

7. Построение систем аэп с заданным статизмом.
Для построения системы с заданным статизмом ёмкость в обратной связи регулятора скорости необходимо зашунтировать сопротивлением Rш (рисунок 7).
Рисунок 7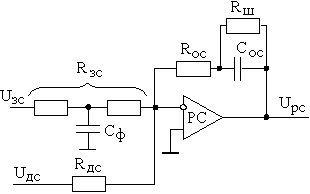
![]()
![]()
![]()
![]()
![]()
1) Rш=0, ![]()
2) Rш→0, ![]()
8. Статическая точность двухконтурных систем аэп с прп с обратной связью по эдс двигателя.
В соответствии с рисунком 8.1, в состав контура ЭДС входят регулятор ЭДС, ЗКТ, датчик ЭДС, интегрирующее звено.
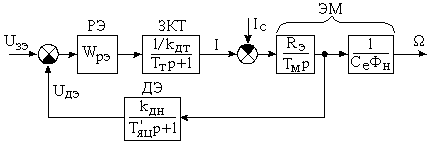
Рисунок 8.1.
где Тэ = Тт + Тяц – малая постоянная времени контура ЭДС.
МО:
 ;
;
![]() .
.
С П-регулятором замкнутый контур ЭДС является по заданию астатическим первого порядка, а по возмущению статическим.
 .
.
Наличие фильтра в канале датчика ЭДС приводит к повышенному перерегулированию ЭДС двигателя. Настройка контура на МО была проведена по отношению к сигналу датчика ЭДС. Для приведения перерегулирования к норме на входе контура необходимо поставить фильтр с той же постоянной времени, что и у датчика ЭДС.
Тогда передаточная функция замкнутого контура эдс будет иметь вид
 .
.
 ;
;
УР:
![]() .
.
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Жесткость скоростных характеристик при больших Тяц может быть хуже, чем в разомкнутой системе. Поэтому при подключении датчика напряжения подбирают такие точки съема сигнала, чтобы Тяц была минимальной.
9. С какой целью включают фильтры на входе дн и входе рэ в аэп с обратной связью по эдс?
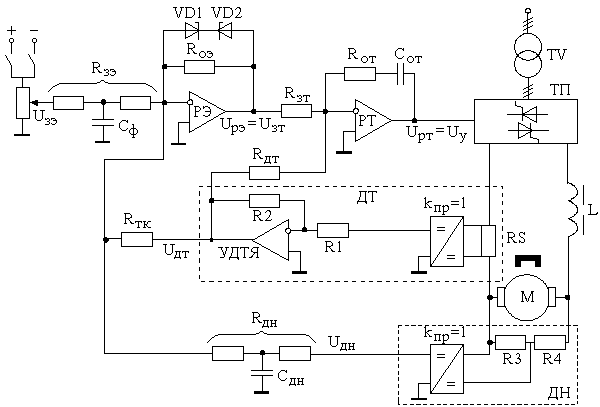
Рисунок 9.1
Фильтр на выходе
ДН ставят для компенсации падения
напряжения в якорной цепи, равного
![]() .
.
Наличие фильтра в канале датчика ЭДС приводит к повышенному перерегулированию ЭДС двигателя. Для приведения перерегулирования к норме на входе контура РЭ необходимо поставить фильтр с той же постоянной времени, что и у ДН.
10. Что дает применение задатчика интенсивности (зи) на входе системы регулирования, в чем это проявляется?
Без задатчика интенсивности динамический ток двигателя, определяющий темп изменения скорости зависит от величины статической нагрузки и режима работы привода (пуск, торможение).
Пуск: Iдин = Imах – Iс
![]()
Торможение: Iдин = – (Imax + Ic)
![]()
Для ограничения темпа изменения скорости, что требуется для ряда механизмов, на входе контура скорости (см. рисунок 5.37) устанавливается задатчик интенсивности (ЗИ), который определяет и задает величину динамического тока, поэтому его называют задатчиком динамического тока.
Задатчик интенсивности устанавливает величину динамического тока, поэтому полный ток двигателя определяется величиной нагрузки и режимом работы привода.
Iдин = (0,50,7)Iн;
Пуск: I = Iдин
+ Ic
![]() ;
;
Ток двигателя при всех возможных нагрузках не выходит на уровень максимального.
Если темп ЗИ большой (Iдин>Iн), то при номинальной нагрузке привода этот темп отрабатываться не будет. РС выйдет на ограничение, задавая максимальный ток.
Торможение: I =
Iдин
+ Iс
![]()
На этапе торможения со статической нагрузкой на валу ток двигателя может не изменить своего знака и остаться того же направления.
Ic>Iдин.
Ток остается в двигательном режиме, тем самым удерживая излишне большой темп торможения, вызванный излишком нагрузки на валу.