

Реализація операції віднімання
Вихідні дані
тип арифметичної операції —віднімання двійкових чисел;
вхідний код представлення операндів — додатковий;
розрядність операндів — 8 біт;
код виконання перації в суматорі — додатковий модифікований;
структура операційного блоку — з закріпленими мікроопераціями;
тип керуючого блоку — автомат Мілі с памятю на D -тригерах;
схема логічної ознаки переповнення розрядної сітки;
схема логічного порозрядного множення кодів вхідних операндів А і В.
Алгоритми віднімання двійкових чисел
Алгоритм віднімання двійкових чисел реалізується в наступній послідовності:
в регістри RGA і RGB з вхідної шини один за одним паралельним кодом записуються відповідні їм операнди А і В;
операнди В безумовно інвертується;
мікрооперація віднімання виконується в додаткових модифікованих кодах на протязі одного машинного такту;
аналізується результат розрахунку. При відсутності переповнення розрядної сітки результат записується в регістр RGС і потім пересилається в оперативну пам'ять, при наявності переповнення – результат не фіксується і в ЦПК передається сигнал переповнення Тn.
Функціональная схема АЛП для виконаня операції віднімання
Схема АЛП містить ;
регистри RGA і RGB для приймання і наступного зберігання на протязі виконання мікропрограми з вхідної шини Ш1 операндів А і В;
схему інвертування BIN з вмістом регістру RGB;
електронні ключі SW1 і SW2 для комутації операндів;
схему порозрядного логічного множення;
комбінаційний суматор SM с з додатковим старшим розрядом знаку П для створення модифікованого додаткового коду. На вхід переносу розряду суматора подається логічна одиниця;
регистр результату RGC;
схеми виробітку ознак переповнення ПР;
модуль керуючого блоку МБК на основі автомату Мілі з памятю на D-триггерах.
Мікропрограми віднімання
Мікропрограма віднімання двійкових чисел в модифікованих додаткових кодах має наступний вид:
Початок, якщо K[1], то М1 iнакше – чекати
М1 у1: RGA := 101 <прийому першого операнда>
y2: RGB := 100 <прийому другого операнда>
у3: SM:= 101 + 100 + 1 <мікрооперація віднімання в додаткових кодах>
Якщо <φ3, то M2 інакше
y4: RGC := SM <присвоєння результату>
у5: Ш2 := RGC <пересилка в пам'ять>
Перейти М3
M2 y6 :Тп:= ПП <тригеру переповнення Тп присвоюється признак ПП>
М3 Кінець.
Примітка. К[1] – однорозрядний код команди віднімання

Рисунок Б.5. Змістовний а) і закодований б) графи мікропрограми віднімання
Додаток г
Приклад проектування модуля блока керування
Проектування модуля блоку керування (МБК) на основі автомату Мура з памятю на JK-триггері виконується в наступній послідовності:
Розмічається закодований граф мікропрограми додавання (рисунок В.1.). Визначається максимальна кількість станів автомату Мура, що дорівнює L = 7. Для реалізації такого числа станів необхідно використовувати n = ]log27[ = 3 триггера.
На основі розміченого графу мікропрограми будується граф автомату Мура (рис. 1.5), який інтерпретує мікропрограму додавання.
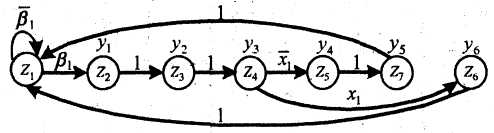
Рисунок В.1. 5. Граф автомата Мура для мікропрограми додавання
Стан автомату Мура кодується значеннями виходів JK-триггерів
![]()
На основі графа автомата Мура записується його структурная таблиця переходів (табл. 1.1).
Таблиця В.1 – Структурна таблиця переходів автомату Мура
zi |
k(zi) |
zj |
k(zj) |
{ xi } |
{ yi } |
JK |
|
K |
J |
||||||
z1 |
000 |
z1 |
000 |
не β1 |
- |
- |
- |
z2 |
001 |
β1 |
y1 |
- |
J1 |
||
z2 |
001 |
z3 |
010 |
1 |
y2 |
K1 |
J2 |
z3 |
010 |
z4 |
011 |
1 |
y3 |
- |
J1 |
z4 |
011 |
z5 |
100 |
не xi |
y4 |
K2, K1 |
J3 |
z6 |
101 |
xi |
y6 |
K2 |
J3 |
||
z5 |
100 |
z7 |
110 |
1 |
y5 |
- |
J2 |
z6 |
101 |
z1 |
000 |
1 |
- |
K3, K1 |
- |
z7 |
110 |
z1 |
000 |
1 |
- |
K3, K2 |
- |
На основі даних табл. В.1 записуються системи логічних рівнянь для функцій збудження входів JK-триггерів і виходів:
Для функцій збудження входів:

Для вихідних сигналів керування:
![]()
Будується принципова схема модуля керування МБК (рисунок В.2.).
Відповідність між входами керування мікросхем МБК і сигналами мікрооперацій наведено у таблиці В.2.
Таблиця В.2 - Відповідність між входами керування мікросхем МБК і сигналами мікрооперацій
Входи |
LA |
LB |
ЛИ1 |
LC |
Tn(J4) |
не EZ |
Сигнали мікрооперацій |
y1 |
y2 |
y3 |
y4 |
y6 |
y5 |
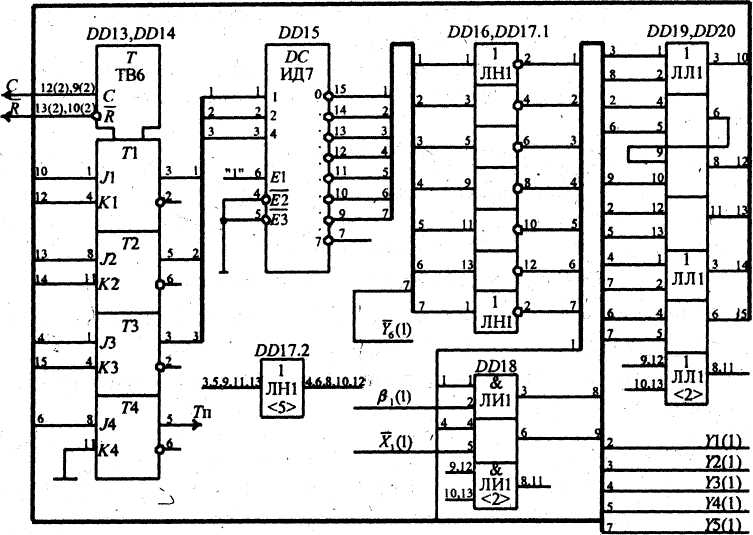
Рисунок В.2. Принципова схема МБК для операції додавання
Для побудови принципової схеми модуля МБК (рисунок В.2) використані наступні мікросхеми:
DD13, DD14 – дві мікросхеми типу ТВ6, кожна з яких містить по два JK-триггера (память автомата Мура);
DD15 — дешифратор типа ИД7. Використовується для виділення станів автомату;
DD16, DD17.1 — дві мікросхеми типу ЛН1, кожна з яких містить шість інверторів;
DD18 — мікросхема типу ЛИ1, кожна містить чотири конюнктора;
DD19, DD20 — дві мікросхеми типу ЛЛ1.
Перелік мікросхем, які використані для побудови АЛП, який реалізує операцію додавання, наведений в таблиці В.3.
Таблиця В.3
Позиції
|
Науменування именование микросхемы |
Кількість |
DDl,DD2 |
КР1533ИР35 |
2 |
DD3, DD4, DD19, DD20 |
КР1533ЛЛ1 |
4 |
DD5-DD8,DD18 |
КР1533ЛИ1 |
5 |
DD19 |
КР1533ЛП5 |
1 |
DD1O |
КР1533ИР22 |
1 |
DD1, DD12 |
КР1533ИМ6 |
2 |
DD13, DD14 |
KP1533TB6 |
2 |
DD15 |
КР1533ИД7 |
1 |
DD16, DD17 |
КР1533ЛН1 |
2 |
Проектування модуля блоку керування для мікропрограми віднімання
Проектування модуля блоку керування (МБК) на основі автомату Мілі з памятю на D-триггері виконується в наступній послідовності:
Розмічається закодований граф мікропрограми віднімання (рисунок В.3). Визначається максимальна кількість станів автомату Мілі, що дорівнює L = 5. Для реалізації такого числа станів необхідно використовувати n = ]log25[ = 3 триггера.
На основі розміченого графу мікропрограми будується граф автомату Мілі (рис. 1.10), який інтерпретує мікропрограму віднімання.
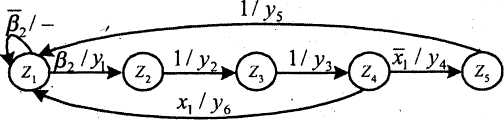
Рисуенок В.3. Граф автомата Мілі для мікропрограми віднімання
Стан автомату Мілі кодується значеннями виходів D-триггерів
![]()
На основі графа автомата Мілі записується його структурная таблиця переходів (табл. В.4).
Таблиця В.4 – Структурна таблиця переходів автомату Мілі
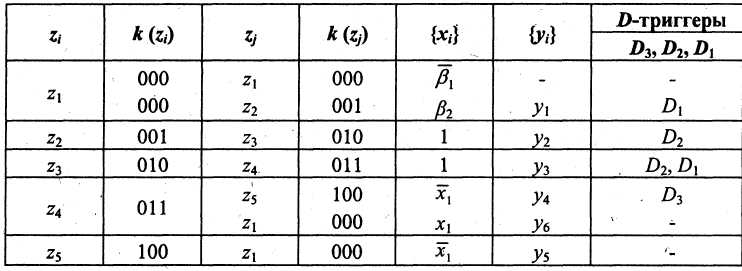
На основі даних табл. В.4 записуються системи логічних рівнянь для функцій збудження входів JK-триггерів і виходів:
Для функцій збудження входів:
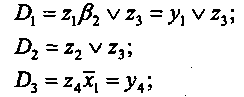
Для вихідних сигналів керування:
![]()
Будується принципова схема модуля керування МБК.
Відповідність між входами керування мікросхем МБК і сигналами мікрооперацій наведено у таблиці В.5.
Таблиця В.5 - Відповідність між входами керування мікросхем МБК і сигналами мікрооперацій
Входи |
LA |
LB |
ТЛИ |
LС |
не EZ |
ТП |
Сигнали мікрооперацій |
у1 |
у2 |
у3 |
у4 |
не у5 |
у6 |
СПИСОК ЛІТЕРАТУРИ
Савельєв А. Я. Прикладна теорія цифрових автоматів. Підручник для втузів./ А. Я. Савельєв – М.: Мир, 1989. – 85с.
Шило В. Л. Популярні цифрові мікросхеми./ В. Л. Шило – Вид-во «Питер», 1988. – 352 с.
Бондаренко М. Ф., Білоус Н. В. Комп’ютерна дискретна математика./ М. Ф. Бондаренко, Н. В. Білоус – Харків: Компанія СМІТ, 2004. – 480 с.
Зубчук В. И., Сигорский В. П., Шкуро А. Н. Справочник по цифровой схемотехнике./ В. И. Зубчук, В. П. Сигорский, А. Н. Шкуро – К.: Техника, 1990. – 448с.
Бойко В. І., Жуйко В. Я. та інші. Основи схемотехніки електронних схем/ В. І. Бойко, В. Я. Жуйко та інші. Підручник. – К.: Вища школа, 2004. – 526 с.
Бабич Н. П., Жуков И.А. Компьютерная схемотехника. Методы построения и проектирования: Учебное пособие./ Н. П. Бабич, И. А. Жуков – К.: МК–Пресс “, 2004. –576 с.