

12.Составление симплекс таблиц. Критерий оптимальности
Симплекс –метод основан на переходе от одного опорного плана к другому, при котором значение целевой функции возрастает при условии, что задача имеет оптимальный план и каждый опорный план является невырожденным.
Этот переход возможен, если известен какой-либо опорный план.
В этом случае каноническая задача линейного программирования должна содержать единичную подматрицу порядка m
Тогда очевиден первоначальный опорный план( неотрицательное базисное решение системы ограничений КЗЛП).
План, при котором целевая функция ЗЛП принимает свое максимальное
(минимальное ) значение , называется оптимальным
Этот план определяется системой единичных векторов , которые образуют базис m-векторного пространства.
Проверка на оптимальность опорного плана происходит с помощью критерия оптимальности.
Критерий оптимальности (критерий оптимизации) — характерный показатель решения задачи, по значению которого оценивается оптимальность найденного решения, то есть максимальное удовлетворение поставленным требованиям. В одной задаче может быть установлено несколько критериев оптимальности.
Признак оптимальности опорного плана
Полученный опорный план снова проверяется на оптимальность и т.д. Процесс заканчивается за конечное число шагов, причем на последнем шаге либо выявляется неразрешимость задачи (конечного оптимума нет), либо получаются оптимальный опорный план и соответствующее ему оптимальное значение целевой функции.
Признак оптимальности заключается в следующих двух теоремах.
Теорема 1. Если для некоторого вектора, не входящего в базис, выполняется условие:
![]() ,
где
,
где  ,
, ![]()
то можно получить новый опорный план, для которого значение целевой функции будет больше исходного; при этом могут быть два случая:
если все координаты вектора, подлежащего вводу в базис, неположительны, то задача линейного программирования не имеет решения; если имеется хотя бы одна положительная координата у вектора, подлежащего вводу в базис, то можно получить новый опорный план.
Теорема 2. Если для всех
векторов выполняется условие ![]() ,
то полученный план является оптимальным.
,
то полученный план является оптимальным.
На основании признака
оптимальности в базис вводится вектор ![]() ,
давший минимальную отрицательную
величину симплекс-разности:
,
давший минимальную отрицательную
величину симплекс-разности: ![]() .
.
Чтобы выполнялось условие
неотрицательности значений опорного
плана, выводится из базиса вектор ![]() г,
который дает минимальное положительное
отношение:
г,
который дает минимальное положительное
отношение:
 ;
; ![]() , .
, .
![]()
14. Транспортная задача. Постановка задачи
Постановка задачи:
Однородный груз сосредоточен у m поставщиков в объемах а1, а2, …, аm.
Данный груз необходимо доставить n потребителям в объемах, b1, b2, … , bn.
Известен Сij (i= 1, 2, … , m; j=1, 2 ,…, n) – стоимости перевозки единицы груза от каждого i-го поставщика каждому j-му потребителю.
Требуется составить такой план перевозок, при котором запасы всех поставщиков вывозятся полностью, запросы всех потребителей удовлетворяются полностью и суммарные затраты на перевозку всех грузов минимальны. Исходные данные транспортной задачи записываются в таблице вида:
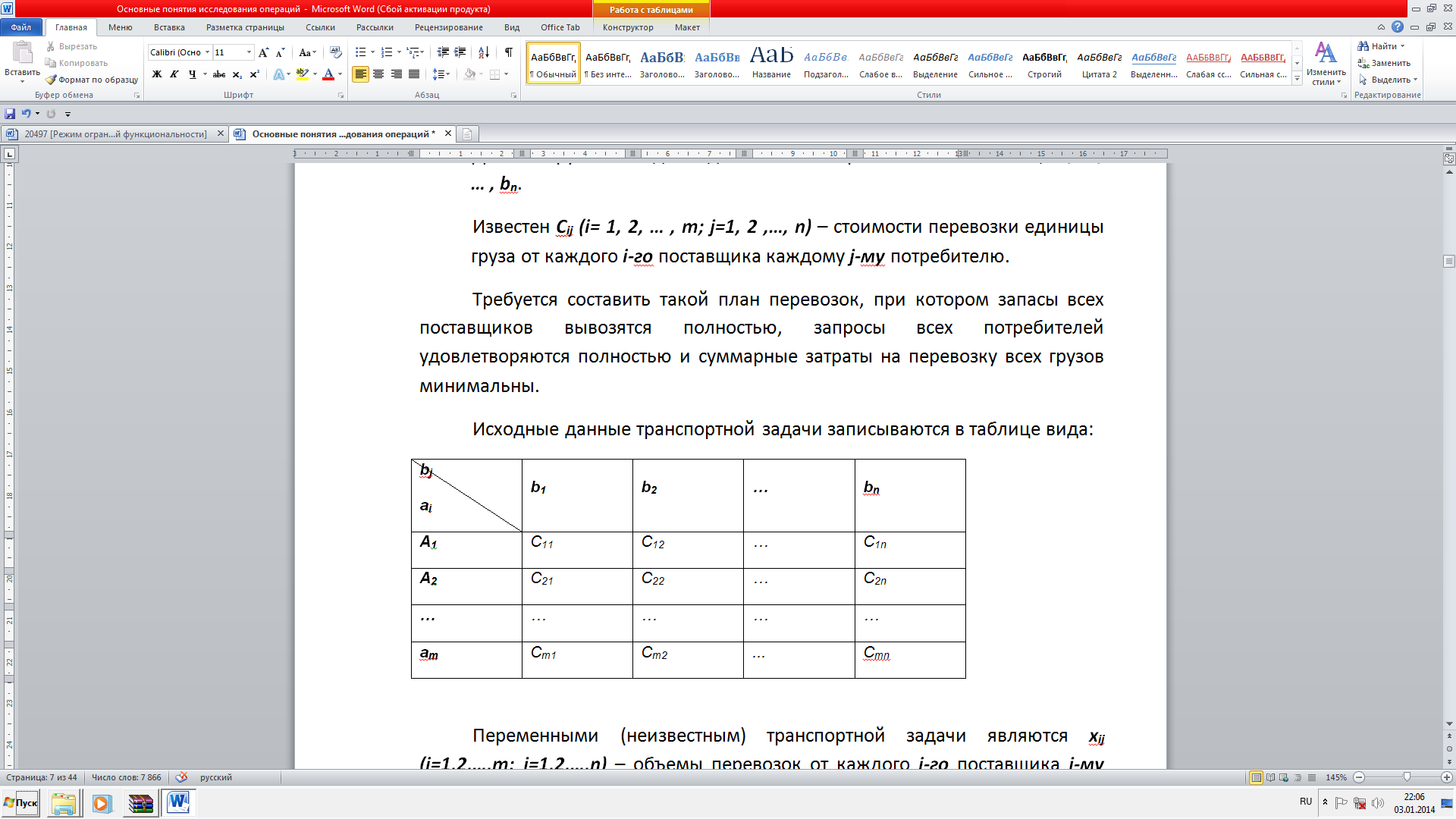
Переменными (неизвестным) транспортной задачи являются xij (i=1,2,…,m; j=1,2,…,n) – объемы перевозок от каждого i-го поставщика j-му потребителю. Эти переменные могут быть записаны в виде матрицы перевозок.
