

Экзаменационные вопросы суэо (II часть)
1. Способы ограничения тока в переходных режимах.
Для ограничения тока в системах ЭП используют следующие способы:
построение контура регулирования тока и ограничение задания на его входе (рис.1а). применяется в многоконтурных система ЭП с подчиненным регулированием параметров (ПРП), предполагает наличие датчика и регулятора тока.
задерганная обратная связь по току (токовая отсечка), которая включатся при достижении током некоторой уставки и препятствует его дальнейшему увеличению (рис 1б). В данном случае не требуется специального регулятора тока, сигнал датчика тока через пороговый элемент подается непосредственно на вход регулятора скорости. Этот способ не эффективен в ЭП с малой электромагнитной постоянной времени и при работе в режиме прерывистого тока, так как в этом случае не исключает начальный бросок тока в переходных режимах.
ограничение выходного напряжения ТП в функции ЭДС двигателя (упреждающее токоограничение, рис 1в). Суть способа: ток якорной цепи определяется разностью ЭДС преобразователя и двигателя:
 .
Для ограничения тока Еd
должна отличаться от Ед на величину не
более чем ±RяцIя_доп.
Величина Ed
определяется напряжением управления
ТП (Uу=Uрс),
которая должна быть ограниченна в
функции Ед, либо в функции сигнала
тахогенератора:
.
Для ограничения тока Еd
должна отличаться от Ед на величину не
более чем ±RяцIя_доп.
Величина Ed
определяется напряжением управления
ТП (Uу=Uрс),
которая должна быть ограниченна в
функции Ед, либо в функции сигнала
тахогенератора:
 .
Предполагая линейной зависимость
Ed=kТПUРС,
получим
.
Предполагая линейной зависимость
Ed=kТПUРС,
получим
 .
Схемная реализация устройства ограничения
включается параллельно цепи обратной
связи, либо параллельно выходной цепи
регулятора скорости.
.
Схемная реализация устройства ограничения
включается параллельно цепи обратной
связи, либо параллельно выходной цепи
регулятора скорости.

Рисунок 1
2. Настройка контура регулирования на модульный оптимум (лачх, пп, тд, область применения).
Цель оптимизации: найти такой регулятор, при котором регулируемая величина будет отрабатывать задающее воздействие как можно быстрее, точнее и без возникновения колебаний.

Идеальный режим оптимизации:
![]() ,
,
![]() ,
,
![]() ,
, ![]()
Реальная оптимизация:
![]() ,
,
![]()
![]() ,
,
![]()
![]() ,
,
Реально в процессе оптимизации инерционности объектов компенсируют насколько это возможно и необходимо. Для помехоустойчивости контуров регулирования в контуре оставляют нескомпенсированную постоянную Тμ=(0,003-0,01) с.
В замкнутых системах АЭП чаще всего встречаются передаточные функции двух видов:
 ,
,  ;
;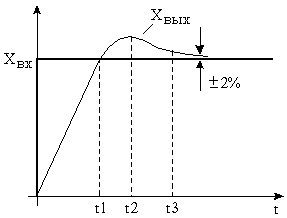
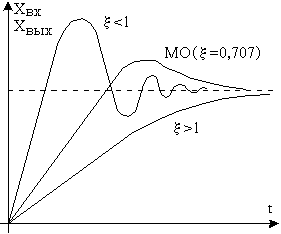
Рисунок 2.1
 ,
,
,
,
 .
.
![]() ,
тогда: 1) 2а0а2=а12
,
тогда: 1) 2а0а2=а12
2) 2а0а2=а12, 2а1а3=а22
Настройка на МО является компромиссной. Быстродействие контура можно увеличить, но вместе с тем растет перерегулирование, аналогично перерегулирование можно уменьшить, но уменьшится и быстродействие (см. рисунок 2.1), то есть любая настройка это компромисс между техническими возможностями и экономической целесообразностью.
Настройка на модульный оптимум легко технически реализуема и применяется там, где необходимы средние показатели по быстродействию и перерегулированию.
ЛАЧХ разомкнутого контура оптимизированного на МО представлена на рисунке 2.2.
Рисунок 2.2
ЛАЧХ разомкнутого
контура с
![]()