

6. Статическая точность двухконтурных систем аэп с прп (с п и пи – регуляторами скорости). Структурная схема контура скорости представлена на рисунке 6.1.
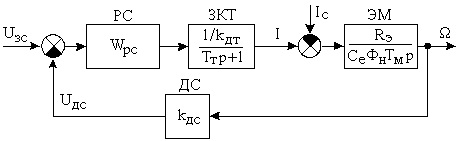
Рисунок 6.1.
Объект регулирования содержит апериодическое звено с малой постоянной времени и интегрирующее звено.
Возможны два варианта оптимизации:
- на МО (контур скорости однократноинтегрирующий);
- на СО (контур скорости двухкратноинтегрирующий).
Кратность интегрирования определяется количеством интегральных звеньев во внешнем контуре.
-Однократноинтегрирующая система аэп ( п-регулятор):
Iс = 0.
![]() ;
;
![]() .
.
С этим П-регулятором система астатична по заданию и статична по возмущению. В целом система статическая.

где Тс = 2Тт – эквивалентная постоянная времени оптимизированного на МО контура скорости.
![]() .
.
УР:
![]() .
.
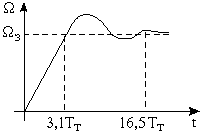
График переходного процесса контура скорости представлен на рисунке 6.2.
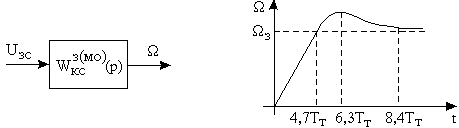
Рисунок 6.2.
Такой характер переходного процесса будет в том случае, если все звенья системы являются линейными (не выходят на ограничение регулятора скорости). С данным регулятором контур скорости является астатическим первого порядка по заданию.
При подаче линейного сигнала задания появляется ошибка по скорости, т.е. система является статической по заданию. Порядок астатизма равен номеру производной во входном сигнале, при котором контур становится статическим, т.е. появляется ошибка по скорости.
Передаточная функция контура скорости по возмущению

![]() ;
;
УР:
![]() .
.
По возмущению контур скорости является статическим. Величина ошибки пропорциональна Iс.
![]()
-Двукратноинтегрирующая система АЭП (ПИ –регулятор)
СО:
![]() ;
;
![]() .
.
Получили ПИ-регулятор, у которого kрс(со) = kрс(мо); Тиз = 4Тт.
![]() .
.
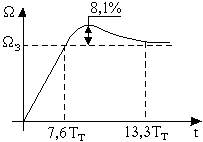
График переходного процесса контура скорости представлен на рисунке 6.3а. Такой переходный процесс будет только пока все звенья контура линейные (пока регулятор скорости не вышел на ограничение) и это возможно при подаче лишь малых сигналов задания.
Такой переходный процесс в системах ЭП нежелателен, поэтому для уменьшения перерегулирования на входе включают фильтр.
![]() ,
,
где Тс(со) = 4Тт – эквивалентная постоянная времени оптимизированного на СО контура скорости.
Тс(мо) = 2Тт;
Тс(со) = 4Тт.
Контур скорости, оптимизированный на СО с фильтром на входе имеет быстродействие вдвое меньшее, чем контур, оптимизированный на МО.
Данный контур скорости является по заданию астатическим второго порядка (только при наличии 2-й производной во входном сигнале появляется ошибка). Астатизм достигнут за счет уменьшения быстродействия.
При нелинейно изменяющемся входном сигнале задания на скорость на выходе регулятора будет сигнал, полученный в результате интегрирования и запоминания интегральной части регулятора. При появлении скоростной ошибки сигнал на выходе регулятора скорости будет изменяться, что будет приводить к изменению сигнала задания на ток и соответственно тока, что свидетельствует о переходных процессах в приводе. Скоростная ошибка в этой системе по заданию возможна только в начале и в конце отработки линейно изменяющегося сигнала задания.
Передаточная функция контура скорости по возмущению


![]() ;
;
УР:
![]() .
.