

В. Кпд двигателя.
= f ( P2 ) при U=const
Коэффициент полезного действия двигателя постоянного тока определяется по формуле
![]()
При изменении режима работы двигателя меняется подводимая мощность P1 и мощность потерь энергии p поэтому меняется и КПД.
При теоретическом холостом ходе, когда Р2=0, = 0. При увеличении нагрузки КПД сначала быстро увеличивается до максимального значения, а затем начинает уменьшаться.
Коэффициент полезного действия двигателя достигает максимального значения max при такой нагрузке, когда постоянные потери равны переменным потерям.
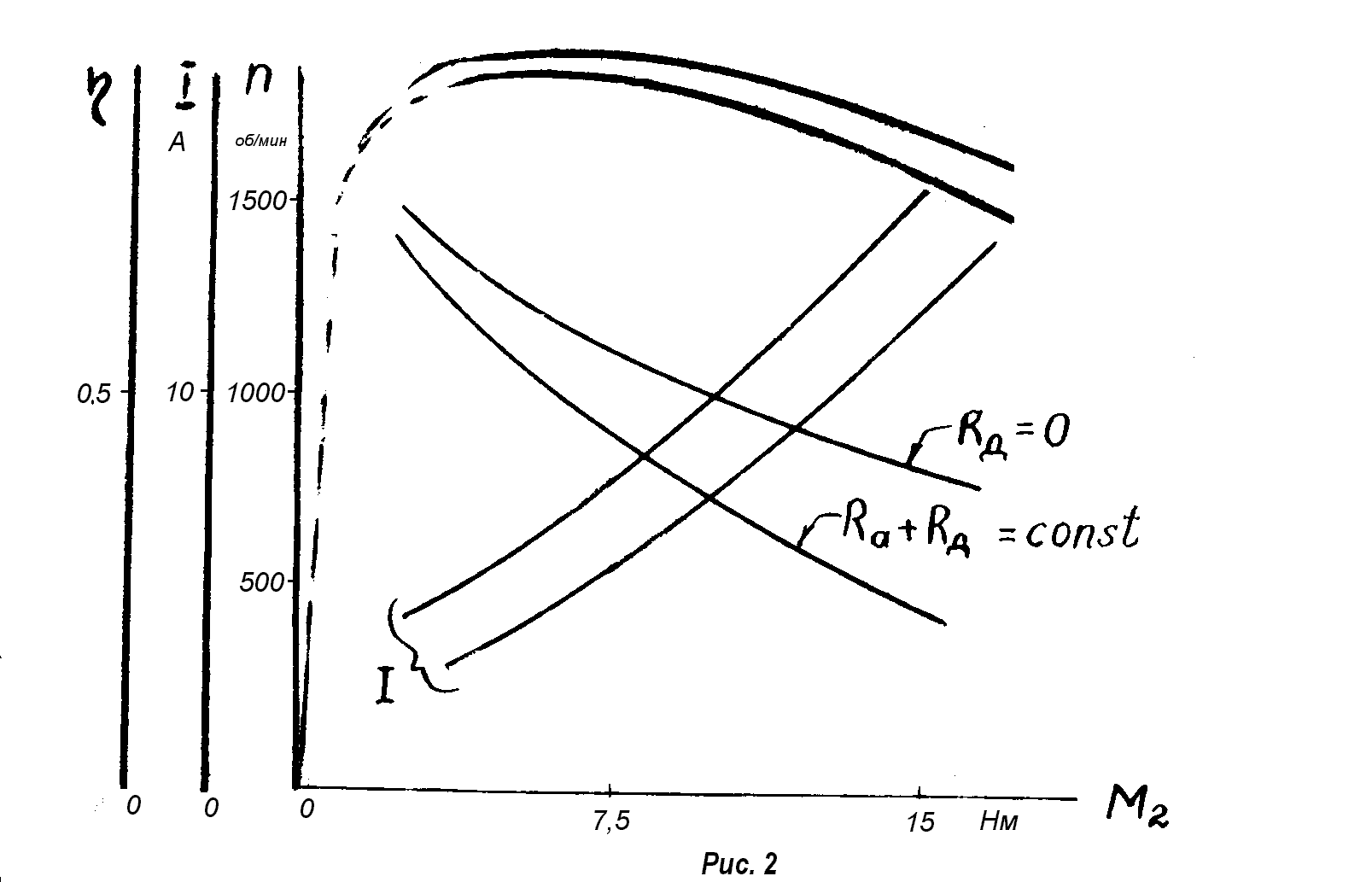
Механические характеристики двигателя представляют зависимости:
n =f ( M2 ) при U=const и (Ra + Rд ) = const
На рис. 2 изображены механические, токовые и характеристики КПД двигателя последовательного возбуждения, снятые при отсутствии(естественная характеристика) и наличии добавочного сопротивления Rд (искусственная характеристика).
Угол наклона механической характеристики зависит от величины добавочного сопротивления Rд, включенного в цепь якоря. При одном и том же моменте на валу двигателя, чем больше будет добавочное сопротивление, тем меньше будет напряжение на зажимах якоря, тем меньше будет частота вращения двигателя.
Регулировочные характеристики двигателя представляют зависимости:
а) n = f(U) при М2 = const;
б) n = f(Iв ) при U = const и М2 = const.
Первая характеристика дает возможность судить о том, как будет изменяться частота вращения двигателя при изменении напряжения на зажимах якоря и постоянной величине полезного момента на валу двигателя.
Вторая характеристика показывает, как изменится частота вращения двигателя при изменении тока возбуждения или изменения магнитного потока двигателя (1) .
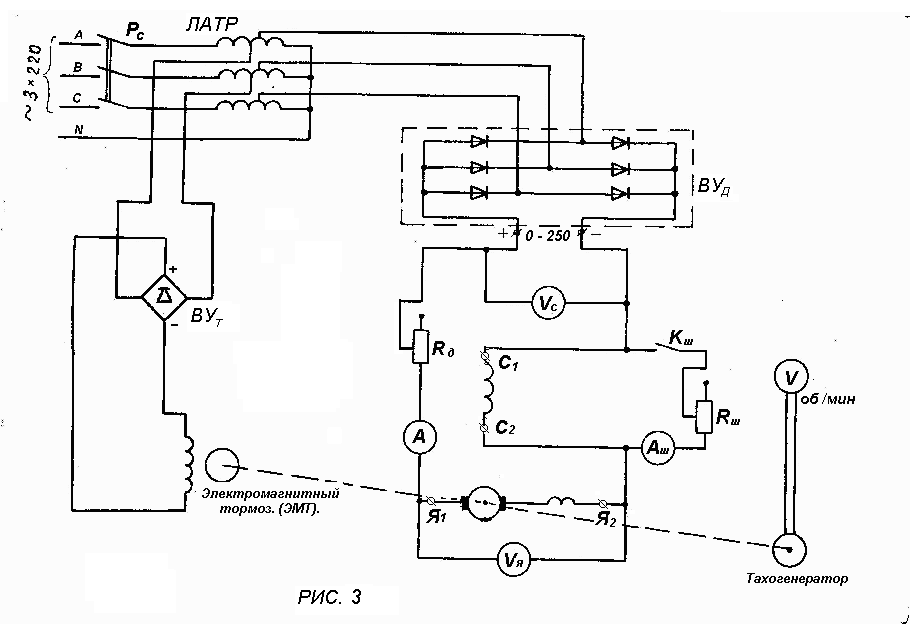
Описание схемы. На рис.3 показана схема, собранная на испытательном стенде. При включении выключателя Рс напряжение попадает на автотрансформатор ЛАТР, который является регулируемым источником питания стенда.
Регулятор “ МАШИНА” изменяет напряжение в пределах 0 250 на входе схемы стенда. А регулятор “ ТОРМОЗ ” изменяет напряжение на зажимах катушек тормозного устройства стенда. Он не должен находиться в нулевом положении, т.к. при пуске надо иметь какое-то значение момента, чтобы двигатель не пошёл в разнос ( ток при пуске должен быть в пределах 9 11 А). Исходя из конструкции стенда, пуск осуществляется способом изменения напряжения на зажимах двигателя от нуля до номинального.
Переменный ток выпрямляется с помощью диодных выпрямителей: ВУд и ВУт.
3. Содержание работы
1. При исследовании двигателя снять и построить:
1) рабочие характеристики:
I, n, M2, = f(P2 ) при U=const
2) механические, токовые и КПД характеристики:
а) естественные:
n, I, = f(M2 ) при U=const и Rд =0;
б) искусственные:
n, I, = f(M2 ) при U=const и (Ra + Rд) =const.
3) регулировочные характеристики:
а) п = f(U ) при М2 =const ;
б) п = f(Iв ) при U =const и М2 =const .
4. Порядок выполнения работы
1. Ознакомиться с конструкцией электродвигателя и электромагнитного тормоза или нагрузочного устройства, записать данные заводского щитка, число главных и добавочных полюсов, способ охлаждения.
2. Разобраться со схемой (рис. 3), определив назначение приборов и аппаратов.
3. Осуществить пуск двигателя. Перед пуском двигателя убедиться, что регулятор «МАШИНА» находится в нулевом положении и введён регулятор электромагнитного тормоза (устройство для измерения вращающего момента).
4. Снять и построить рабочие характеристики двигателя:
I, n, M2, = f(P2 ) при U=const
Для этого необходимо пустить двигатель в ход, нагрузить его до I = 1.2 Iн и, постепенно разгружая, записать показания приборов в табл. 1, сняв 5 6 замеров. Частота вращения двигателя при наименьшей нагрузке не должна превышать 1,5 пн .
Расчет мощности Р1 , Р2 и момента М2 выполнять по следующим формулам:
а) мощность, потребляемая двигателем Р1 = U I ;
б) полезная мощность на валу двигателя
P2 = M2
, где
![]() р/с, М2 – Нм ;
р/с, М2 – Нм ;
в) КПД = Р2 / Р1 .
Таблица 1
Измерено |
Вычислено |
|||||
U |
I |
M2 |
n |
P1 |
P2 |
|
B |
A |
Нм |
об/мин |
Вт |
Вт |
-- |
5. Механические, токовые и характеристики КПД двигателя:
а) естественные: n, I, = f(M2 ) при U=const и Rд =0; строятся по данным табл.1.
б) искусственные: n, I, = f(M2 ) при U=const и (Ra + Rд) =const – снимаются при введении в цепь якоря двигателя добавочного сопротивления по заданию преподавателя. Первую запись также сделать при наибольшем моменте на валу, затем уменьшить его до значения , при котором частота вращения двигателя будет не более n = 1,5 nн. Показания записать в табл.2 такой же формы, что и табл.1.
6. Снять и построить регулировочные характеристики двигателя:
а) п = f(U ) при М2 =const .
Пустить двигатель в ход и установить момент, равный (0,4—-0,5) Мн. Установить при помощи ручки регулятора напряжения «МАШИНА» напряжение на двигателе UС = 0.5 UН . Далее увеличивая напряжение на зажимах двигателя до UН, поддерживая М2 =const, снять 56 замеров. Частота вращения двигателя не должна превышать 1,5 nн . Показания приборов при всех опытах записать в табл.3.
Таблица 3
N п.п. |
U |
I |
n |
M2 |
В |
А |
об/мин |
Нм |
|
1, |
|
|
|
|
б) п = f(Iв ) при U =const и М2 =const .
Для регулирования частоты вращения двигателя способом ослабления магнитного поля машины необходимо пустить двигатель в ход, установить тормозной момент по электромагнитному тормозу, равный (0,7—0,8) МН, и поддерживать его на протяжении опыта постоянным. Включить рубильник Кш , шунтирующий обмотку возбуждения, плавно увеличивать ток шунта от Iш = 0 до Iш = 0,25 IН. Частота вращения двигателя при наибольшем ослаблении магнитного поля не должна превышать 1,5nн.
Записать в табл.4 показания приборов при 4—5 замерах.
Ток возбуждения определяется по формуле: Iв = I – Iш .
Таблица 4
N п.п. |
U |
I |
Iш |
М2 |
n |
Iв |
В |
А |
А |
Нм |
об/мин |
А |
|
1 |
|
|
|
|
|
|