

2 Методика выполнения курсовой работы
2.1 Свойства объектов управления
Управляемый объект - основной элемент системы автоматического управления, в котором при помощи технических средств автоматизации осуществляется заданный алгоритм функционирования.
В состав объекта может входить набор машин для выполнения технологического процесса, а также внешняя среда, если она влияет на процесс управления. На объект действуют управляющие и возмущающие воздействия. Управляющие воздействия возникают в результате операций управления, которые стремятся приблизить процесс к заданному режиму работы.
Возмущающие воздействия, наоборот, удаляет процесс от заданного режима, стремятся вывести из установившегося состояния.
Чтобы обосновать выбор регулятора или управляющего устройства, необходимо знать статические и динамические характеристики объекта. Математическая модель может быть получена аналитическим или экспериментальным методом [1,2,3,12].
В основе аналитического исследования объектов управления лежит энергетический или материальный баланс. Для большинства объектов управления достаточно определения двух обобщенных координат, из которых одна характеризует поток вещества или энергию (входная), а другая (выходная) - параметр, определяющий результаты процесса. Такие объекты называют простыми одноемкостными объектами. Они могут быть описаны линейными дифференциальными уравнениями первого порядка, в которых третьей переменной является время. Виды дифференциальных уравнений, описывающих процессы, наиболее часто встречающиеся в сельскохозяйственном производстве в простых объектах управления приведены [1].
Процессы, протекающие в простых объектах управления, могут описаны в общем виде следующим выражением:
![]() ,
,
где L - часть объекта, неизменная во времени;
Y - управляемая величина;
X - входное воздействие.
На основании закона сохранения энергии можно записать, что
![]() ,
,
где Qп, Qр - входящие и выходящие потоки энергии или вещества.
Для
установившегося режима ![]() .
.
Если объект вывести из состояния покоя, появляется возмущение ΔQ:
![]() .
.
В общем случае входящий и выходящий потоки являются нелинейными функциями управляемой величины. Применив для их линеаризации разложение в ряд Тейлора, получаем:

где
![]() .
.
Обозначив
![]() и
и
![]() ,
получим уравнения в относительных
(безразмерных) единицах:
,
получим уравнения в относительных
(безразмерных) единицах:
 .
.
Разделив
это уравнение по ![]() и
перегруппировав составляющие, получим:
и
перегруппировав составляющие, получим:
![]() .
.
Обозначив
![]() - время
разгона, время, необходимое для заполнения
емкости объекта поступающим веществом
или энергией.
- время
разгона, время, необходимое для заполнения
емкости объекта поступающим веществом
или энергией.
![]() -
коэффициент самовыравнивания (безразмерная
величина).
-
коэффициент самовыравнивания (безразмерная
величина).
С учетом обозначения получим:
![]() .
.
Это уравнение было получено А. Стодолой.
Если
разделить уравнение Стодолы на (![]() ),
то получим стандартную форму
дифференциального уравнения объекта:
),
то получим стандартную форму
дифференциального уравнения объекта:
![]() ,
,
где
![]() - постоянное времени объекта;
- постоянное времени объекта;
![]() - коэффициент передачи объекта.
- коэффициент передачи объекта.
Передаточная функция объекта в операторской форме:
![]()
Проанализируем свойства одноемкостного объекта в зависимости от коэффициента самовыравнивания.
1)
![]() .
Объект называют статическим, устойчивым,
обладает свойством самовыравнивания;
.
Объект называют статическим, устойчивым,
обладает свойством самовыравнивания;
2)
![]() .
Объект не обладает свойством
самовыравнивания, и его принято называть
статическим неустойчивым объектом,
т.е. при отсутствии вмешательства извне
объект теряет управление;
.
Объект не обладает свойством
самовыравнивания, и его принято называть
статическим неустойчивым объектом,
т.е. при отсутствии вмешательства извне
объект теряет управление;
3)
![]() .
Объект лишен свойств самовыравнивания
и называется астатическим объектом.
Выходной параметр объекта управления
растет безгранично по линейному закону.
.
Объект лишен свойств самовыравнивания
и называется астатическим объектом.
Выходной параметр объекта управления
растет безгранично по линейному закону.
Теплотехнические объекты сельскохозяйственного назначения относится к статистическим объектам с самовыравниванием, имеющий S-образную характеристику.
Для
практических расчетов систем управления
такими объектами S-образную
кривую переходного процесса (см.рисунок
2.1) достаточно
охарактеризовать следующими параметрами,
определенными непосредственно по
графику: передаточным коэффициентом
![]() ,
постоянной времени
,
постоянной времени ![]() и полным запаздыванием
и полным запаздыванием ![]() .
.
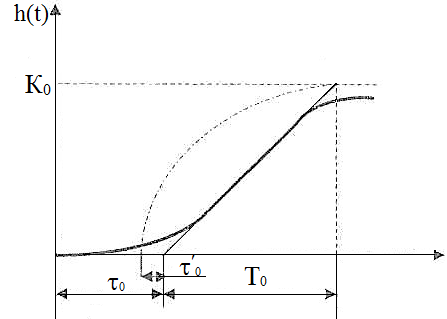
Рисунок 2.1 - Переходная характеристика объекта
S-образную характеристику можно заменить экспонентой с запаздыванием.
Передаточная функция объекта:
![]() .
.
Постоянную времени объекта и запаздывания объекта определяются из следующих выражений [6]:
![]() о;
о;
![]() .
.
При
выполнении курсового проекта не ставится
задача строгого определения параметров
объекта управления. Поэтому принимаем
упрощенную методику расчета характеристик
животноводческого помещения. Обобщенным
показателем является тепловая
характеристика помещения ![]() ,
которая определяется по формуле [1,13]:
,
которая определяется по формуле [1,13]:
 ,
(кДж/м3
°С ч),
,
(кДж/м3
°С ч),
где
![]() - суммарное количество теплоты кДж/ч;
- суммарное количество теплоты кДж/ч;
![]() - объем помещения, м3;
- объем помещения, м3;
![]() - температура внутри помещения, °С;
- температура внутри помещения, °С;
![]() - температура наружного воздуха, ºС.
- температура наружного воздуха, ºС.
Суммарное количество теплоты для отопления помещения можно вычислить из выражения:
![]()
Объем помещения вычисляется по формуле:
![]() ,
,
где
![]() -
удельный объем помещения, м3/гол.
-
удельный объем помещения, м3/гол.
Численные
значения, соответствующие
,
![]() ,
,
,
,
берутся из задания по курсовому
проектированию.
,
,
,
,
берутся из задания по курсовому
проектированию.
Коэффициент теплопотерь определяется по формуле:
![]() ,
(кДж/ч °С)
или
,
(кДж/ч °С)
или ![]() .
.
Теплоемкость животноводческого помещения определяем из формулы:
![]() ,
,
где
![]() -
удельная теплоемкость воздуха (
-
удельная теплоемкость воздуха (![]() ,
кДж/кг °С);
,
кДж/кг °С);
![]() -
плотность воздуха (
-
плотность воздуха (![]() кг/м3)
при температуре 20°С;
кг/м3)
при температуре 20°С;
![]() -
объем помещения, м3.
-
объем помещения, м3.
Постоянное времени животноводческого помещения определяется по формуле [12]:
![]() ,
час, или
,
час, или ![]() ,
мин.
,
мин.
Запаздывание в объекте можно вычислить
![]()
Конкретное
значение ![]() приведено в задании.
приведено в задании.
Для принятой модели объекта как последовательное соединение апериодического звена первого порядка и звена с чистым запаздыванием определяем передаточное
где
![]() -
коэффициент передачи объекта в
относительных единицах равен единице;
-
коэффициент передачи объекта в
относительных единицах равен единице;
- постоянное времени;
![]() –
запаздывание.
–
запаздывание.
Если в выражение для определения Тоб подставить выражение для определение А и С, то получим:
![]() час.
час.
Постоянное
времени для модели объекта (животноводческого
помещения) можно определить из значения
удельной тепловой характеристики
помещения в часах или ![]() в секундах.
в секундах.
Постоянное времени животноводческого помещения Т0 будет равно:
![]() или
или ![]() .
.