

4. Синтез кулачковых механизмов
По исходным данным своего варианта:
- рассчитать паpаметpы диаграмм движения толкателя, вывести (если это необходимо для построения диаграмм) их уравнения и вычертить диаграммы;
- выбрать паpаметpы, необходимые для получения механизма наименьших pазмеpов (линейные pазмеpы, выбираемые проектировщиком, округлить до кратных 5 мм);
- вычертить профиль кулачка.
4.1. Исходные данные для исследуемых механизмов
Для проектируемого кулачкового механизма заданы:
1) Кинематическая схема и некоторые геометрические и кинематические параметры.
Схемы кулачковых механизмов и исходные данные
а) Механизм с движущимся поступательно роликовым толкателем
П ри
построении профиля кулачка должны быть
приняты во внимание заданные в таблице
направление угловой скорости ωк,
а также величина и направление
эксцентриситета e;
если величина e
не
задана, проектировщик согласовывает
ее выбор с выбором значения теоретического
минимального радиуса rminTтак,
чтобы получить кулачок наименьших
размеров.
ри
построении профиля кулачка должны быть
приняты во внимание заданные в таблице
направление угловой скорости ωк,
а также величина и направление
эксцентриситета e;
если величина e
не
задана, проектировщик согласовывает
ее выбор с выбором значения теоретического
минимального радиуса rminTтак,
чтобы получить кулачок наименьших
размеров.
Примечание: на схеме показаны положительные направления угловой скорости кулачка ωк и эксцентриситета e.
Таблица 1
Исходные данные для механизма
с движущимся поступательно роликовым толкателем
Наименование параметра |
Варианты исходных данных (последняя цифра студенческого билета) |
||||||||||
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
||
Ход толкателя H, мм |
40 |
42 |
45 |
47 |
50 |
40 |
42 |
45 |
47 |
50 |
|
Эксцентриситет e, мм |
10 |
-8 |
- |
0 |
- |
0 |
8 |
- |
-10 |
-8 |
|
Направление вращения кулачка |
+ |
- |
+ |
- |
+ |
- |
+ |
- |
+ |
- |
|
Наибольшие углы давления, градусы |
при подъеме αmaxп |
30 |
35 |
30 |
35 |
30 |
35 |
30 |
35 |
30 |
35 |
при опускании αmax0 |
40 |
45 |
40 |
45 |
40 |
45 |
40 |
45 |
40 |
45 |
|
б) Механизм с коромысловым роликовым толкателем
П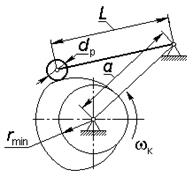 ри
построении профиля кулачка считать
заданным направление угловой скорости
кулачка ωк.
ри
построении профиля кулачка считать
заданным направление угловой скорости
кулачка ωк.
Длина коромысла L задана, а межосевое расстояние a и теоретический минимальный радиус rminT должны быть определены из условия минимизации размеров механизма.
Примечание: на схеме показано положительное направления угловой скорости кулачка.
Таблица 2
Исходные данные для механизма
с коромысловым роликовым толкателем
Наименование параметра |
Варианты исходных данных (последняя цифра студенческого билета) |
||||||||||
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
||
Ход толкателя Ψ, градусы |
28 |
32 |
36 |
28 |
32 |
36 |
28 |
32 |
36 |
30 |
|
Длина коромысла L, мм |
115 |
130 |
125 |
120 |
130 |
125 |
130 |
125 |
120 |
130 |
|
Направление вращения кулачка |
+ |
- |
+ |
- |
+ |
- |
+ |
- |
+ |
- |
|
Наибольшие углы давления, градусы |
при подъеме αmaxп |
30 |
35 |
30 |
35 |
30 |
35 |
30 |
35 |
30 |
35 |
при опускании αmax0 |
40 |
45 |
40 |
45 |
40 |
45 |
40 |
45 |
40 |
45 |
|
в )
Механизм с движущимся поступательно
плоским толкателем
)
Механизм с движущимся поступательно
плоским толкателем
При построении профиля кулачка учесть направление и величину эксцентриситета e, угла передачи γ, а также направление угловой скорости ωк; если значение e не задано, его нужно подобрать так, чтобы точка Р крепления тарелки к штоку располагалась примерно посередине ее рабочей длины.
Примечание: на схеме показаны положительные направления угловой скорости кулачка ωк и эксцентриситета e.
Таблица 3
Исходные данные для механизма
с движущимся поступательно плоским толкателем
Наименование параметра |
Варианты исходных данных (последняя цифра студенческого билета) |
|||||||||
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
Ход толкателя H, мм |
40 |
42 |
45 |
47 |
50 |
40 |
42 |
45 |
47 |
50 |
Эксцентриситет e, мм |
10 |
- 8 |
- |
0 |
- |
8 |
-10 |
0 |
- |
- |
Угол передачи γ, градусы |
90 |
90 |
90 |
90 |
90 |
90 |
70 |
110 |
110 |
70 |
Направление вращения кулачка |
+ |
- |
+ |
- |
+ |
- |
+ |
- |
+ |
- |
Таблица 4
Выбор схемы механизма
Вариант |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
0 |
Предпоследняя цифра студенческого билета |
||||||||||
Схема механизма |
а |
б |
в |
а |
б |
в |
а |
б |
в |
а |
2) Фазовые углы поворота кулачка:
φп - за время подъема толкателя;
φвв - за время верхнего выстоя толкателя;
φо - за время опускания толкателя.
Таблица 5
Фазовые углы поворота кулачка
Вариант |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
0 |
Последняя цифра студенческого билета |
||||||||||
φп |
160 |
150 |
100 |
180 |
120 |
180 |
210 |
100 |
100 |
180 |
φвв |
30 |
30 |
75 |
20 |
80 |
0 |
10 |
50 |
100 |
60 |
φо |
140 |
150 |
80 |
160 |
90 |
90 |
140 |
150 |
100 |
90 |
3) Закон движения толкателя.
Таблица 6
Законы изменения модуля аналога ускорения aφ
(или аналога углового ускорения εφ)
-
Законы изменения модуля
Вариант
За время подъема
Вариант
За время опускания
Предпоследняя цифра студенческого билета
0
Рис. 4.1а
Последняя цифра студенческого билета
9
Рис. 4.2
1
Рис. 4.1б
8
Рис. 4.3
2
Рис. 4.2
7
Рис. 4.4
3
Рис. 4.3
6
Рис. 4.5
4
Рис. 4.4
5
Рис. 4.6
5
Рис. 4.5
4
Рис. 4.7
6
Рис. 4.6
3
Рис. 4.1а
7
Рис. 4.7
2
Рис. 4.1б
8
Рис. 4.1а
1
Рис.4.3
9
Рис. 4.1б
0
Рис.5.6
На рисунках. 1 - 7 приведены законы движения.
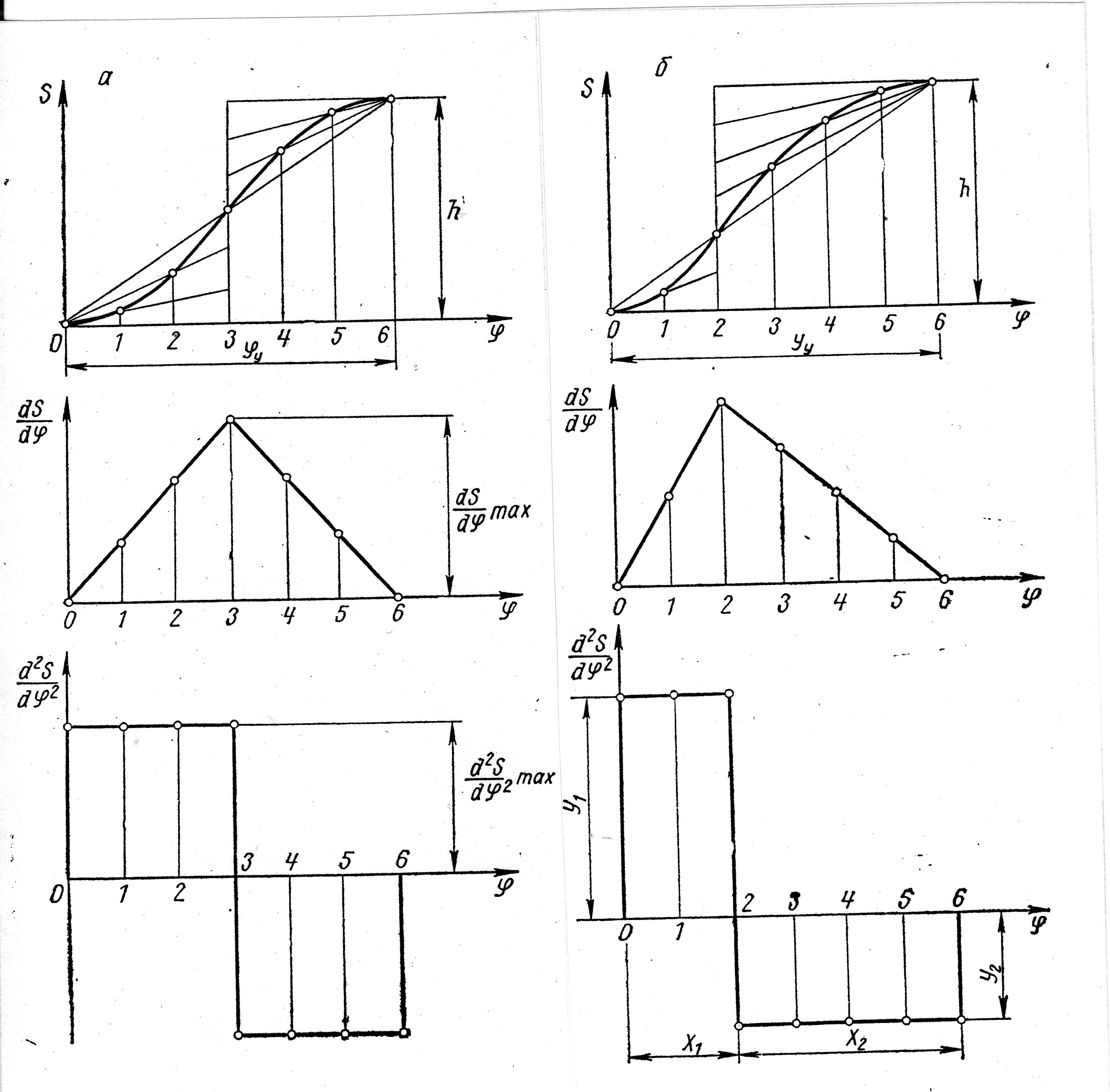
Рис. 4.1 Закон постоянного ускорения:
а) с одинаковыми участками разгона и замедления,
б) с неодинаковыми участками разгона и замедления
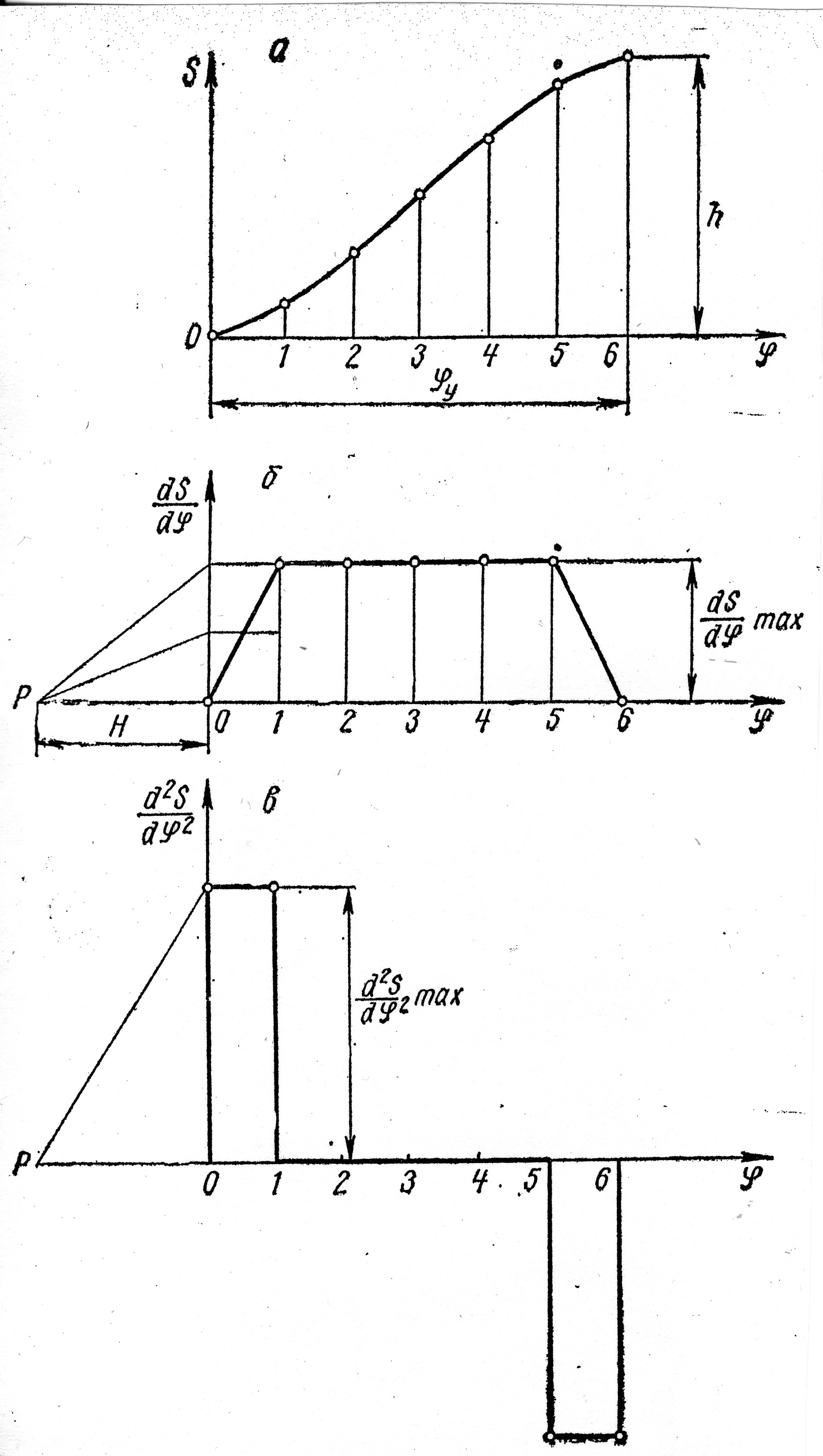
Рис. 4.2. Модифицированный линейный закон
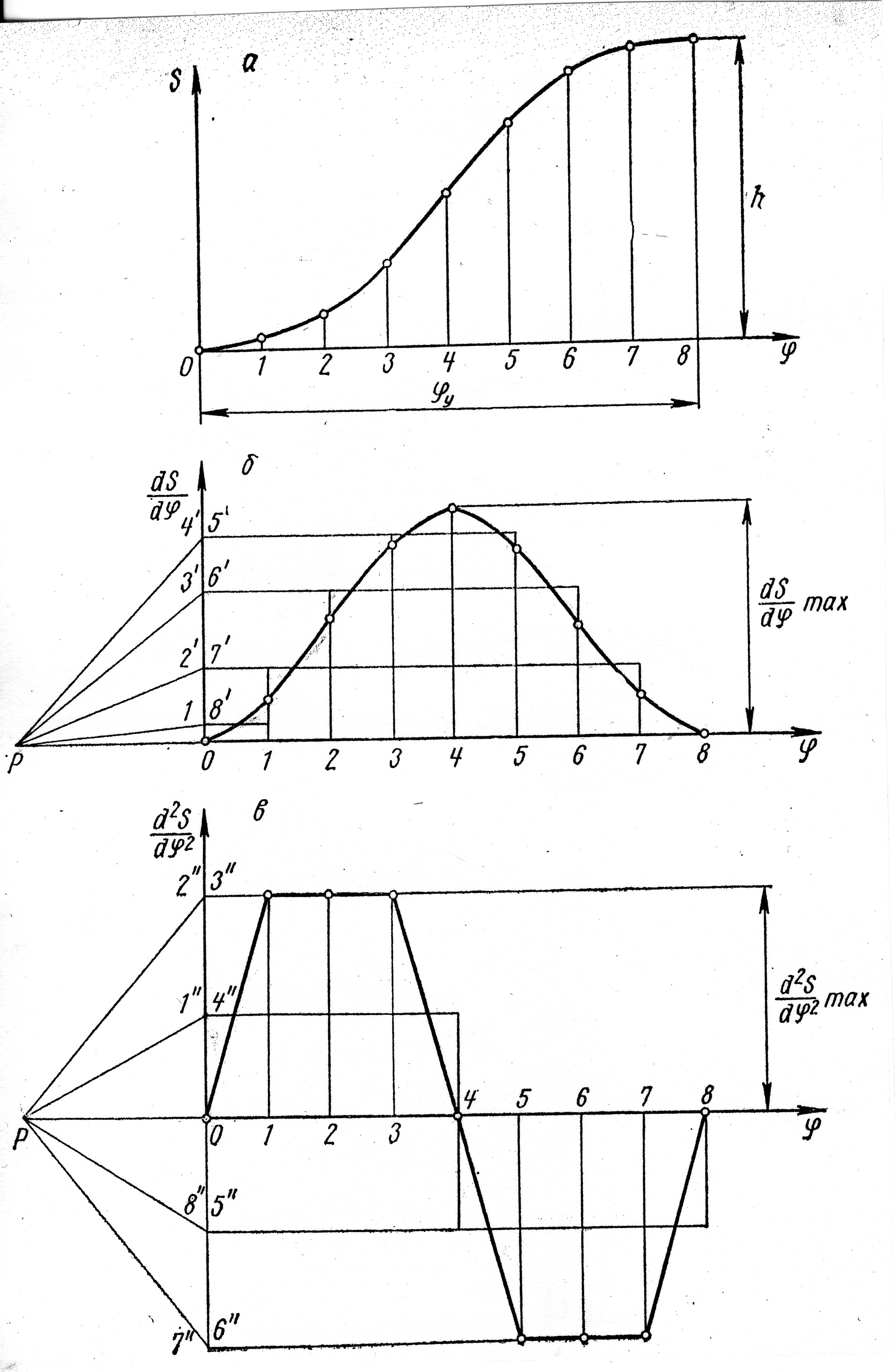
Рис. 4.3. Трапецеидальный закон
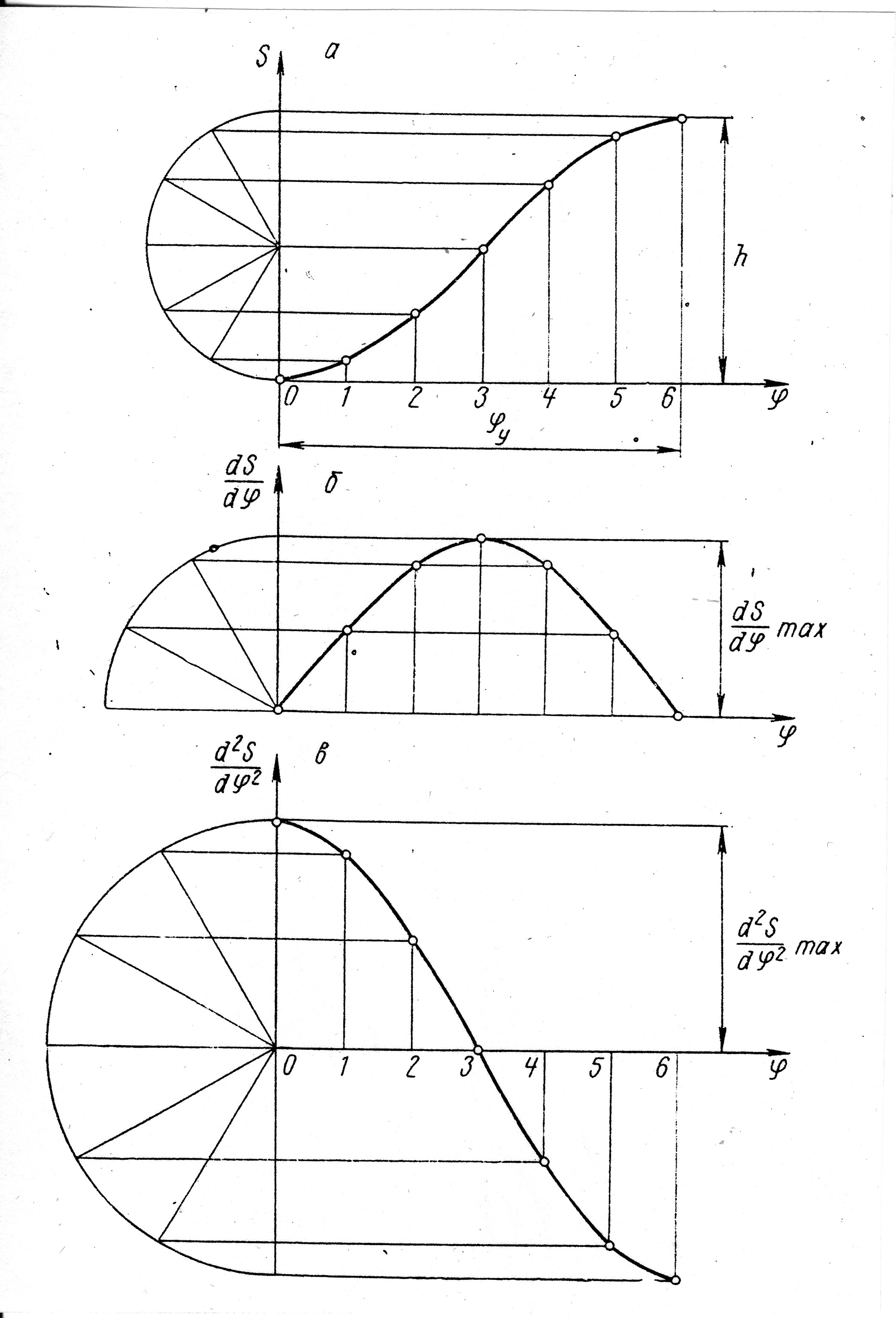
Рис. 4.4. Закон изменения ускорения по косинусоиде
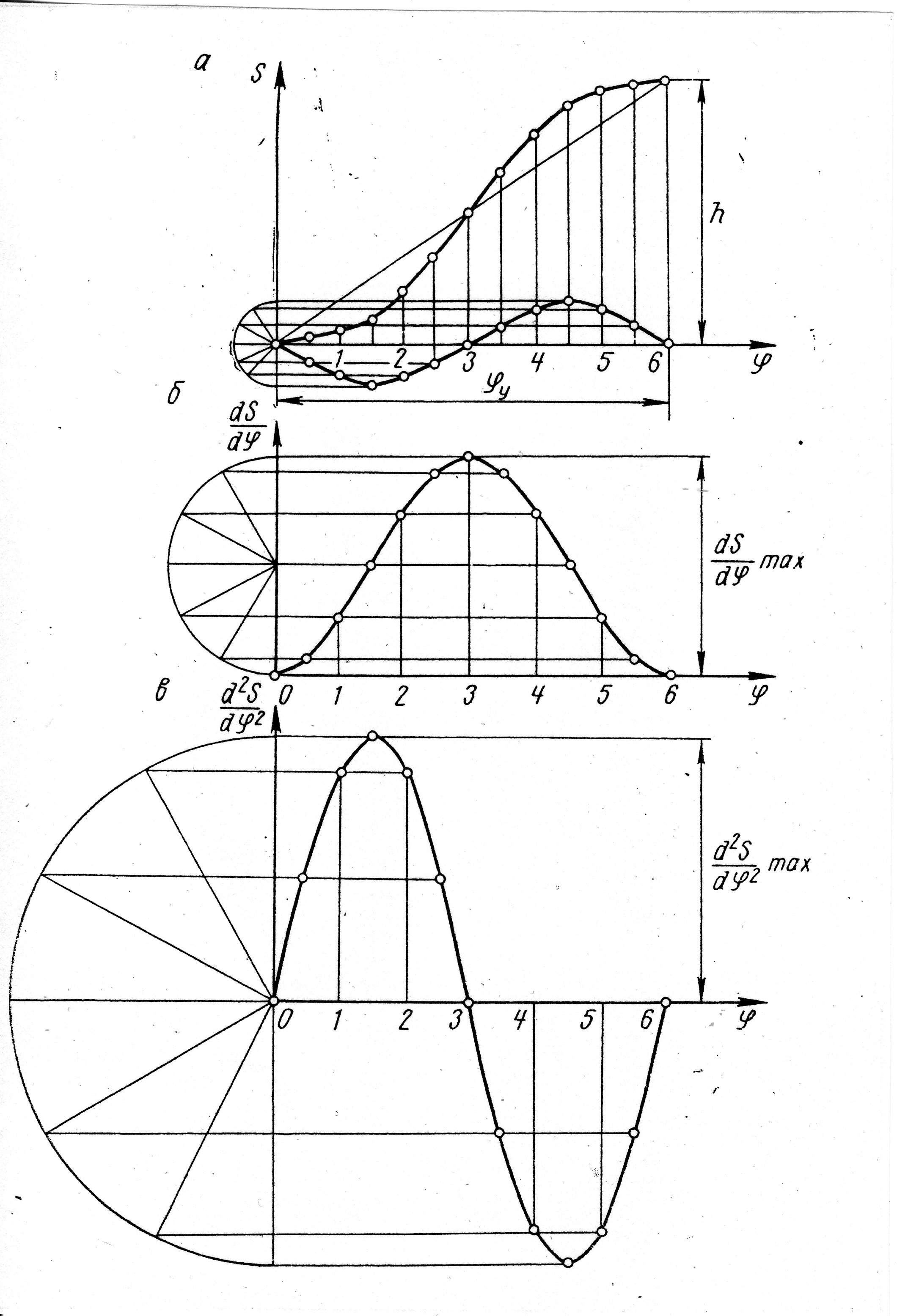
Рис. 4.5. Закон изменения ускорения по синусоиде
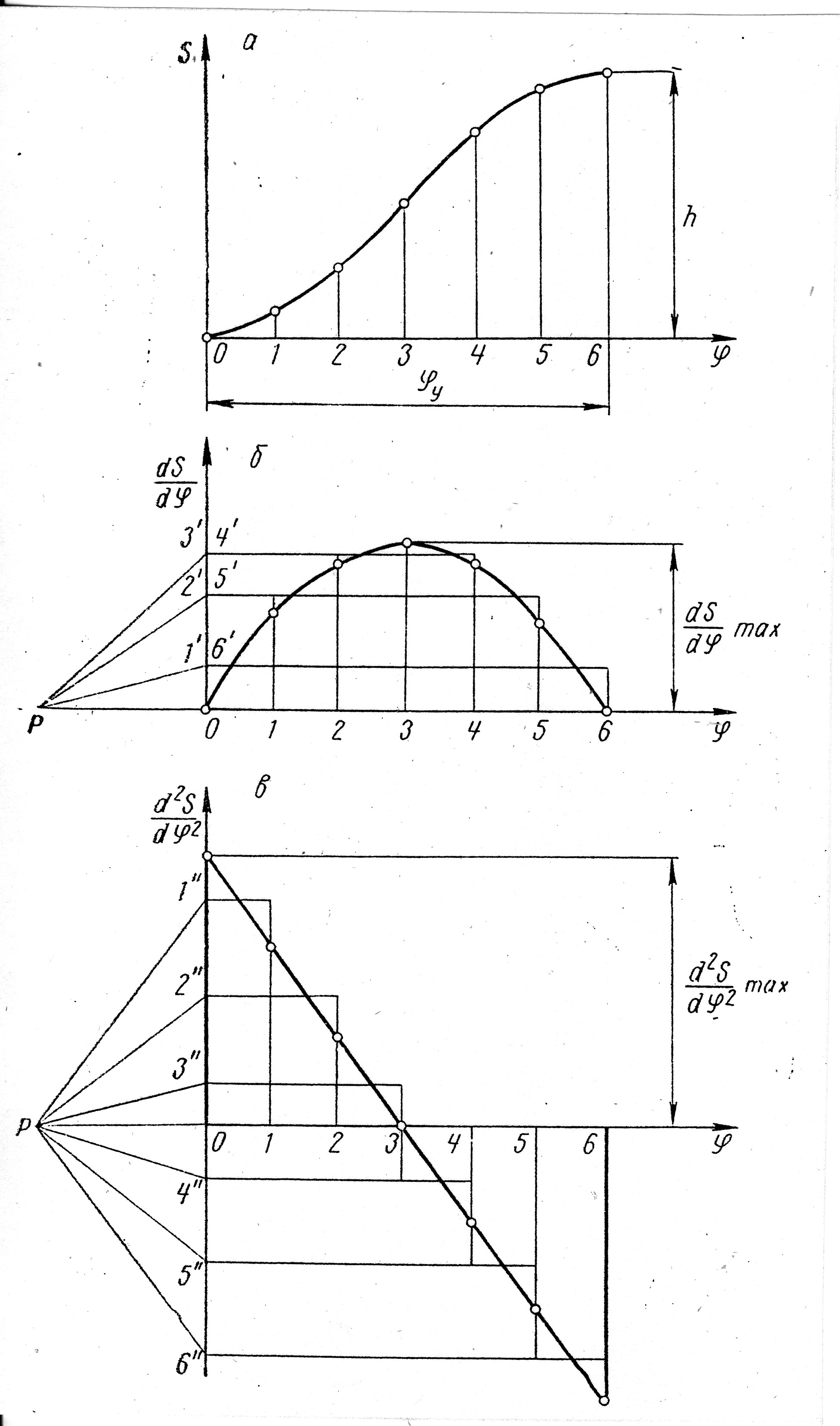
Рис. 4.6. Линейно-убывающий закон
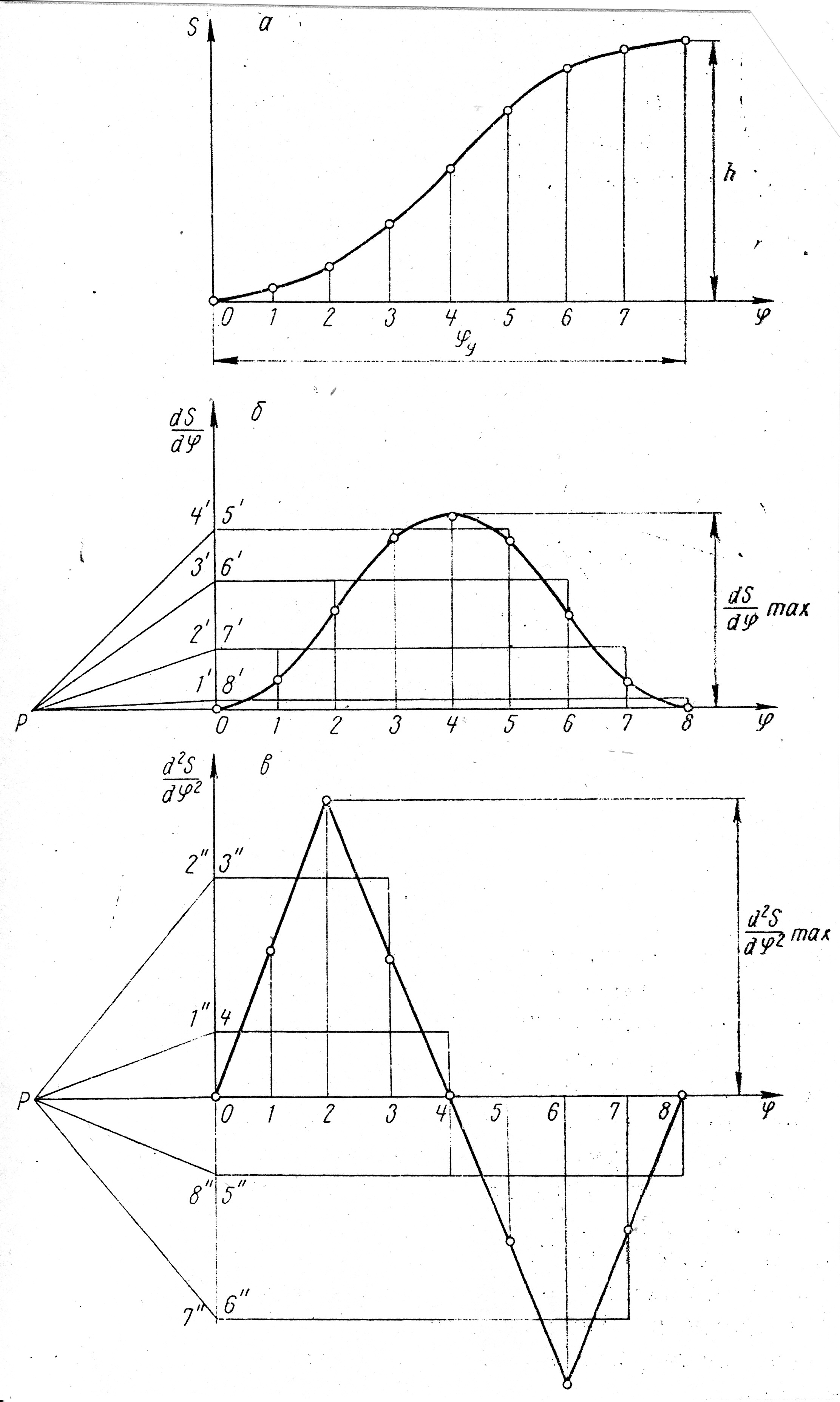
Рис. 4.7. Закон изменения ускорения по треугольнику