

13.1.2. Вращающийся трансформатор.
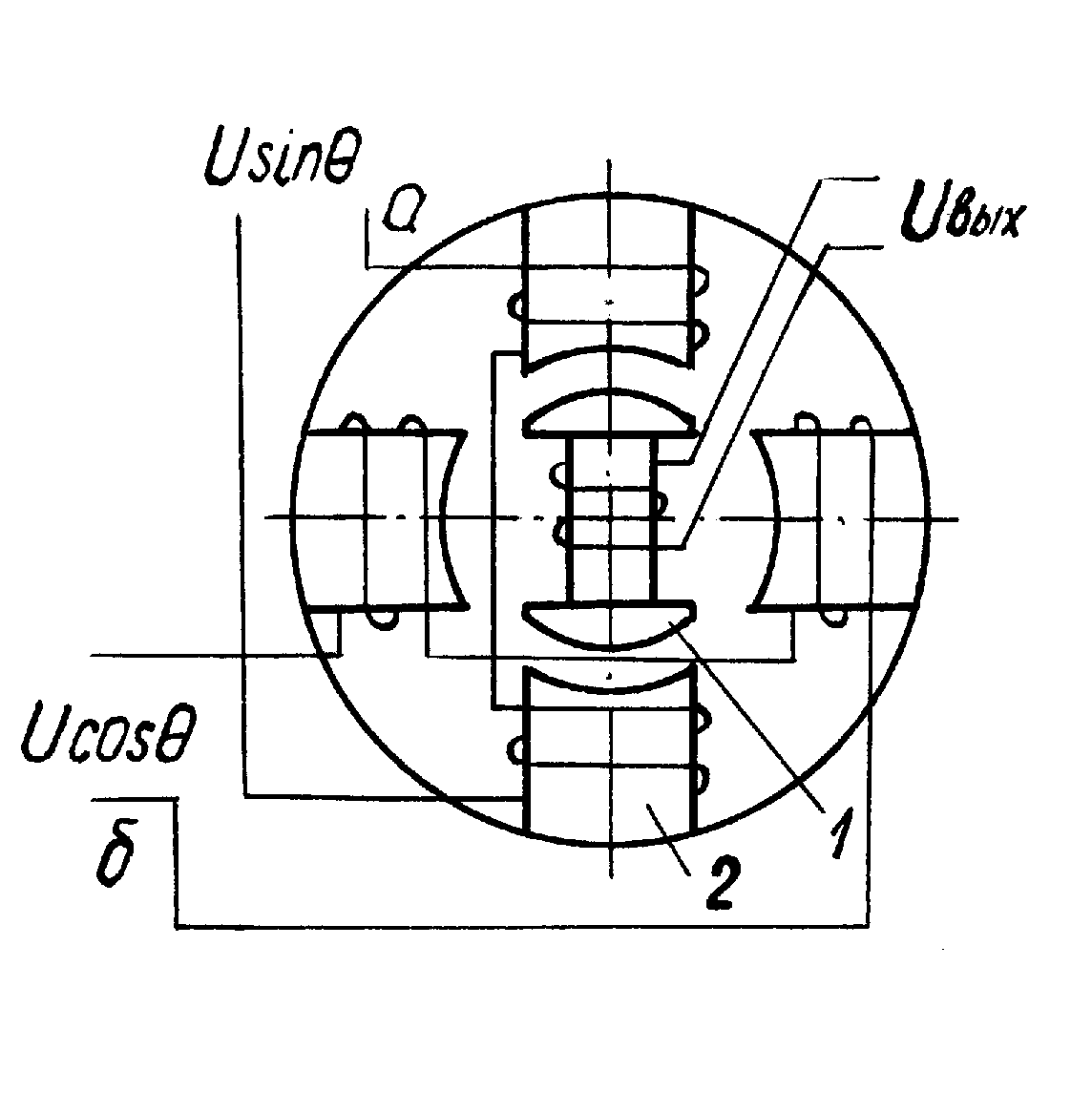
Широкое применение в станках с ЧПУ находят ДОС типа вращающегося трансформатора (ВТ) (рис.43). Они представляют собой маломощные двухфазные электрические машины переменного тока, у которых превращении ротора 1 взаимная индукция между обмотками статора 2 и ротора 1 изменяется сунусоидально с высокой точностью. На обмотку а статора подается напряжение U * sin, а на обмотку б - сдвинутое по фазе на 90 напряжение U * сos , где - угол смещения, отражающий заданную величину перемещения. С обмотки ротора 1 снимается напряжение Uвых. Число обмоток в ВТ может быть различным, однако чаще всего применяют ВТ с двумя взаимно- перпендикулярными обмотками на статоре и роторе. Такие синусно-конусные вращающиеся трансформаторы называют также резольверами. Помимо ВТ с одной парой полюсов применяют и многополюсные ВТ - редусины с числом пар полюсов от 15 до 180.
13.1.3. Фотоэлектрический датчик.
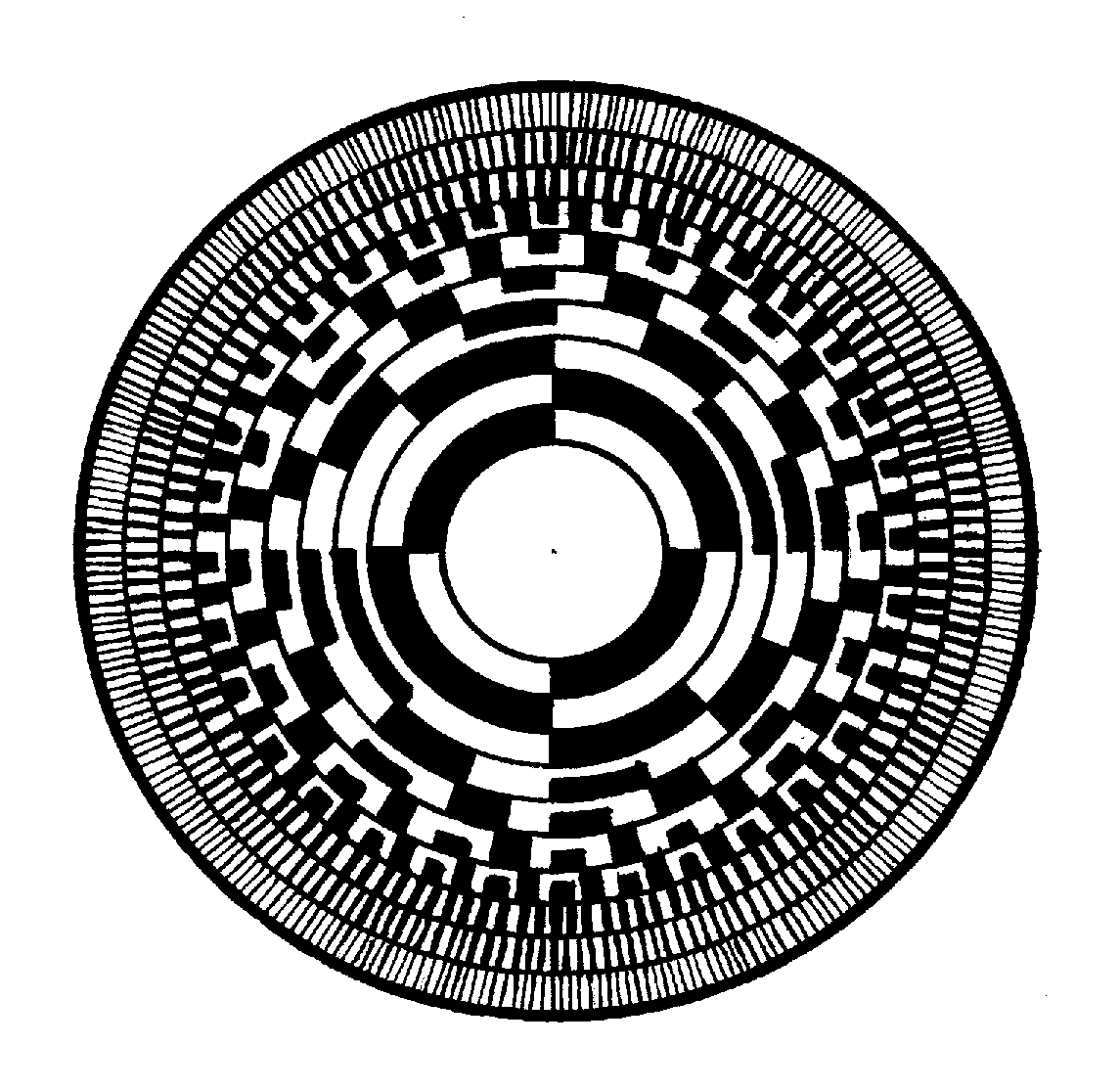
В позиционных системах ЧПУ применяются кодовые датчики обратной связи с измерением абсолютной величины перемещения рабочего органа. На рис.44 показан кодовый диск кругового фотоэлектрического датчика на десять двоичных разрядов. Каждое концентричное кольцо стеклянного диска состоит из затемненных и прозрачных участков, которые не пропускают свет на фотодиоды. Кольца соответствуют определенным разрядам: наружное кольцо - первому разряду, следующее кольцо - второму разряду и т.д. Кодовый диск устанавливают на станке так, чтобы его полный оборот соответствовал перемещению рабочего органа станка на максимальную величину. При этом каждому положению рабочего органа будет соответствовать единственная кодовая комбинация на диске, выдаваемая в систему управления фотодиодами.
|
|
|
Рис.43. Схема вращающегося трансформатора |
Рис. 44. Кодовый диск фотоэлектрического датчика обратной связи |
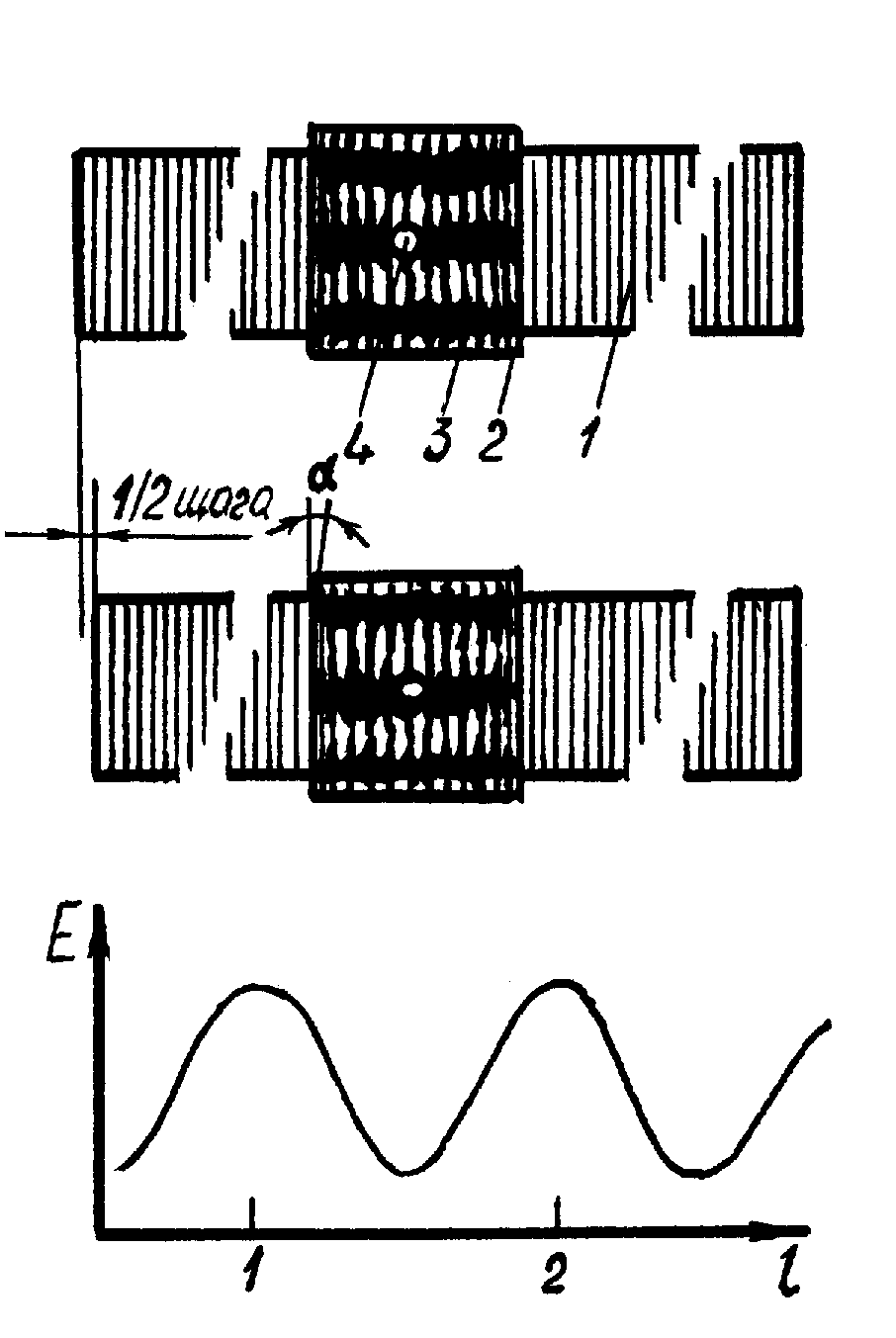
Рис.45. Импульсный линейный ДОС Фирмы Ferrani (Англия) |
13.1.4 Датчик фирмы « Ferranti»
На рис.45 показана схема импульсного линейного датчика фирмы «Ferrfnti» (Англия) с неподвижной дифракционной решеткой 1, относительно которой перемещается подвижная вспомогательная шкала 2. Она повернута относительно основной решетки на угол , поэтому при ее перемещении на величину L образуются перемещаемые в вертикальном направлении муаровые полосы 3 , которые периодически перекрывают пучок света 4 , пропускаемый через решетки на два фотоэлемента. Освещенность Е фотоэлементов будет изменяться по синусоидальному закону (рис.45). При перемещении вспомогательной шкалы 2 на один шаг штрихов с фотоэлементов поступает один импульс.
13.2 Передаточные механизмы привода подачи.
Они могут состоять из зубчатой передачи (или редуктора) и передачи винт-гайка, которая преобразует вращательное движение электродвигателя в поступательное перемещение рабочего органа станка. К этим механизмам предъявляют требования высокой точности, обусловленной отсутствием зазоров, высокой жесткостью и малыми потерями на трение.
Применение в приводах подач высоко моментных низкооборотных быстродействующих электродвигателей постоянного тока, устанавливаемых непосредственно на ходовом винте позволяет значительно упростить и сократить длину кинематической цепи привода подачи, увеличить ее крутильную жесткость и уменьшить число зазоров, влияющих на точность передачи движения.