

Основні види вимірювальних механізмів
Магнітоелектричні ВМ. Існують два основні різновиди магнітоелектричних вимірювальних механізмів: з рухомою котушкою (рамкою) і нерухомим магнітом (зовнішнім або внутрішнім) та з рухомим магнітом і нерухомою котушкою.
Будову магнітоелектричного механізму з
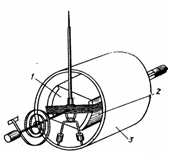
Рис. 2.5. Магнітоелектричний ВМ з внутрішньорамковим магнітом
Рис. 2.6. Магнітоелектричний ВМ з внутрішньорамковим магнітом
рухомою рамкою зображено на рис.2.5. В таких механізмах рамка 6 повертається у вузькому проміжку, утвореному магнітопроводом 2 з полюсними наконечниками 8 та осердям 4, виготовленими з магнітом'якого феромагнітного матеріалу. Магнітний потік постійного магніту 1, замикаючись через полюсні наконечники та осердя, проходить у робочому проміжку в радіальному напрямку і утворює там рівномірно-радіальне поле.
Струм до рухомої рамки підводять з допомогою двох спіральних пружин (у механізмах на розтяжках і підвісові – з допомогою розтяжок або підвісу і так званого безмоментного струмопідводу – тонкої пружини з практично незначним протидіючим моментом).
Обертаючий момент Мо утворюється в таких механізмах внаслідок взаємодії струму і в обмотці рухомої рамки з полем постійного магніту:
 , (2.18)
, (2.18)
де В – індукція в зазорі;
S – площа рамки;
w – кількість витків обмотки рамки.
Заспокоєння коливань рухомої частини утворюється головним чином за рахунок вихрових струмів, що виникають у короткозамк-нутому контурі алюмінієвого каркасу рамки при його переміщенні в магнітному полі. Це – каркасне магнітоіндукційне заспокоєння. Заспо-коєння може здійснюватися і за рахунок струмів, що виникають в обмотці рамки від наведеної там при переміщенні рамки електрору-шійної сили. Це – обмоткове магнітоіндукційне заспокоєння, яке використовують в механізмах високої чутливості (гальванометрах). Рамки в таких механізмах виготовляють безкаркасними. Різновидом вимірювального механізму з рухомою рамкою є механізм з внутрішньорамковим магнітом (рис.2.6). Магнітна система такого механізму складається з постійного магніту 1, полюсних накладок 2 і ярма 3.
Застосовують також магнітоелектричні вимірювальні механізми з рухомим магнітом. При проходженні через нерухомі котушки ефект-ричного струму рухомий магніт такого механізму намагається зайняти положення, при якому вісь його намагнічування співпадала б з напрямком магнітного поля котушок, внаслідок чого і виникає обертаючий момент. Недоліком механізмів з рухомим магнітом є порівняно слабке власне магнітне поле, низька точність. Механізми з рухомим магнітом мають простішу конструкцію, менші розміри і більш стійкі до перевантаження порівняно з механізмами із рухомою рамкою.
Електромагнітні ВМ. Існує декілька різновидів електромагнітних ВМ. Електромагнітний механізм з плоскою котушкою подано на рис. 2.7, а. При про-ходженні електричного струму через обмотку 1 всередині котушки утворюється магнітне поле. Під дією цього поля феромагнітне осердя 2, що ексцентрично закріплене на осі, втягуватиметься всередину котушки.
На рис. 2.7,б, зображено електромагнітний вимірю-вальний механізм з круглою котушкою, який складається з нерухомої круглої котушки 1, всередині якої знаходяться нерухоме 2 (закріплене на котушці) та рухоме 3 (закріплене на осі) осердя. Якщо в обмотці котушки проходить струм, то обидва осердя намагнічуються однойменно і відштовхуються одне від одного, утворюючи обертаючий момент.
Широко застосовуються електромагнітні ВМ з магнітопроводом (рис. 2.7,в). У таких механізмах магнітний потік, що утворюється нерухомою котушкою 1 при проходженні по ній струму, замикається головним чином через магнітопровід. Останній складається із неру-хомого осердя 2 та полюсних наконечників 3 і 5, між якими знаходиться рухомий елемент 4. Необхідне значення обертаючого моменту в таких механізмах можна дістати при значно меншому споживанні енергії.
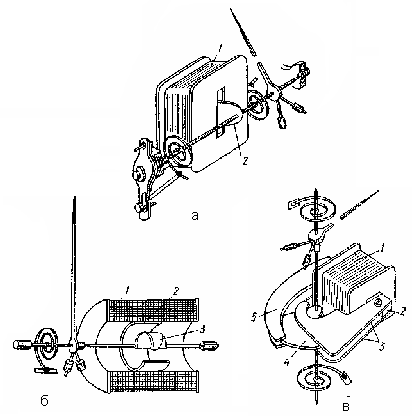
Рис. 2.7. Різновиди електромагнітних ВМ
Обертаючий момент такого механізму:
 .
(2.19)
.
(2.19)
B електромагнітних ВМ з плоскою й круглою котушками застосовують повітряні заспокоювачі, а в механізмах з магнітопроводом – крапельно-рідинні.
Електродинамічні та феродинамічні ВМ. Будова електроди-намічного ВМ зображена на рис. 2.8. Механізм має нерухому котушку 1, виконану у вигляді двох секцій, між якими проходить наскрізна вісь із закріпленою на ній рухомою котушкою 2. Якщо через котушки проходять струми відповідно і1 та і2 то:
де L1, L2 – індуктивності нерухомої та рухомої котушок; М12 – взаємна індуктивність між ними.

Рис. 2.8. Електродинамічний ВМ
 ,
(2.20)
,
(2.20)
Індуктивності L1 і L2 не залежать від кута повороту рухомої частини, тому обертаючий момент:
 .
(2.21)
.
(2.21)
Залежність
 від кута повороту визначається формою,
розмірами та взаємним розміщенням
рухомої і нерухомої котушок. Бажаної
форми шкали електро-динамічного ВМ
досягають зміною характеру цієї
залежності. Феродинамічні ВМ (рис. 2.9)
за принципом дії становлять одну групу
з електродинамічними, але відрізняються
від них конструктивно.
від кута повороту визначається формою,
розмірами та взаємним розміщенням
рухомої і нерухомої котушок. Бажаної
форми шкали електро-динамічного ВМ
досягають зміною характеру цієї
залежності. Феродинамічні ВМ (рис. 2.9)
за принципом дії становлять одну групу
з електродинамічними, але відрізняються
від них конструктивно.
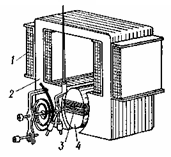
Рис. 2.9. Феродинамічний ВМ
Нерухомі котушки 1, розміщені на магнітопроводі 2, виго-товленому із листового магнітом’якого матеріалу. Безкаркасна рухома рамка 3, розміщена у вузькому робочому проміжку, утвореному магнітопроводом і осердям 4.
Наявність магнітопроводу призводить до значного збільшення обертаючого моменту і зменшення впливу зовнішніх магнітних полів.
Електростатичні ВМ. В електростатичних вимірювальних механізмах для переміщення рухомої частини використовується енергія електростатичного поля рухомих і нерухомих електродів, що перебувають під напругою U та утворюють конденсатор ємністю С, значення якої змінюється при переміщенні рухомої частини.
Залежно від способу зміни ємності розрізняють два основні типи електростатичних вимірювальних механізмів: механізми із змінною активною площею електродів і механізми із змінною відстанню між електродами. У механізмах першого типу (рис. 2.10) нерухомі електроди 2 виготовляють у вигляді однієї або кількох камер, всередині яких розміщуються рухомі електроди 1. Якщо між рухомими та нерухомими електродами існує різниця потенціалів, то на рухому частину діє обертаючий момент:
 , (2.22)
, (2.22)
тобто відхилення рухомої частини електростатичного вимірювального механізму пропорційне квадрату прикладеної напруги.
На рис.2.11, зображено електростатичний ВМ із змінною відстанню між електродами. Між двома нерухомими 1 і 3 знаходиться рухомий електрод 2, підвішений на тонких бронзових стрічках. Напруга підводиться до нерухомих електродів, а рухомий електрод з'єднується електрично з одним із них. При такій схемі з'єднань однойменно заряджені електроди будуть відштовхуватись, а різнойменно – притягуватись. Обертаючий момент пропорційний квадрату прикладеної напруги та зміні ємності між електродами. Протидіючий момент утворюється за рахунок сили тяжіння рухомого електрода і пружності підвісів.
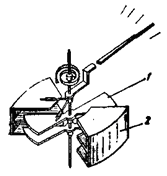
Рис. 2.10. Електростатичний ВМ зі змінною активною площею електродів
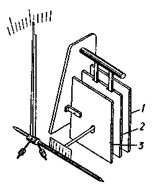
Рис. 2.11. Електростатичний ВМ із змінною відстанню між електродами
Вимірювальні механізми із змінною відстанню між електродами використовують лише в кіловольтметрах, а механізми із змінною активною площею, як більш чутливі, також і у вольтметрах.
Індукційні ВМ. Індукційними називаються вимірювальні механізми, переміщення рухомої частини яких здійснюється внаслідок взаємодії змінних магнітних потоків зі струмами, що наведеними в активному елементі рухомої частини. Найпоширеніші індукційні механізми з рухомим диском. Такий механізм має два незалежні магнітопроводи (рис.2.12), магнітні потоки яких перетинають диск і наводять у ньому вихрові струми.

Рис. 2.12. Індуктивний ВМ
Миттєве
значення обертаючого моменту, що
утворюється в індукційному механізмі
внаслідок взаємодії потоку
 і вихрового струму
і вихрового струму
 ,має
вигляд:
,має
вигляд:
 ,
(2.23)
,
(2.23)
де k1 – коефіцієнт пропорційності.
Середнє значення цього моменту за період:
 (2.24)
(2.24)
На основі виразу та спрощеної векторної діаграми, побудованої в припущенні, що опір диска чисто активний момент потоку Ф1(Ф2) і струму І2(І1):
 (2.25)
(2.25)
 (2.26)
(2.26)
Протилежність знаків для моментів М1 та M2 зумовлена тим, що один контур втягується, а другий виштовхується з магнітного поля. Напрямки дії обох моментів збігаються і результуючий обертаючий момент дорівнює їх сумі.
Враховуючи, що струми, наведені в активному елементі рухомої частини, відповідно дорівнюють I1=C1Ф1; І2=С2Ф2 (С1 і С2 – коефіцієнти пропорційності), результуючий обертовий момент можна подати у вигляді:
 (2.27)
(2.27)
Застосовують індукційні ВМ головним чином як інтегруючі. В інтегруючих ВМ протидіючий момент відсутній, і при обертанні рухомої частини на неї діє лише гальмівний момент Мг. Останній утворюється внаслідок взаємодії потоку Фм постійного магніту із струмом Ім, що наводиться в диску при його обертанні:
 (2.28)
(2.28)
Нехтуючи тертям, можна вважати, що рівномірна швидкість обертання диска наступить з рівновагою обертаючого та гальмівного моментів, тобто:
 (2.29)
(2.29)
звідки протягом часу t2=t1:
 (2.30)
(2.30)
а число обертів диска:
 .
(2.31)
.
(2.31)
Інтегруючі індуктивні ВМ застосовують в лічильниках електричної енергії.