

2.8. Режим динамического торможения
Режим динамического торможения с независимым возбуждением осуществляется следующим образом: якорь работающего двигателя отключается от сети и замыкается на сопротивление. Обмотка возбуждения остается включенной в сеть (рис.2.10). Якорь машины постоянного тока вращается за счет сил инерции или активного момента рабочей машины.
Так как двигатель отключен от сети, уравнения электромеханической и механической характеристик имеют вид:
![]()
 .
(2.17)
.
(2.17)
Анализируя полученные уравнения, можно отметить:
- характеристики проходят через начало координат (рис.2.11);
- характеристики находятся в четвертом или втором квадранте;
- наклон механических характеристик, как и в двигательном режиме, определяется величиной Rдоб и потока Ф.
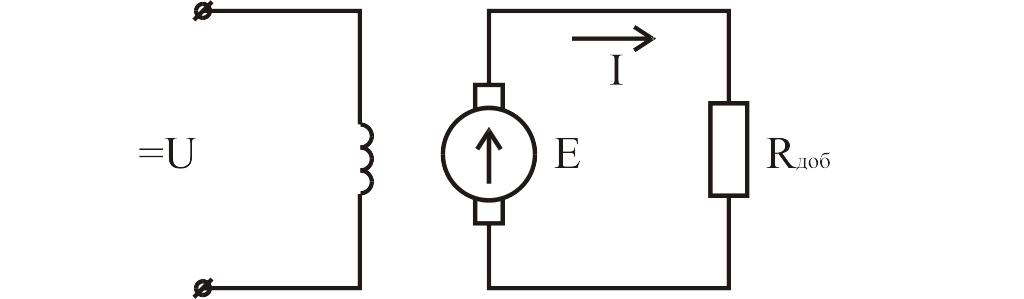
Рис. 2.10.Схема включения ДПТ в режиме динамического торможения с независимым возбуждением
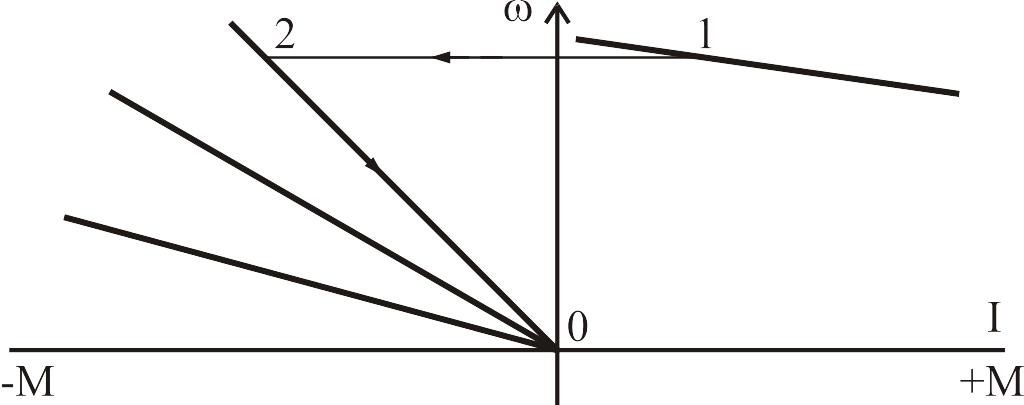
Рис.2.11. Механическая характеристика ДПТ
Особенности режима динамического торможения
при остановленном двигателе динамический момент равен нулю;
в области малых скоростей значение тормозного момента мало.
Умножим левую и правую части уравнения электромеханической характеристики (2.17) на ток:
![]() ;
;
![]() .
.
Таким образом, вся подведенная к валу от рабочей машины механическая мощность преобразуется в электрическую и идет в якорную цепь двигателя постоянного тока, где выделяется в виде теплоты.
2. 9. Режим противовключения
Режим противовключения возникает в машине постоянного тока в следующих случаях:
1. Если со стороны рабочей машины к валу двигателя прикладывается встречный активный момент и двигатель останавливается, а затем начинает вращаться в обратную сторону (против включения).
Рассмотрим рис. 2.12, на котором Мс - активный момент, создаваемый грузом, поднимаемым лебедкой крана. Допустим, что подъем идет со скоростью 1. Если в какой-то момент времени в цепь якоря ввести добавочное сопротивление Rдоб, то двигатель перейдет на искусственную механическую характеристику. Момент двигателя уменьшится до М2. Так как М2 Мс, то скорость подъема будет уменьшаться. По мере снижения скорости двигателя его момент увеличится. Но при = 0 (в верхней точке подъема) момент двигателя меньше активного момента Мс, поэтому якорь начинает вращаться в обратную сторону (против включения), а груз - опускаться. В точке 4 моменты уравновешиваются, Мдв = Мс, и спуск продолжается уже с постоянной скоростью 4. В точке 4 двигатель работает в тормозном режиме - режиме противовключения.
2. Режим противовключения возникает в работающем двигателе при реверсе - смене направления вращения. В момент переключения напряжения на якоре значение и направление вращения не изменяются, т.е. 1 = 3 за счет сил инерции (рис.2.13). Под действием сменившего свой знак напряжения на якоре изменяется направление тока и момента двигателя (положительный М1 меняется на отрицательный М3). От точки 3 до точки 4 машина работает в режиме противовключения.
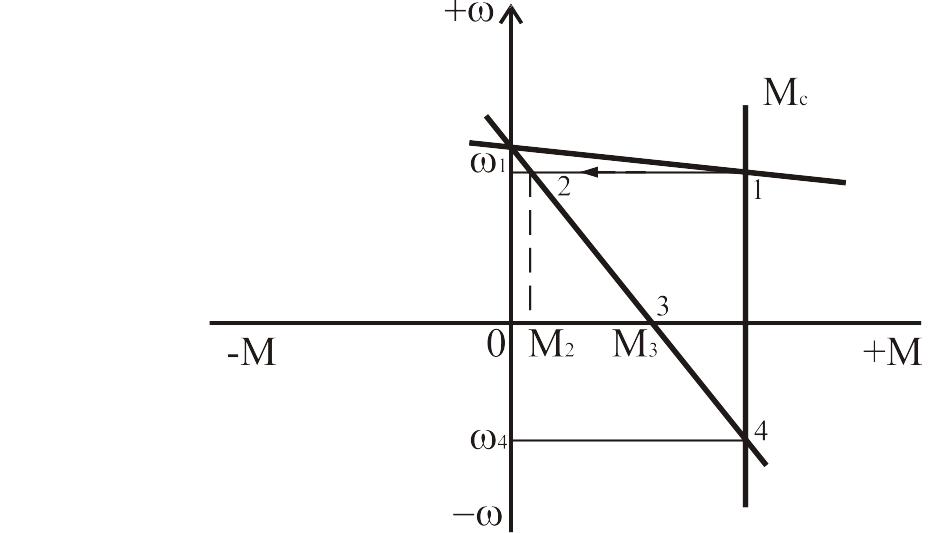
Рис.2.12. Механические характеристики ДПТ в режиме
Противовключения
Выражения механической и электромеханической характеристик имеют вид
![]() ;
(2.18)
;
(2.18)
![]() (2.19)
(2.19)
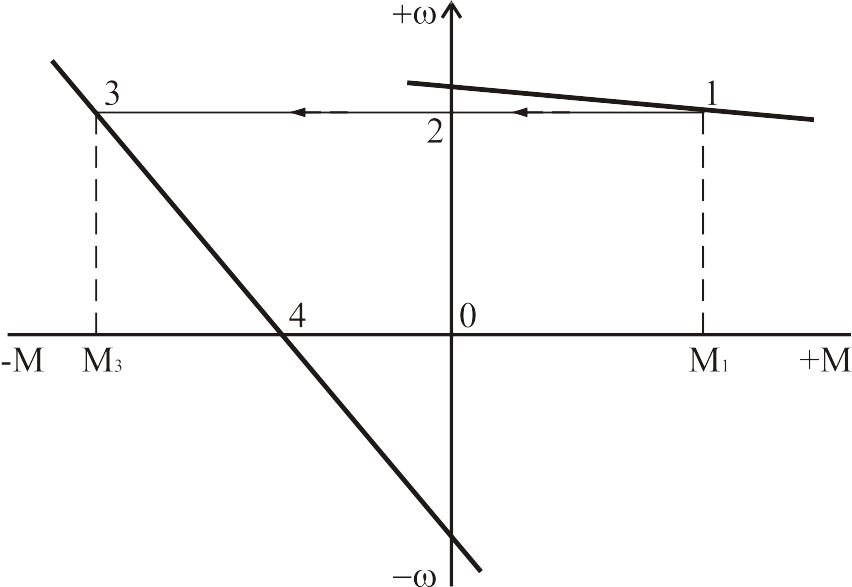
Рис.2.13. Механические характеристики ДПТ независимого
возбуждения в режиме противовключения при реверсе
Особенности режима противовключения
1) напряжение сети и ЭДС двигателя действуют согласно (суммируются), что приводит к росту тока якорной цепи. Для ограничения этого тока необходимо включить добавочное сопротивление или снизить напряжение источника питания;
2) механическая мощность с вала и из сети поглощается в якорной цепи. Значения этих мощностей можно определить, если умножить левую и правую части уравнения (2.19) в режиме противовключения на I сФ:
![]() .
.