выбора принципа регулирования и основных элементов системы можно лишь после изучения свойств и характеристик отдельных элементов и всей системы в целом.
На основании выбранного принципа управления и технических средств можно составить функциональную схему системы.
Функциональная схема - основной документ, поясняющий принцип действия системы и взаимодействия отдельных функциональных устройств. Перед составлением функциональной схемы следует досконально изучить принцип действия используемых устройств и технических средств автоматизации.
Для
составления
математических моделей элементов
системы автоматического управления
примем
для коровника упрощенную модель
(модель
объекта управления),
когда плотность воздуха не зависит от
температуры и давления внутри помещения,
тепловыделения животных постоянны,
обобщенным показателем является удельная
тепловая характеристика ![]() кДж/м3·ºС·ч.
кДж/м3·ºС·ч.
Суммарное количество теплоты, необходимое для отопления помещения, можно вычислить по формуле [5]:
![]() ,
кДж/ч.
,
кДж/ч.
Объем
помещения
,
(заданное количество коров ![]() ,
удельный объем помещения
,
удельный объем помещения ![]() м3/гол):
м3/гол):
![]() (кДж/ч).
(кДж/ч).
Постоянную времени коровника можно определить по упрощенной формуле:
![]() .
.
Запаздывание
в объекте ![]()
Примем
![]()
Упрощенно, животноводческое помещение можно представить в виде последовательно соединенных апериодического звена и звена чистого запаздывания.
![]() ,
,
где
-
коэффициент передачи объекта (![]() ).
).
![]() .
.
Рассмотрим модель регулирующего органа. В качестве регулирующего органа используется электрокалориферная установка. Мощность электрокапориферной установки определим по формуле:
, кВт,
где
![]() (к.п.д электрокалориферной установки);
(к.п.д электрокалориферной установки);
![]() кВт.
кВт.
Из
таблицы П.2 выбираем ближайшую по мощности
электрокалориферную установку. Это
электрокалорифер марки СФОЦ-16/05, ![]() Установленная мощность
Установленная мощность ![]() кВт.
Мощность нагревателей
кВт.
Мощность нагревателей ![]() кВт.
кВт.
Перепад
температуры нагреваемого воздуха ![]() .
.
Динамическая модель электрокалориферной установки будет соответствовать
![]() ;
;
![]() ;
;
![]() ;
;

Рассмотрим два возможных варианта формирования управляющего воздействия.
1-вариант
Мощность первой ступени электрокалорифера
![]() кВт.
кВт.
В
этом случае управляющие воздействия
![]() .
.
2-вариант
Мощность первой ступени электрокалорифера
![]() кВт.
кВт.
При
этом ![]() .
.
Примечание: электрокалориферы комплектуются унифицированными ТЭН-ами номинальной мощностью 2,5 кВт, 1,6 кВт.
В рассматриваемой системе воспринимающий орган (датчик) преобразовывает температуру воздуха в коровнике в сигнал, удобный для дальнейшей обработки в системе. Предварительно выбранные регуляторы температуры комплектуются термометрами сопротивления типа ТСМ с градуировкой ГР.22 или ГР.23
Диапазон
изменения регулируемой величины
-
температуры - должен находиться в
пределах 0,3÷0,75 диапазона измерения
датчика. По этому показателю выбираем
термометр сопротивления ТСМ 5071 с
пределами измерения 0°С -50°С~... 150°С с
градуировкой ГР24 номинальным сопротивлением
100 Ом при ОС. Постоянная времени ![]() (данные
взяты из таблицы П.2).
(данные
взяты из таблицы П.2).
Коэффициент передачи датчика определим из выражения:
![]() Ом/°С.
Ом/°С.
Передаточная функция воспринимающего органа (датчик):

Учитывая,
что в задании на проектировании отношении
![]() задано равным 0,12,
что меньше, чем 0,2, выбираем позиционный
закон регулирования.
задано равным 0,12,
что меньше, чем 0,2, выбираем позиционный
закон регулирования.
В качестве регулятора выберем серийно выпускаемый регулятор на микроэлектронных элементах ТМ2 с диапазоном регулирования температуры от 0 до 40°С с зоной возврата 0...10°С.
Выбранный регулятор температуры имеет статическую характеристику (см.рисунок 2.4).
Зона
неоднозначности регулятора
![]() ,
изменение
регулирующего
воздействия в относительных единицах
при включении регулятора
,
изменение
регулирующего
воздействия в относительных единицах
при включении регулятора ![]() В2
-
при
отключении
В2
-
при
отключении ![]() т.е.
т.е.
![]() Второй вариант
Второй вариант ![]()
Принимаем
![]() в поименных единицах. В относительных
единицах
в поименных единицах. В относительных
единицах ![]()
Математическую модель системы составим на основе алгоритмической структурной схемы. Система состоит из регулятора с нелинейной статической характеристикой и линейной части. Линейная часть включает последовательно соединенные звенья с передаточной функцией (см.рисунок П.1):

;
Объединив два звена с чистым запаздыванием и подставив, численные значения известных величин, получим:
![]() ;
;
![]() ;
;
![]() .
.
Устойчивость основной показатель, определяющий работоспособность системы. Неустойчивая система неработоспособна. Прежде чем определить устойчивость системы в целом, необходимо убедиться в устойчивости линейной части системы. В контуре системы управления имеется звено с запаздыванием, поэтому для определения устойчивости необходимо применить графический метод на базе критерия Найквиста или звено с запаздыванием заменить апериодическим звеном первого или второго порядка.
Для определения устойчивости проектируемой системы достаточно убедиться в устойчивости линейной части, поэтому остановимся на применении упрощенной методики определения устойчивости по критерию Гурвица.
Структурную схему системы можно упростить и представить в виде нелинейного элемента и линейной части (см.рисунки П.1, П.2).

Рисунок П.1 - Алгоритмическая структурная схема системы
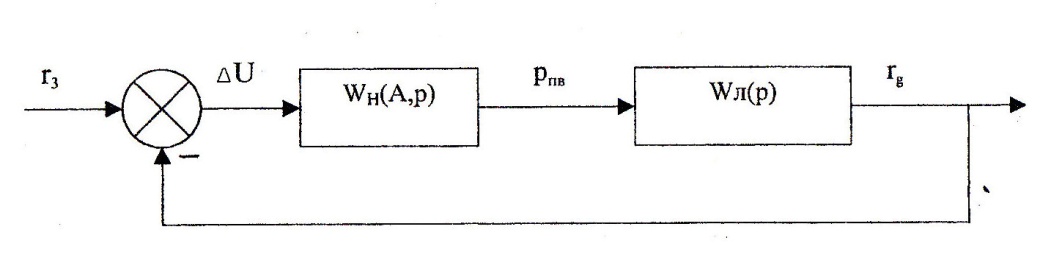
Рисунок П.2 - Упрощенная алгоритмическая структурная схема
Для определения устойчивости проектируемой системы достаточно убедиться в устойчивости линейной части, поэтому остановимся на применении упрощенной методики определения устойчивости по критерию Гурвица.
Передаточную функцию звена с запаздыванием аппроксимируем апериодическим звеном первого порядка:
![]() .
.
Подставляя
это значение в выражение ![]() ,
получим:
,
получим:
![]() .
.
Характеристическое уравнение линейной части системы приведем к стандартному виду:
![]()
![]() ;
;
![]()
![]() с;
с;
![]()
![]() с;
с;
![]()
![]() .
.
Характеристическое уравнение линейное части системы:
![]() .
.
Все коэффициенты характеристического уравнения больше нуля, поэтому необходимое условия устойчивости выполняется.
Из коэффициентов характеристического уравнения составим определитель Гурвица:
 .
.
Для устойчивости линейной части системы достаточно, чтобы все диагональные миноры определителя также были больше нуля:
![]() ;
;
![]()
˃ 0;
˃ 0;
![]() .
.
Линейная часть системы устойчива.
Переходим к определению устойчивости системы в целом методом гармонической линеаризации. Для упрощения расчета линейную часть системы, которая является обобщенным статическим объектом с самовыравниванием по отношению к регулятору преобразуем к виду:
![]() ,
,
где
![]()
![]() ;
;
![]() примем
примем
![]()
Звено с запаздыванием заменим апериодическим звеном первого порядка:
![]() .
.
Передаточную функцию двухпозициопного регулятора методом гармонической линеаризации представим в виде:
![]() .
.
Коэффициенты линеаризации b(A) и c(A) определим по формулам [1,13]:
![]() ;
;
![]() .
.
Заменяя р на jω по аналогии с линейными системами, получаем выражение для АФЧХ нелинейного элемента:
![]() .
.
Условия возникновения автоколебаний в нелинейной системе определим по критерию устойчивости Найквиста.
Условием возникновения автоколебаний является:
![]()
Передаточная функция типичных нелинейных элементов зависит только от амплитуды входных сигналов. В этом случае условия возникновения автоколебаний можно записать:
![]() ,
,
где
![]() -
частота автоколебаний;
-
частота автоколебаний;
![]() - амплитуда автоколебаний.
- амплитуда автоколебаний.
Для инженерных расчетов применяется графическое решение данного уравнения, для чего в одних координатах строят АФЧХ линейной и нелинейной частей системы.
Графическое построение АФЧХ линейной части системы и нелинейного элемента связано с большим объемом вычислений и графических построений и дает приблизительные значения частоты и амплитуды автоколебаний.
В курсовом проекте ограничимся определением этих параметров из переходной характеристики процесса регулирования, которую можно построить после расчета параметров регулятора.
Статическая характеристика для расчетов параметров настройки и переходного процесса двухпозиционного регулятора с зоной нечувствительностью имеет следующие параметры:
Вариант
1:
![]() .
.
Вариант
2: ![]() .
.
Обобщенный объект управления с передаточной функцией:
,
имеет следующие параметры (одинаковые для обоих вариантов)
![]()
![]()
![]()
![]() .
.
Вариант 1. Расчет параметров настройки регулятора.
Продолжительность
положительной ![]() и отрицательной
и отрицательной ![]() амплитуд автоколебаний
амплитуд автоколебаний
![]()
= 949,2 c.
Период
автоколебаний ![]() .
.
Частота
переключения регулятора ![]() .
.
Амплитуда
положительного ![]() и отрицательного
и отрицательного ![]() отклонения регулируемой величины от
заданного значения:
отклонения регулируемой величины от
заданного значения:
![]() .
.
В абсолютных единицах:
![]() .
.
Диапазон колебаний регулируемой величины (амплитуда автоколебаний):
![]() .
.
Действительное
значение диапазона изменения регулируемой
величины
на
0,96°С
больше допустимого по заданию значению
(6°С), это составляет ![]() от заданного значения температуры в
коровнике (12°С), что допустимо по
зоотехническим требованиям.
от заданного значения температуры в
коровнике (12°С), что допустимо по
зоотехническим требованиям.
Амплитуда автоколебаний соответствует ширине диапазона колебаний:
![]() .
.
Частота автоколебаний:
![]() рад/с.
рад/с.
Вариант
2. (![]() ).
).
Продолжительность положительной амплитуды:
![]() -
0,83)
/ 0,33
= 1636,4
с.
-
0,83)
/ 0,33
= 1636,4
с.
Продолжительность отрицательной амплитуды:
![]() +
0560
ln
(1,5
– 0,33)
/.0,83
= 856 с.
+
0560
ln
(1,5
– 0,33)
/.0,83
= 856 с.
Период автоколебаний:
![]() .
.
Частота переключения регулятора:
![]() .
.
Амплитуда положительного отклонения:
![]()
.
Амплитуда отрицательного отклонения:
![]() .
.
В абсолютных единицах:
![]()
![]()
Диапазон колебаний регулируемой величины:
![]()
Так как значение и не равны, для обеспечения равенства амплитуд колебаний температуры относительно принятого значения температуры, задание регулятору при его настройке следует скорректировать на величину [1]:
![]()
или в абсолютных единицах:
![]() .
.
Диапазон колебаний регулируемой величины:
![]()
Диапазон
изменения температуры в проектируемой
системе по варианту 2 получился больше
требуемого (6°С) на 0,16°С, что составляет
1,3% от заданного значения, что вполне
достаточно для практики. Второй вариант
обеспечивает более точнее стабилизацию
температуры в коровнике, однако имеет
более продолжительный период автоколебаний.
По полученным данным построим графики
переходного процесса для первого
варианта (см.рисунок
П.3).
Амплитуда автоколебаний ![]() .
.
Частота
автоколебаний ![]() рад/с.
рад/с.
Для экономического обоснования системы автоматического управления температурным режимом в животноводческом помещении в проекте рассмотрены два возможных варианта системы управления. В обоих вариантах используются одинаковые типы оборудования и решают одну и ту же задачу. Из двух вариантов необходимо выбрать тот вариант, который требует меньший расход электрической энергии на отопление.
Исходные данные для определения затрат электроэнергии.
Вариант 1.
Мощность
электрокалориферной установки
кВт, первой ступени ![]() кВт.
кВт.
Продолжительность
работы электрокалориферной установки
на полную мощность ![]()
![]() с или 0,264 часа.
с или 0,264 часа.
Продолжительность
работы электрокалориферной установки
на первой ступени мощности ![]()
![]() с или 0,264 часа.
с или 0,264 часа.
Количество циклов работы электрокалориферной установки в сутки:
![]() .
.
Затраты электроэнергии в сутки, кВт·ч:
![]() кВт·ч.
кВт·ч.
Вариант 2.
Мощность
электрокалориферной установки
кВт, первой ступени ![]() кВт. Продолжительность работы
электрокалориферной установки на полную
мощность
кВт. Продолжительность работы
электрокалориферной установки на полную
мощность ![]() с или 0,43 часа.
с или 0,43 часа.
Продолжительность
работы электрокалориферной установки
на первой ступени ![]() с или 0,24 часа.
с или 0,24 часа.
Количество циклов работы за сутки:
![]() .
.
Затраты электроэнергии в сутки:
![]() кВт·ч.
кВт·ч.
Из проведенных расчетов следует, что затраты электроэнергии во втором варианте за сутки на 50,6 кВт и больше, что составляет 19% от первого варианта.
Отсюда следует, хотя второй вариант реализации системы обеспечивает точное регулирование температурного режима в коровнике, но требует затрат электроэнергии на 19% больше. Поэтому из двух вариантов следует остановиться на первом, который обеспечивает приемлемый режим при меньших затратах.
Для технической реализации выбранного варианта системы автоматического управления температурным режимом в животноводческом помещении необходимо разработать принципиальную схему с указанием всех элементов, входящих в неё элементов, и связи между ними.
Базовая принципиальная электрическая схема станции управления электрокалориферной установкой приведена в литературе [2,3,8,9]. Базовую схему необходимо привести в соответствие с полученным в проектируемой системе количеством нагревательных элементов и мощностью каждой позиции ( , ).
Дополнить регулятором и датчиком (воспринимающим органом).
Перечень элементов с указанием их марок и параметров сводится в таблицу.
Возможны несколько вариантов выполнения и технической реализации принципиальных схем в зависимости от используемых в схеме элементной базы. Поэтому принципиальная схема разрабатывается студентом, самостоятельно использующим знания, полученные при изучении родственных дисциплин и литературных источников.
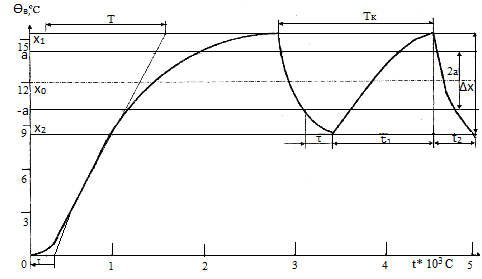
Рисунок П.1 - 1 вариант
Основные технические данные электрокалориферных установок типа СФОЦ-X/05-И1, термометров сопротивления и технические характеристики регуляторов температуры приведены в таблицах П.1, П.2, П.3.
Таблица П.1 - Основные технические данные электрокалориферных установок типа СФОЦ-X/05 -И1
Показатель |
СФОЦ -5 |
СФОЦ -10 |
СФОЦ -16 |
СФОЦ-25 |
СФОЦ -40 |
СФОЦ -60 |
СФОЦ -100 |
СФОЦ -160
|
|||||
Установленная мощность, кВт: |
4,92 |
10,0 |
16,1 |
23,6 |
47,2 |
69,7 |
97,5 |
170,5 |
|||||
в том числе: нагревателей, кВт |
4,8 |
9,6 |
15,0 |
22,5 |
45,0 |
67,5 |
90,0 |
163 |
|||||
электродвигателя, кВт |
0,12 |
0,4 |
1,1 |
1,1 |
2,2 |
2,2 |
7,5 |
7,5 |
|||||
минимальная |
500 |
700 |
1500 |
1500 |
1500 |
4000 |
6000 |
10000 |
|||||
максимальная |
1000 |
1400 |
3000 |
3000 |
5000 |
8000 |
12000 |
20000 |
|||||
перепад температуры нагреваемого воздуха при мин. производ, м3/°С |
40 |
40 |
40 |
60 |
60 |
60 |
60 |
60 |
|||||
при максимальной производит., м3/°С |
20 |
20 |
20 |
30 |
30 |
30 |
30 |
30 |
|||||
тип вентилятора |
Ц4-70 |
Ц4-70 |
Ц4-70 |
Ц4-70 |
Ц4-70 |
Ц4-70 |
Ц4-70 |
Ц4-70 |
|||||
номер вентилятора |
2,5 |
3,2 |
4 |
4 |
5 |
5 |
6,3 |
8 |
|||||
Таблица П.2 - Термометры сопротивления
Вид, тип |
Градуировка |
Номинальное сопротивление при 0°С, Ом
|
Пределы измерения, °С |
Показатель тепловой инерции |
Медные:
|
||||
ТСМ-Х |
23 |
53 |
-50... + 100 |
4 мин |
ТСМ-6097 |
23 и 24 |
53 и 100 |
-50...+150 |
4 мин |
ТСМ-5071 |
23 и 24 |
53 и 100 |
-50…+150 |
120 с |
ТСМ-010 |
23 |
53 |
-50... + 100 |
2,5 мин |
ТСМ-5114 |
23 |
53 |
-50...+100 |
25 с |
ТСМ-148 |
23 |
53 |
0...+120 |
80 с |
ТСМ-8034 |
23 |
53 |
-50...+85 |
30 с |
Платиновые:
|
||||
ТСП-8012 |
22 |
100 |
0...+50 |
20 мин |
ТСП-6104 |
22 |
100 |
-50...+60 |
20 с |
ТСП-154 |
21 |
46 |
-5... + 140 |
20 с |
ТСП-6105 |
22 |
100 |
-260...+200 |
9 с |
ТСП-955М |
22 |
100 |
0... + 100 |
9 с |
Таблица П.3 - Технические характеристики регуляторов температуры
Тип |
Закон регулирования пределы настройки, ºС
|
Диапазон регулирования, ºС |
Зона возврата, С |
Тип датчика |
РТ-049 |
Двухпозиционный 100...+400 |
40:100:150:300 |
1...10 |
Термометр Гр 22: Гр 23 |
ПТР, ПО |
Двух- трехпозиционый Пропорциональный -40... + 100 |
20:25:30:50 |
0,5...5 |
Терморезистор погруженный камерный |
МЭТРС |
Двух- трехнозиционный -10...+300 |
40:100:150 |
0,5…10 |
Термометр Гр 21: Гр 22: Гр 23: Гр 24 |
ТЭ, ТМ 2, ТМ 8 |
Двух-трехпозиционный -40...+120 |
40 |
0,5…10 |
Термометр Гр 22: Гр 23 |