

Федеральное агентство по образованию
Белгородский государственный технологический университет им. В.Г.Шухова
Кафедра технологии машиностроения
Утверждено
научно- методическим
советом университета
Исследование погрешности позиционирования промышленного робота м10п-62.01. Практическое занятие №2.
Методические указания
к практическим занятиям
по дисциплине «Робототехника в ПСМ и изделий», «Роботы и РТК»
для студентов специальностей 150101, 270101
(очного и заочного отделения)
Белгород 2006
УДК 621
ББК
С
Составители: Бондаренко В.Б., канд. техн. наук, проф.
Погонин А.А. ,д.т.н., профессор
Рецензент: Калашников А.Т., канд. техн. наук, проф.
Исследование погрешности позиционирования промышленного робота :М10П-62.01: Методические указания. – Белгород: Изд-во БГТУ им. В.Г.Шухова, 2006.– 25с.
В настоящих методических указаниях приводятся основные сведения о промышленном роботе М10П-62.Приводится методике расчёта погрешности позиционирования
Издание предназначено для студентов специальностей 150101
©Белгородский государственный
технологический университет
(БГТУ) им. В.Г.Шухова, 2006
Исследование погрешности позиционирования промышленного робота м10п-62.01.
Промышленный робот (ПР) с числовым программным управлением модели М10П-62.01 предназначен для автоматизации загрузки – выгрузки деталей и смены инструмента на металлорежущих станках с ЧПУ. Промышленный робот устанавливается на станок, образуя с ним модуль (станок – промышленный робот), который может является базой для создания гибких производственных систем, предназначенных для продолжительной работы без участия оператора. Управление роботом и станком осуществляется от автономной системы управления.
1.Цель работы.
Изучить устройство, кинематику и пневмосистему промышленного робота и освоить методику исследования погрешности установки схвата в пределах рабочей зоны..
Содержание работы.
Основные технические характеристики и устройство пр
Прежде чем рассмотреть технические характеристики конкретного робота напомним некоторые общие положения о промышленных роботах.
Во-первых, ПР делятся на три типа: роботы первого типа – программируемые, способные работать по определенной программе, со сменой программоносителя меняются движения исполнительных органов робота; роботы 2 типа – адаптивные, которые имеют датчики обратной связи, обладают “зрением” и способны приспосабливаться, адаптироваться к условиям среды и к ее изменениям. И, наконец, роботы 3 типа – интеллектуальные. Которые вырабатывают оптимальные варианты решения при задании конечной цели роботы. Робот модели М10П-62.01 относится к роботам 1 типа, работающим по жестко заданной программе.
Промышленные роботы должны обеспечивать движение детали, находящейся в рабочем органе – руке по определенной программе, а, следовательно, обеспечить перемещение детали из одной позиции в другую, которые описываются определенными координатами. И вот возможности перемещения механической руки определяется ее структурой, видом и последовательностью расположения входящих в нее кинематических пар. Координаты перемещения руки ПР М10П-62.01 показаны на рис.2, согласно обозначениям на этом рисунке даются характеристики в таблице 1.
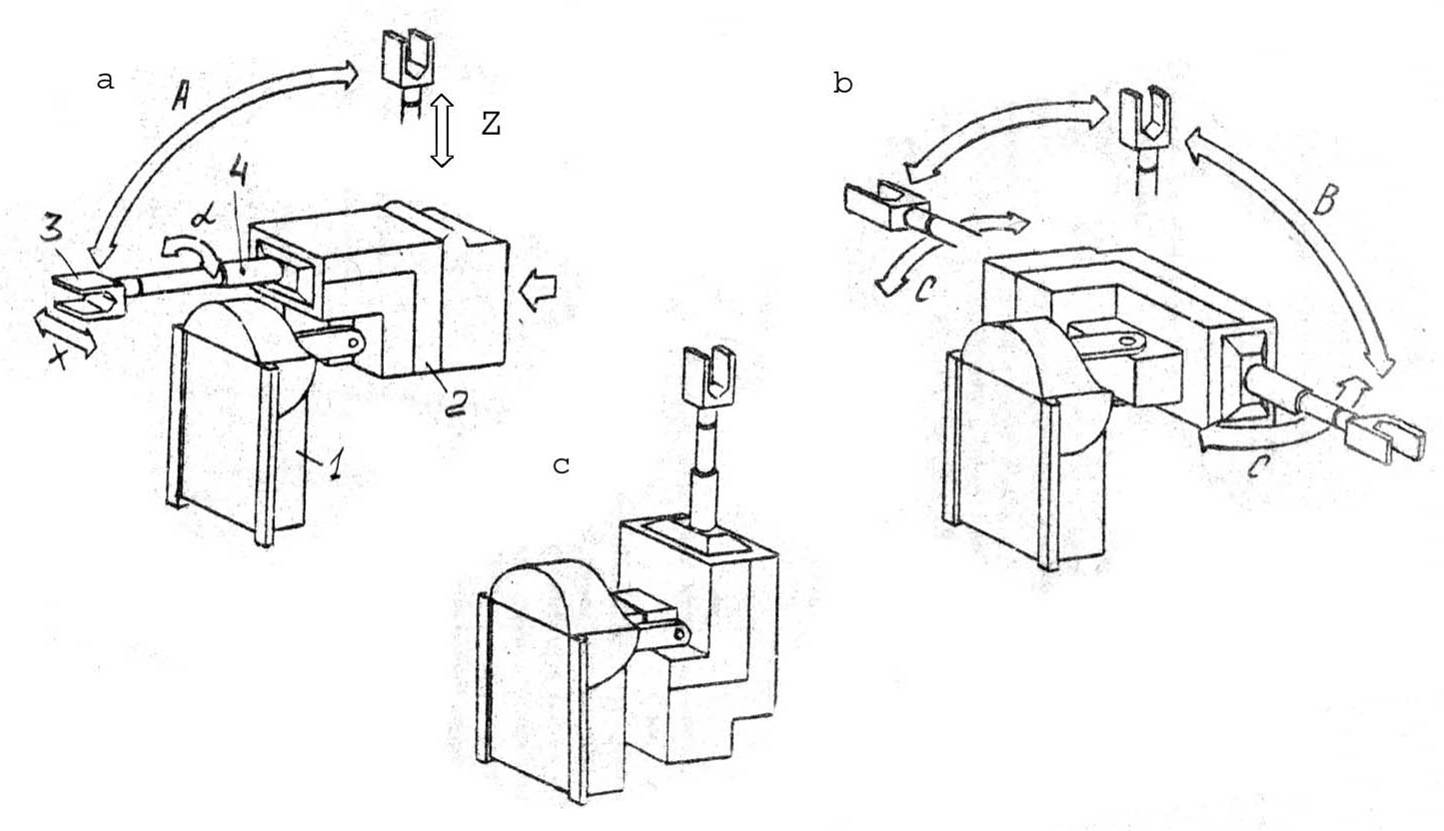
Рис.1.Компоновочная схема ПР М10П с указанием движений звеньев.
Промышленные роботы должны обеспечивать движение детали, находящейся в рабочем органе – руке по определенной программе, а, следовательно, обеспечить перемещение детали из одной позиции в другую, которые описываются определенными координатами. И вот возможности перемещения механической руки определяется ее структурой, видом и последовательностью расположения входящих в нее кинематических пар. Координаты перемещения руки ПР М10П-62.01 показаны на рис.2, согласно обозначениям на этом рисунке даются характеристики в таблице 1.
Таблица 1
Основные характеристики ПР М10П
![]()
N Пп |
Показатель |
Величина показателя |
1 2
3 4
5
6
7 8 9 10
11
12 13 |
Количество обслуживаемых станков, шт Грузоподъемность, кг номинальная полезная при установке одиночного захвата Погрешность позиционирования, мм Максимальные линейные перемещения, мм по координатам X, Z Максимальные угловые перемещения по координате, град. А С В
Диапазон скорости линейного перемещения, мм/с Число степеней подвижности Усилие захватывания, не менее, Н Время захватывания при полном ходе, с Диапазон размеров захватываемых деталей, мм по наружному диаметру по внутреннему диаметру Тип привода перемещений
Масса робота, кг Габаритные размеры робота, мм ширина длина высота |
1
20 10
150
90 120 180 90, 180, 270
0,008
6 810 2
20 150 38 168 Электрический координаты X, Z А, С, В Пневматический Координата 145
340 1238 751
|
Как видно на рис. 2 промышленный робот модели М10П-62.01 работает в сферических координатах, оснащен устройством программного управления с вводом программы пультообучения кассеты внешней памяти и от ЭВМ высшего ранга.
Расположение основных узлов и составных частей робота приведены на рис. 2. Основание 1 робота представляет собой алюминиевую отливку. На основании установлен электродвигатель постоянного тока со встроенным датчиком обратной связи. Механизм поворота и перемещения руки 2 обеспечивает рабочие движения исполнительных органов по координатам Z, X, A, C. Он состоит из привода перемещения по координатам Z, Х, включающий электродвигатель постоянного тока со встроенным датчиком обратной связи, коническую пару с передаточным отношением 1:2, винтовую девятизаходную пару. Для разгрузки винтовой девятизаходной пары служит шариковая направляющая. Кроме этого входит в механизм поворота и перемещения руки привод перемещений по координатам А, С, состоящий из электродвигателя постоянного тока, червячной пары.
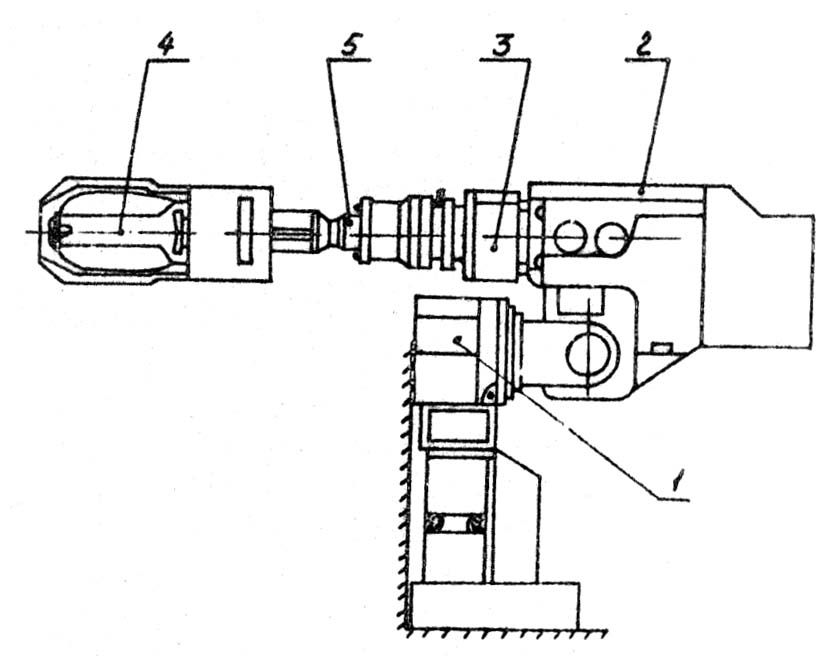 Рис.2 Общий
вид робота
Рис.2 Общий
вид робота
Поворотный блок
3 состоит из привода перемещений по
координате
,
в качестве которого используется
неполноворотный пневмодвигатель.
Имеется стопорный механизм, обеспечивающий
фиксацию поворотного блока в четырех
положениях (-90![]() ,
0
,
90 , 180
).
Конечные выключатели служат для контроля
положения останова.
,
0
,
90 , 180
).
Конечные выключатели служат для контроля
положения останова.
Механизм захвата 4 предназначен для захвата и удержания детали в процессе перемещения. При конструировании учитывают форму детали, определяющую конфигурацию губок. Захваты обычно выполняются быстросменными.
Втулка переходная 5 жестко соединяет механизм зажима с блоком поворота.