

12.1.1. Тиристорные преобразователи.
Тиристор является полупроводниковым прибором, который состоит из четырех различных по легированию слоев кремния с выводами анода, катода и управляющего электрода. Тиристор:
- является управляемым выпрямителем тока, пропускающим ток только в одном направлении;
- открывается, когда анод становится положительнее катода и протекает ток зажигания;
- открывается в случае приложения к нему напряжения включения;
- при уменьшении тока тиристора до нуля в результате понижения напряжения или изменения знака напряжения тиристор закрывается;
- тиристор может запираться в обоих направлениях.
Тиристор - элемент силовой электроники. Управляющие тиристорные блоки - это электронные схемы с одним или несколькими тиристорами, которые для пропускания тока в одном направлении. Тиристорные, или, как их часто называют, вентильные, преобразователи могут быть одно-, двух-, трех- и шестиимпульсными.
На рис.35 изображены схемы одно- и трехимпульсных тиристорных преобразователей и диаграммы изменений напряжений во времени. Питание преобразователя осуществляется через фазы А и В. Разность во времени Тц прохождения очередного импульса через нулевое значение напряжения составляет для одно-, двух-, трех- и шестиимпульсных преобразователей соответственно 20, 10, 6,6 и 3,3 мкс.
При использовании одно- и двухимпульсных тиристорных преобразователей из-за большой пульсации тока, которая определяется питающим напряжением, происходит сильный нагрев двигателя. Эти преобразователи можно применить для станков с высокими требованиями к точности и небольшими крутящими моментами.
Одноимпульсный тиристорный преобразователь (рис.37) состоит их одного тиристора Т1 для пропуска тока в прямом направлении и тиристора Т2 для реверсирования тока и направления вращения управляемого двигателя. Т1 и Т2 включаются навстречу друг другу. Слева на рис.37 изображена схема непосредственного присоединения тиристорного блока к сети переменного тока. Тиристоры поджигаются импульсами тока в соответствующие моменты от специальной схемы управления в том случае, если напряжение на аноде больше, чем на катоде.
Электродвижущую силу двигателя, пропорциональную выводному напряжению тиристорного блока, нагляднее всего сравнить с зарядом конденсатора в случае, если якорная цепь двигателя не имеет заметной индуктивности.
На рис.37 справа изображена эквивалентная схема с конденсатором С и подключаемым нагрузочным сопротивление Rн. При нагружении двигателя сопротивления Rн должно регулироваться таким образом, чтобы в цепи протекал постоянный ток, пропорциональный нагрузочному моменту двигателя. При нагружении двигателя напряжении конденсатора С должно меняться. В дальнейшем будем рассматривать заряд конденсатора с отключенным нагрузочным сопротивлением.
Нижний график показывает изменение напряжения сети, выходного тиристорного блока, а также поджигающие импульсы и импульсы тока Jа проходящего через двигатель. Анод тиристора Т1 соединен с фазой В, а катод через сопротивление и конденсатор подключен к фазе А. Тиристор Т1 можно зажечь только тогда, когда А станет положительнее В. Момент зажигания для тиристора Т1 определяется углом , а для тиристора Т2 углом . Угол отсчитывается от ближнего нуля синусоидом напряжения сети в направлении положительных значений выходных напряжений. При подаче на тиристор Т1 поджигающего импульса тиристор зажжется и конденсатор будет заряжаться положительными зарядами, если мгновенное напряжение на аноде А положительнее, чем на катоде. Это может произойти, когда мгновенное напряжение сети выше напряжения Uc конденсатора.
В течении двух первых периодов разность между напряжением сети и Uc в момент прохождения тока зажигания велика, велик и емкостный ток при резком возрастании напряжения конденсатора Uc. При уменьшении разности напряжения убывает емкостный ток и уменьшается возрастание напряжение конденсатора.
Чтобы разрядить конденсатор, необходимо зажечь тиристор Т2 в момент времени, соответствующий углу , который отсчитывается от точки прохождения сетевого напряжения через нуль в направлении отрицательных значений выходного напряжения тиристора.
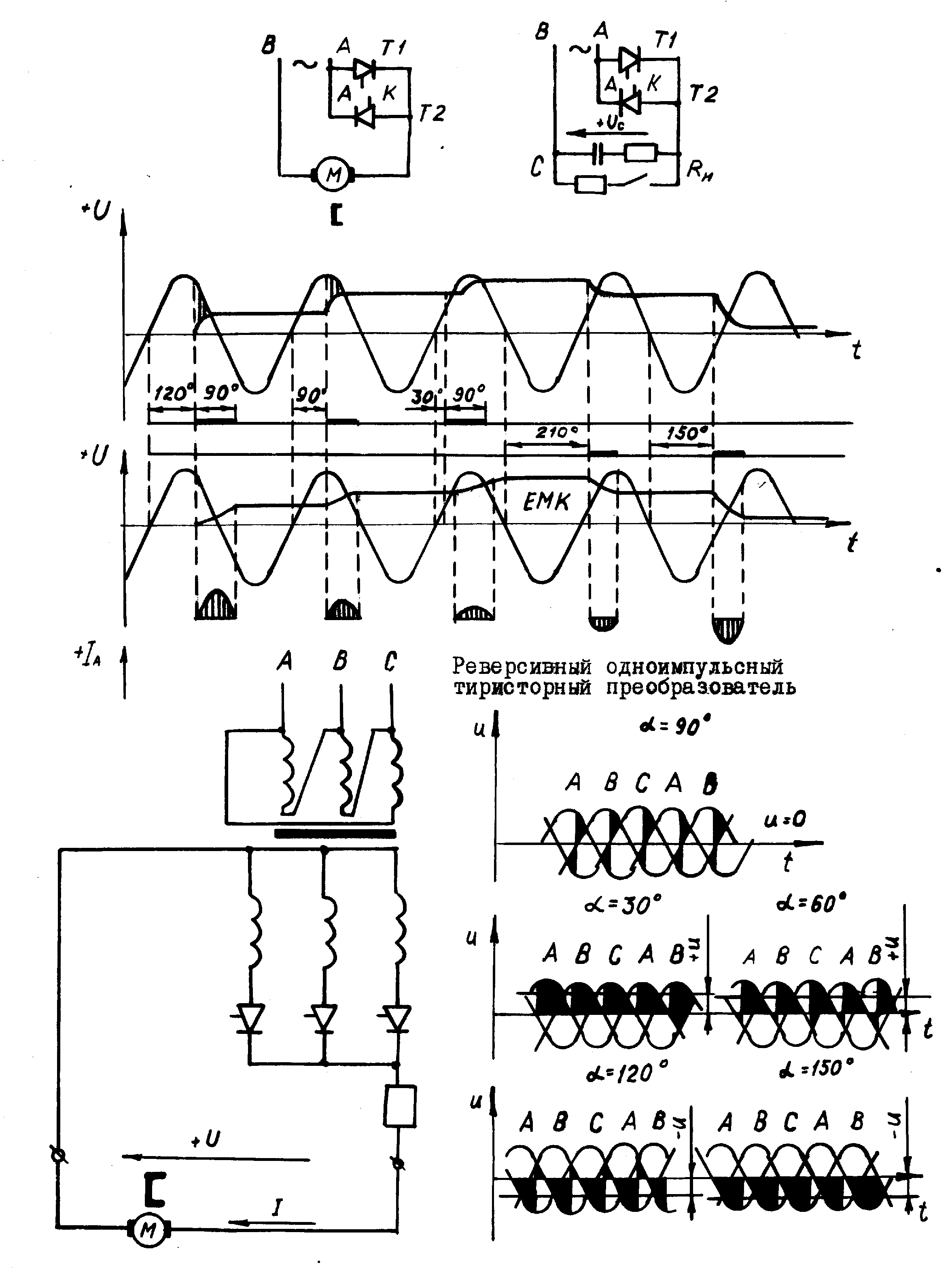
Рис.37 (вверху). Реверсивный одноимпульсный тиристорный преобразователь
Рис.38 (внизу). Схема и диаграмма напряжений трехимпульсного нереверсивного
тиристорного преобразователя
Угол зажигания тиристора Т2 смещен на 1800 относительно угла зажигания тиристора Т1. Анод тиристора Т2 через резистор соединен с конденсатором, а катод подключен к сети, поэтому напряжение конденсатора Uc должно быть положительнее мгновенного значения напряжения сети. Пока Uc положительно, конденсатор разряжается через тиристор Т1, и энергия отдается обратно в сеть. Такой режим возврата энергии в сеть через тиристор называется инверторным. Дальнейшая зарядка конденсатора возможна отрицательными зарядами при зажигании тиристора Т2. В этом случае углы зажигания должны быть меньше 1800. Разрядка отрицательно заряженного конденсатора будет происходить только через тиристор Т1.
Вследствие индуктивности якорной цепи двигателя и накопления энергии в катушке индуктивности ток якоря в течение короткого времени продолжает течь даже тогда, когда мгновенное напряжение сети становится меньше ЭДС двигателя. Вращательный момент, ускоряющий двигатель, пропорционален току якоря, так что возрастают частота вращения двигателя и, следовательно его ЭДС. Так же обстоит дело при торможении и реверсировании двигателя с помощью тиристора Т2.
При использовании одноимпульсного тиристорного преобразователя ток всегда прерывист. Эта прерывистость может устраняться дополнительными индуктивностями.
Для пуска преобразователя зажигание теоретически должно начинаться при угле = 0. Практически чаще всего ограничиваются углом зажигания = 15. При торможении от максимальной частоты вращения угол зажигания должен быть меньше 270. Для обеспечения плавного торможения с учетом потерь в кинематической цепи торможение можно начинать при = 240. Таким образом диапазон зажигания для одноимпульсной схемы 15 240.
На рис.38 показаны схема и диаграмма напряжения трехимпульсного нереверсивного тиристорного преобразователя выполненного по схеме звезды. Преобразователь питается сетевым напряжением через трансформатор. Аноды соединены в одну точку, способную нести полную нагрузку.
При постоянном зажигании тиристоров на выходе преобразователя получаем напряжение Uвых с характерной для него пульсацией. При подаче поджигающего импульса первый тиристор пропускает ток до тех пор, пока мгновенное значение напряжения фазы В станет больше напряжения в фазе А. Затем зажигается тиристор в фазе С. При увеличении угла зажигания > 30 возникают провалы напряжения. Выходное напряжение Uвых определяется интегрированием напряжения во времени, т.е. площадью под кривой U = f(t). При угле зажигания = 90 площади по обе стороны оси абсцисс равны и Uвых = 0. При угле зажигания = 120 преобладает отрицательное напряжение, при этом двигатель будет тормозиться, а тиристорный преобразователь будет работать в инверторном режиме, возвращая энергию в сеть. Таким образом при < 900 преобразователь работает в выпрямительном режиме, при > 900 - в инверторном.