

2.6 Составление математической модели системы автоматического управления
В инженерной практике для оценки статических и динамических свойств системы используются математические модели, устанавливающие взаимосвязь входных и выходных величин в установившихся (статических) и переходных (динамических) режимах, получаемые аналитически или экспериментально.
Математическую модель системы автоматического управления удобно представить в виде алгоритмической структурной схемы. Алгоритмическая структурная схема САУ температурой животноводческого помещения представлена на рисунке 2.5.
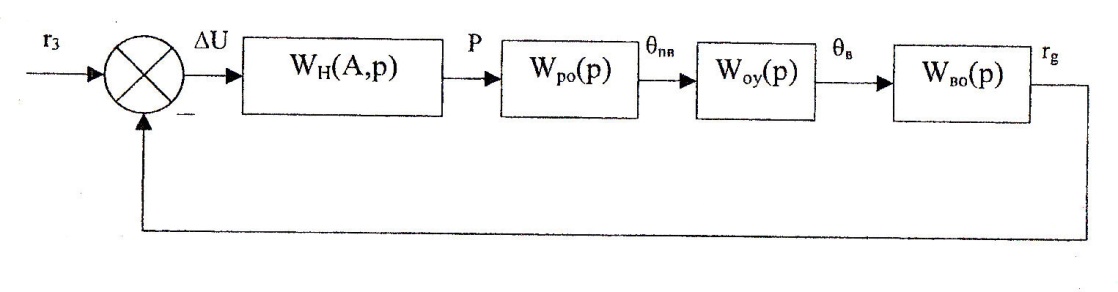
![]() - передаточная функция регулятора;
- передаточная функция регулятора;
![]() - передаточная функция электрокалориферной
установки РО;
- передаточная функция электрокалориферной
установки РО; ![]() -
передаточная функция объекта;
-
передаточная функция объекта; ![]() -
передаточная функция датчика -
воспринимающего органа.
-
передаточная функция датчика -
воспринимающего органа.
Рисунок 2.5 - Алгоритмическая структурная схема САУ
В рассматриваемой системе в качестве регулятора используется двухпозиционный регулятор с зоной нечувствительностью. Ширина зоны нечувствительности выбирается из задания на проектирование (ΔР < Δп).
Учитывая, что регулятор имеет нелинейную статическую характеристику система в целом является нелинейной.
Регулирующий орган - электрокалориферная установка имеет передаточную функцию:
![]() .
.
Передаточная функция объекта управления имеет вид:
![]() .
.
И передаточная функция воспринимающего органа
.
Специфической особенностью нелинейной системы является режим автоколебаний.
Автоколебания в нелинейных системах являются устойчивым режимом работы. Например, в системе автоматической стабилизации температуры с нелинейным управляющим устройством. При анализе нелинейных систем решают следующие задачи:
- отыскание возможных состояний равновесия системы и оценка их устойчивости.
- определение параметров автоколебаний и их связь с параметрами системы.
Обычно в нелинейной системе содержится один существенно нелинейный элемент.
Линейная часть включает в себе все элементы с линейными или линеаризованными характеристиками и может иметь структуру любой сложности.
В рассматриваемой системе нелинейным элементов является двухпозиционный регулятор температуры, а линейная часть включает регулирующий орган (РО), объект управления (ОУ) и воспринимающий орган (ВО).
2.7 Анализ устойчивости системы
Одной из важнейших характеристик системы автоматического управления является устойчивость. Неустойчивая система неработоспособна, т.е. она не способна выполнить функции управления и может привести управляемый объект в аварийное состояние. Любая практическая система должна быть устойчивой.
Условия устойчивости реальных систем автоматического управления сформулировал А.М Ляпунов:
1) Если линейная САУ устойчива, то устойчива и реальная САУ, при этом никакие отброшенные при линеаризации члены не могут изменить её устойчивость.
2) Если линейная САУ неустойчива, то неустойчива и реальная САУ, при этом никакие отброшенные при линеаризации члены не могут изменить её устойчивость.
В связи с этим необходимо убедиться в устойчивости линейной части системы с передаточной функцией.
 .
.
Объединив два звена с чистым запаздыванием, получим
 .
.
Когда в контуре системы управления присутствует звено запаздывания, то характеристическое уравнение системы будет трансцендентным, решение которого связано с большими трудностями. Поэтому в практических расчетах трансцендентную передаточную функцию раскладывает в ряд Пада. Учитывая только два или три члена ряда, приближенно заменяют её дробной рациональной функцией [6]:
![]() .
.
Такая замена дает удовлетворительное приближение, если частота входного сигнала:
![]() ,
(рад/с).
,
(рад/с).
Другим способом приближенной аппроксимации звена запаздывания является представление его в виде последовательного соединения нескольких инерционных звеньев первого порядка с одинаковыми постоянными времени
Ti = τ/n:
![]() .
.
Учитывая, что для рассматриваемом в курсовом проекте системе не требуется высокая точность аппроксимации, звено с запаздыванием заменим одним инерционным звеном с передаточной функцией:
![]() .
.
Соответственно, передаточная функция линейной части системы соответствует следующему выражению:
 .
.
Обозначим
сумму ![]() .
.
Запишем передаточную функцию линейной части в стандартной форме:

,
где
![]()
![]()
![]()
![]()
![]() .
.
Используя критерии Гурвица или Рауса, определим устойчивость линейной части системы. Расчет рассмотрим при определении устойчивости на примере конкретной системы. При условии устойчивости линейной части системы можно переходить к определению устойчивости системы в целом.
Для определения устойчивости нелинейных систем применяется метод гармонической линеаризации (наряду с другими методами).
Метод гармонической линеаризации является приближенным методом, который позволяет определить условия возникновения и параметры автоколебаний.
При высоком порядке характеристического полинома системы этот метод требует значительных вычислений. Расчет упростится, если линейную часть системы, которая является по отношению к регулятору обобщенным статическим объектом с самовыравниванием, представим последовательно соединенными апериодическим звеном первого порядка и звеном с чистым запаздыванием [1, 3, 11]:
![]() ,
,
где
![]()
![]()
Численные значения , , определим при рассмотрении примера конкретного объекта:
- В результате такого обобщения получаем нелинейную систему с двухпозиционным регулятором и объектом управления, для исследования которой применим метод гармонической линеаризации.
- Сущность метода заключается в замене существенного нелинейного элемента, эквивалентным линейным звеном.
- Условием эквивалентности служит равенство амплитуд и фаз выходного сигнала эквивалентного звена и первой гармоники выходного сигнала реального нелинейного элемента.
- Гармоническая линеаризация принципиально отличается от обычной линеаризации, так как коэффициенты линеаризованного элемента непостоянны и зависят от амплитуды входного сигнала. Коэффициенты гармонической линеаризации зависят от вида нелинейности и приведены в литературе [1.14].
Например, передаточную функцию двухпозиционного регулятора с зоной нечувствительности можно определить из выражения:
![]()
где
![]() и
и ![]() -
коэффициенты
линеаризации при А > а.
-
коэффициенты
линеаризации при А > а.
 ;
;
![]() ,
,
где и - параметры статической характеристики регулятора (нелинейного элемента).
Заменяя
![]() на
на ![]() получаем выражение для АФЧХ нелинейного
элемента
получаем выражение для АФЧХ нелинейного
элемента
![]() .
.
Когда линейная часть системы описывается уравнением высокого порядка или содержит запаздывание для определения параметров автоколебаний, используется критерий Найквиста. Условием существования автоколебаний является равенство:
![]()
или
![]() ,
,
где
![]() - АФЧХ всех линейных звеньев системы, а
правая часть
-
обратная характеристика нелинейного
элемента с противоположным знаком.
- АФЧХ всех линейных звеньев системы, а
правая часть
-
обратная характеристика нелинейного
элемента с противоположным знаком.
Данное уравнение удобно решать графически. Для этого необходимо построить АФЧХ линейной части и обратную характеристику нелинейного элемента в одной системе координат.
В
точках пересечения кривых определяют
параметры автоколебаний. На кривой
определяет
частоту автоколебаний ![]() ,
на кривой
,
на кривой ![]() –
амплитуду
автоколебания
–
амплитуду
автоколебания
![]()
Факт
устойчивости или неустойчивости режима
автоколебаний устанавливают при помощи
следующего правила: если
точка на кривой ![]() ,
близкая к точке пересечения, но сдвинутая
в направлении возрастания параметра
,
близкая к точке пересечения, но сдвинутая
в направлении возрастания параметра
![]() ,
не охватывается характеристикой
,
не охватывается характеристикой ![]() ,
то автоколебания устойчивы, если же
охватывается,
то автоколебания неустойчивы.
,
то автоколебания устойчивы, если же
охватывается,
то автоколебания неустойчивы.