

2.Классификация систем автоматического управления.
Основными классификационными признаками систем автоматического управления являются: цель управления; характер информации об управляемом процессе или системе; способ управления; принцип формирования сигналов; характер зависимости выходных координат от входных. На рис.2 приведена классификационная схема САУ по указанным признакам.
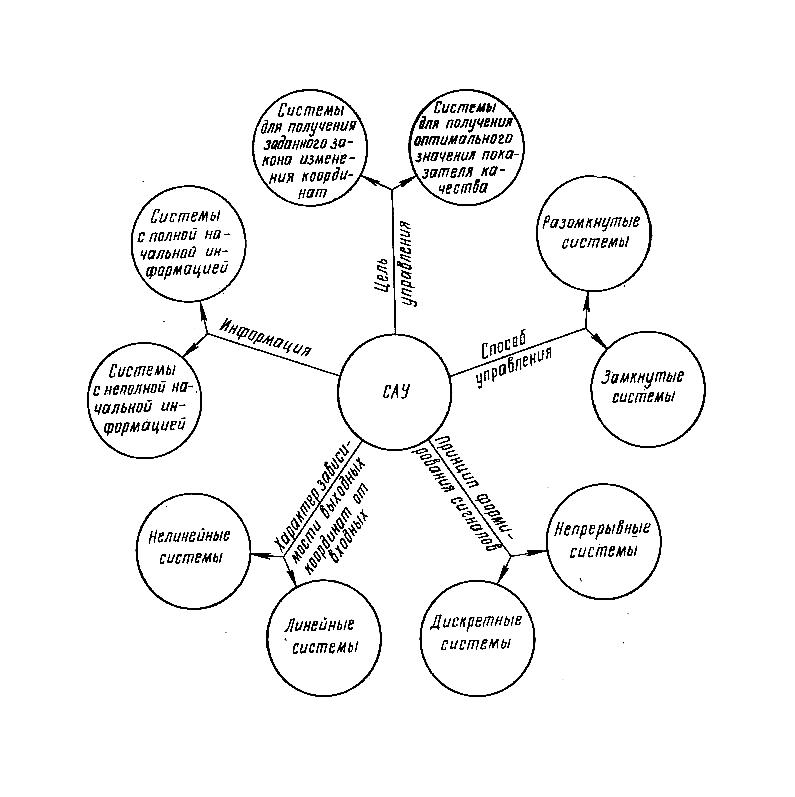
Рис.2 Классификационная схема САУ.
3.Законы регулирования.
В составе структуры САР содержится управляющее устройство, которое называется регулятором и выполняет основные функции управления, путем выработки управляющего воздействия.
Основным требованием, предъявляемым к автоматическим регуляторам, является обеспечение определенного качества регулирования, которое в первую очередь определяется законом регулирования.
Законом или алгоритмом регулирования называют математическую зависимость между выходной величиной регулятора (т.е. регулирующим воздействием) Y, и его входной величиной (т.е. отключением регулируемого параметра от заданного значения) X : Y(t)=f[X(t)].
Различают линейные и нелинейные законы регулирования. Кроме того, законы регулирования могут быть реализованы в непрерывном или цифровом виде.
3.1. Позиционный закон регулирования.
Позиционный закон регулирования реализуется позиционными регуляторами. Для позиционных регуляторов нет непрерывной функциональной зависимости между входной и выходной величинами. Для них закон регулирования описывается нелинейной характеристикой, подобной статической характеристике релейного элемента.
Промышленные позиционные регуляторы чаще всего выполняют на основе измерительных приборов, снабженных контактными устройствами. Поскольку статическая характеристика контактного устройства совпадает с характеристикой электромагнитных реле, то такие регуляторы также называют релейными.
Различают три основных типа позиционных регуляторов: двухпозиционные, у которых статическая характеристика соответствует двухпозиционному реле (рис.3.1,а и б), трехпозиционные (рис.3.1,в) и позиционные регуляторы с постоянной скоростью, которые имеют характеристику приведенную на (рис.3.1,г).
Двухпозиционный закон регулирования выражается уравнением:
![]() (3.1)
(3.1)
где B– регулирующее воздействие на объект; sign-знак сигнала.
У
двухпозиционных регуляторов регулирующее
воздействие может иметь лишь два
дискретных значения
![]() В,
поэтому процесс регулирования имеет
автоколебательный характер вокруг
заданного значения X0.
Когда регулируемая величина X
меньше заданной X0
с учетом зоны нечувствительности b,
регулирующее воздействие обеспечивает
максимальный приток энергии в объекте,
и значение регулируемой величины при
этом будет повышаться. После превышения
X заданного значения X0
на величину b, регулирующее
воздействие со
В,
поэтому процесс регулирования имеет
автоколебательный характер вокруг
заданного значения X0.
Когда регулируемая величина X
меньше заданной X0
с учетом зоны нечувствительности b,
регулирующее воздействие обеспечивает
максимальный приток энергии в объекте,
и значение регулируемой величины при
этом будет повышаться. После превышения
X заданного значения X0
на величину b, регулирующее
воздействие со
соответствует минимальному притоку энергии в объект. При этом значение регулируемой величины начнет уменьшаться до тех пор, пока не станет мень-

 Xвых
Xвых
Xвх
B Xвх
-b
 а) б)
а) б)
в)
Xвых
B
-b1
Xвх
-b2






b1
b2

г)
Рис.3.1. Релейные характеристики
ше заданного X0 на величину b. Далее процесс повторяется с постоянной амплитудой и периодом колебаний.
Преимущество позиционных регуляторов – простота и очень быстрое восстановление заданного значения параметра до установившихся колебаний. Наличие колебаний значительный недостаток регулирования. Поэтому такой способ управления применяют для технологических процессов, допускающих значительные колебания регулируемого параметра.
3.2.Пропорциональный закон регулирования (П-закон)
Регулятор, осуществляющий этот закон, называют пропорциональным, или статическим. У П-регулятора существует линейная зависимость между регулирующим воздействием и регулируемым параметром:
![]() (3.2)
(3.2)
где kp – коэффициент передачи регулятора.
Это значит, что при отклонении регулируемой величины от заданного значения регулятор одновременно и с пропорциональной скоростью воздействует на объект регулирования, стремясь вернуть ее к заданному значению.
Процесс регулирования П-регулятором характеризуется наличием статической ошибки (т.е. разницы между заданным и установившимся значением регулируемой величины).
Пропорциональный регулятор позволяет устойчиво регулировать работу почти всех промышленных объектов, но в системе регулирования всегда будет наблюдаться статическая ошибка, пропорциональная амплитуде возникшего возмущения.
Достоинством данного типа регулятора является высокое быстродействие.
3.3.Интегральный закон регулирования (И-закон).
Закон осуществляется интегральным (или астатическим) регулятором и характеризуется зависимостью:
![]() (3.3)
(3.3)
где Tи – постоянная времени интегрирования.
Уравнение (3.3) показывает, что скорость изменения регулирующего воздействия пропорциональна величине отклонения регулируемого параметра.
Регулирование И- регулятором связано с большими колебаниями, процесс регулирования протекает медленно, динамическая ошибка велика. В следствии этого интегральный регулятор может быть использован только при регулировании процессов в малоинерционных объектах. Основным достоинством И-регулятора является отсутствие статической ошибки регулирования.
3.4.Пропорционально-интегральный закон регулирования (ПИ- закон).
ПИ – закон реализуется пропорционально- интегральным регулятором и выражается следующим уравнением:
![]() (3.4)
(3.4)
Регулятор ПИ обеспечивает астатическое регулирование, сочетает достоинства пропорционального и интегрального регуляторов.
Оптимальный процесс регулирования обеспечивается правильно выбранными значениями коэффициентов kp и Tи. ПИ-регулятор наиболее распространен, применяется практически во всех САУ.
3.5.Пропорционально-дифференциальный закон регулирования (ПД-закон).
Мощным средством улучшения качества работы САР в переходном режиме является введение в закон регулирования производной от ошибки. В этом случае закон регулирования называется пропорционально-дифференциальным, реализуется ПД-регулятором и выражается следующим уравнением:
![]()
![]()
![]() (3.5)
(3.5)
где Тд –постоянная времени дифференцирования.
3.6. Пропорционально-интегрально-дифференциальный закон регулирования (ПИД-закон).
Закон регулирования реализуется ПИД- регулятором и выражается следующим уравнением:
![]() (3.6)
(3.6)
Усложнение закона регулирования позволяет повысить качество управления. ПИД-регулятор реагирует не только на то, какое значение имеет отклонение регулируемой величины в данный момент, но и на то, с какой быстротой оно будет возрастать или убывать. Регулятор работает как бы с опережением (предварением).
Наилучший эффект дает применение ПИД- регулятора в САУ с медленно изменяющимся регулируемым параметром.