

2.4 Выбор первичных измерительных преобразователей (датчиков)
Воспринимающий орган или датчик выбирается в два этапа.
На первом этапе по роду контролируемого параметра и условием работы определяет разновидность датчика, а на втором этапе, после выбора всех элементов системы, по каталогу находят его тип. Воспринимающий орган (датчик) выбирается таким образом, чтобы диапазон изменения измеряемой величины находился в пределах 0,3 ÷ 0,75 диапазона измерения датчика. Особое внимание необходимо обращать на инерционность датчика.
Постоянное
времени датчика определяется из условия
![]() .
.
Передаточная функция воспринимающего органа можно представить в виде инерционного звена первого порядка:
![]() .
.
Коэффициент
передачи воспринимающего органа
(датчика) определяется как отношение
изменения сопротивления ![]() к соответствующему диапазону изменения
температуры
к соответствующему диапазону изменения
температуры ![]() :
:
![]() ,
,
![]() .
.
Технические параметры датчиков приведены в литературе [1,7,10], параметры термометров сопротивления приведены в таблицах П.2, П.3.
На практике используется медные термометры сопротивления (ТСМ) на номинальное сопротивление 53 Ом (гр22) и 100 Ом (гр24) для измерения температуры от -50 до +180 ºС, а также платиновые термометры сопротивления на номинальные сопротивления 46 Ом (гр 21) и 100 Ом (гр22) для измерения температуры от -200 до +650 ºС.
Чувствительность (коэффициент передачи) медного термометра сопротивления определяется по формуле:
![]() ,
,
где
![]() - сопротивление датчика при 0°С,
значение которого соответствует
градуировке (гр 23 или гр 24);
- сопротивление датчика при 0°С,
значение которого соответствует
градуировке (гр 23 или гр 24);
![]() - температурный коэффициент, сопротивление,
соответствующий для меди 3,8 10-3
1/град.
- температурный коэффициент, сопротивление,
соответствующий для меди 3,8 10-3
1/град.
Полупроводниковые терморегуляторы обладают большей чувствительностью, выпускаются две группы терморезисторов: с отрицательным температурным коэффициентом сопротивления термисторы и положительным - позисторы. Зависимость сопротивления терморезисторов от температуры нелинейна Чувствительность терморезисторов определяется экспериментально. Номинальное сопротивление и постоянный коэффициент указываются на корпусе терморезистора.
2.5 Обоснование закона регулирования и выбор регулятора
Система
автоматического управления состоит из
регулятора и объекта управления.
Критерием правильного выбора закона
регулирования служит отношение времени
чистого запаздывания объекта ![]() к его постоянной времени,
к его постоянной времени, ![]() .
Если
.
Если ![]() ,
выбирают регулятор позиционного
действия, при
,
выбирают регулятор позиционного
действия, при ![]() -
регулятор импульсного типа; если
-
регулятор импульсного типа; если ![]() - непрерывный закон регулирования.
- непрерывный закон регулирования.
При обосновании закона регулирования и выборе соответствующего ему регулятора нужно знать не только свойства объекта, но и некоторые конструктивные особенности самих регуляторов.
Промышленные регуляторы реализуют законы регулирования с определенной погрешностью. Свойства регулятора и других технических устройств, входящих в состав системы автоматического управления, должны быть учтены. В сельскохозяйственном производстве широко используются регуляторы, реализующие позиционные и непрерывные законы.
Позиционные (релейные) регуляторы работают по принципу: включено- выключено, они выдают сигнал, обеспечивающий перемещение регулирующего органа в одно из фиксированных положений - позиций. По количеству позиций различают двух-, трех- и многопозиционные регуляторы. Процесс позиционного регулирования - автоколебательный.
Двухпозиционные регуляторы имеют статические характеристики без зоны неоднозначности и с зоной неоднозначности.
В
качестве примера приведем статическую
характеристику двухпозиционного
регулятора с зоной неоднозначности.
Границы зоны неоднозначности обозначены
![]() и
и ![]() ,
ширина зоны неоднозначности
,
ширина зоны неоднозначности ![]() ;
;
![]() и
и ![]() - выходные воздействия регулятора.
В
общем случае регулятор может оказывать
в одну сторону воздействия
- выходные воздействия регулятора.
В
общем случае регулятор может оказывать
в одну сторону воздействия ![]() а в другую сторону воздействия
а в другую сторону воздействия ![]() ,
при этом
,
при этом ![]() .
.
На рисунке 2.4 представлена статическая характеристика регулятора.
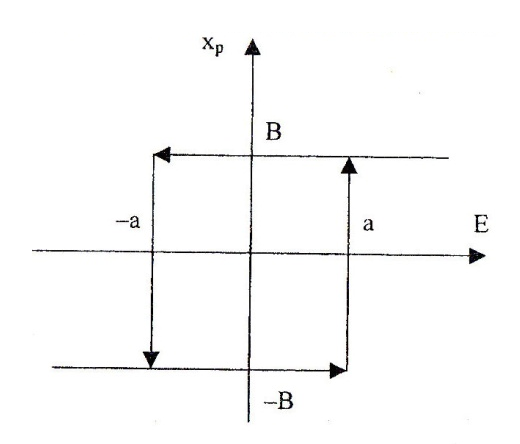
Рисунок 2.4 - Статическая характеристика регулятора
Ширина
зоны неоднозначности должна быть меньше
допустимых отклонений температуры в
помещении ![]() .
.
Регуляторы непрерывного действия - это регуляторы, у которых сигналы на входе и на выходе непрерывны во времени. Регуляторы непрерывного действия подразделяются на интегральные (И), или астатические; пропорциональные (П), или статические; пропорционально-интегральные (ПИ), или изодромные. Пропорционально-дифференциальные (ПД), или статические с предварением и пропорционально-интегрально-дифференциальные (ПИД), или изодромные с предварением. Дифференциальные уравнения, передаточные функции, частотные и временные характеристики, а также математические модели реальных регуляторов приведены в литературе [1,2,6,13].
Технические характеристики регуляторов температуры приведены в таблице П.3.