

§6. Колебания систем с одной степенью свободы
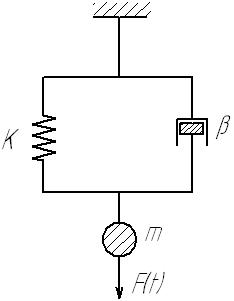
Рассмотрим механическую систему в виде груза массой m, висящую на пружине с жесткостью k и гидравлического демпфера с коэффициентом демпфирования β.
 Механическая
система имеет бесконечное число степеней
свободы, так как пружина – упругое тело
и перемещения ее частей должны
удовлетворять условию неразрывности
деформаций.
Механическая
система имеет бесконечное число степеней
свободы, так как пружина – упругое тело
и перемещения ее частей должны
удовлетворять условию неразрывности
деформаций.
Для исследования колебаний такой системы нужно ввести соответствие идеализации:
Будем считать, что груз может двигаться только в вертикальном направлении; массой пружины и демпфера по сравнению с массой груза можно пренебречь; начальное отклонение и скорость груза заданы.
Положение
груза, а следовательно и конфигурации
системы, определяется одной координатой
– его отклонением от положения равновесия,
а состояние системы – координатой груза
x и скоростью груза
 ,
поэтому при принятых идеализациях
система имеет одну степень свободы.
,
поэтому при принятых идеализациях
система имеет одну степень свободы.
Уравнение движения простых систем можно составлять на основании принципа Даламбера: «Решение задач динамики можно свести к решению задачи статики, если кроме действующих сил добавить фиктивную силу инерции равную произведению массы на ускорение и направленную в сторону противоположную ускорению».
Рассмотрим равновесие массы m, вырезанной из системы:
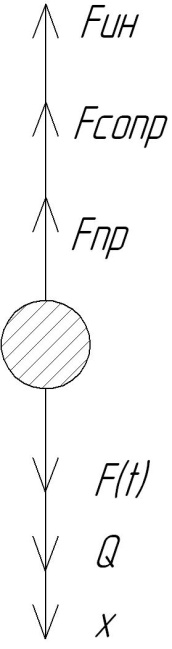
 фиктивная
сила инерции
фиктивная
сила инерции
 сила
вязкого сопротивления
сила
вязкого сопротивления
 восстанавливающая
сила
восстанавливающая
сила
 вес
груза
вес
груза

 (5)
(5)
линейное дифференциальное уравнение.
§7. Собственные свободные колебания линейных систем с одной степенью свободы
Положим,
что внешняя сила
 равна нулю и система, выведенная из
положения равновесия в начальный момент,
далее представлена самой себе. Такие
колебания называются собственными.
равна нулю и система, выведенная из
положения равновесия в начальный момент,
далее представлена самой себе. Такие
колебания называются собственными.
Введем еще одну идеализацию: положим, что сопротивление демпфера в механической системе равно нулю. Такие колебания называются свободными.
Исследование собственных свободных колебаний представляет важный практический интерес, так как характеристики этих колебаний (частоты и формы) полностью определяют индивидуальные динамические свойства механической системы и имеют первостепенное значение также и при анализе вынужденных колебаний.
Кстати, резонанс – явление неограниченного возрастания амплитуды вынужденных колебаний. Имеет место при совпадении частоты возмущающей силы с частотой собственных свободных колебаний.
 Итак,
Итак,
Задано:
 начальное
отклонение массы от положения статического
равновесия.
начальное
отклонение массы от положения статического
равновесия.
 начальная
скорость.
начальная
скорость.
 математическая
модель, описывающая собственные свободные
колебания системы с одной степенью
свободы.
математическая
модель, описывающая собственные свободные
колебания системы с одной степенью
свободы.
 тогда
тогда
 линейное
однородное дифференциальное уравнение
второго порядка.
линейное
однородное дифференциальное уравнение
второго порядка.
Решение:

где А и В - постоянные интегрирования, определяются из начальных условий задачи.
Итак,
Этому решению можно придать иную форму.
Положим,
 тогда
тогда

Справка:



В
этом решении
 фаза
колебаний,
фаза
колебаний,
 начальная
фаза,
начальная
фаза,
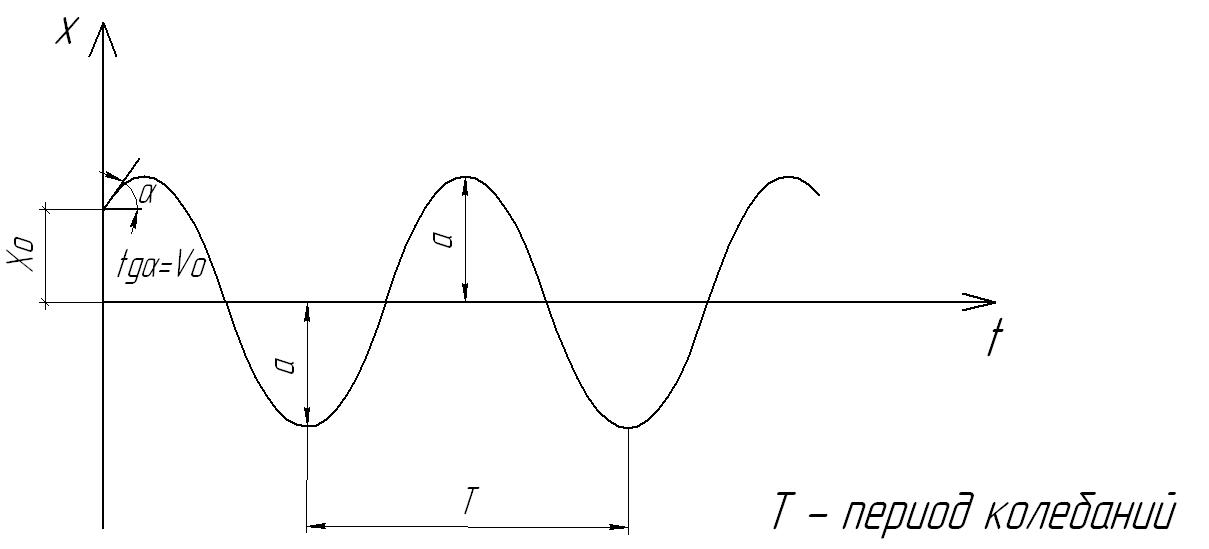
а - амплитуда колебаний (наибольшее отклонение груза от положения равновесия)
Так как sin- функция периодическая, то и движение груза относительно положения равновесия периодическое.
Аргументом
sin
является функция .
Такое движение называют гармоническим.
Промежуток времени T,
в течении которого груз совершает одно
полное колебание, называют периодом
колебаний.
.
Такое движение называют гармоническим.
Промежуток времени T,
в течении которого груз совершает одно
полное колебание, называют периодом
колебаний.
Груз
совершает полное колебание, если аргумент
изменяется
на .
.

где v – круговая частота колебаний – количество полных колебаний, которые совершает груз за секунд.

Вспомним,
что
 то
есть частота собственных свободных
колебаний не зависит от начальных
условий, а определяется только массой
груза и жесткостью пружины.
то
есть частота собственных свободных
колебаний не зависит от начальных
условий, а определяется только массой
груза и жесткостью пружины.
Рассмотрим еще линейную частоту, равную числу колебаний за 1 секунду, то есть величину обратную периоду Т колебаний.

Частоту
собственных свободных колебаний иногда
удобнее определить через
 удлинение
пружины, которое получается, если груз
свободно висит на ней:
удлинение
пружины, которое получается, если груз
свободно висит на ней:
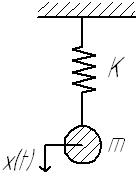
Пружину в механической системе можно заменить любым упругим телом, подчиняющимся закону Гука, если массой этого тела пренебречь.
Пример:
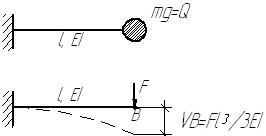

Сравним
выражение
 при
условии
при
условии
 эта
схема эквивалентна ранее рассматриваемой.
эта
схема эквивалентна ранее рассматриваемой.