

4.Функционально-структурная схема элемента. Динамические характеристики элемента.
При наличии нескольких входов для координаты x элемент выполняют сначала функцию суммирования, а затем функцию преобразования результирующего сигнала.
Выходная координата формируется физически некоторой внутренней координатой v (ню). Тогда с помощью этой координаты элемент можно разделить функционально на два блока Б1 и Б2 (рис. 1.5).
Функциональная схема элементов разъясняет процессы, протекающие в их отдельных частях.
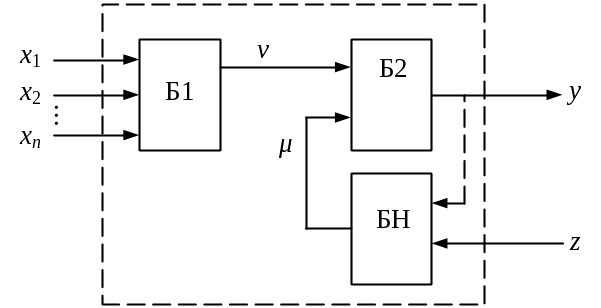
Рис. 1.5. Блочная структура модели элемента
Входной блок Б1 производит суммирование управляющих сигналов и их преобразование в координату v, являющуюся выходной величиной для Б1.
Выходной блок преобразует величину для v в выходную координату y.
Влияние возмущения по нагрузке учитывается как дополнительный сигнал μ (мю) на входе Б2. Для обеспечения равнозначности входных сигналов блока Б2 возмущение по нагрузке подается в общем случае в виде нелинейной функции μ(z,y), которая формируется в блоке нагрузке БН. В соответствии с полученным представлением запишем характеристики управления для входного блока Б1
v = φ1(x), (1.3)
для выходного блока Б2
y = φ2(v + μ), (1.4)
для элемента в целом
y = φ2(φ1(x) + μ(z,y)) = φ(x,z), (1.5)
Рассмотрим характерные для элементов случаи. Входной сигнал возмущающего воздействия μ (мю) является функцией только нагрузки z, т.е. μ = μ(z). Тогда при линейном блоке Б1 φ2(х)=k1∙x характеристики управления элемента определяются выражением
y = φ2(k1∙x+ μ(z)) = φ2(k1∙(x+ μ(z)/k1)). (1.6)
Из (1.6), следует, что при x = const характеристики уравнения конгруэнтны в направлении оси x (рис. 1.6, а). При линейном блоке Б2
y = φ2(v + μ) = k2(φ1(x) + μ(z)) (1.7)
4.
при z = const характеристики управления конгруэнтны направлении оси y (рис. 1.5, б).
Если дополнительно будет также линейным блок нагрузки БН, т.е. когда μ(z) = –kнz, то внешние характеристики элемента будут линейны.
y = k2∙ φ1(x) –k2kнz = y0(x) –k2kнz. (1.8)
Согласно терминологии ТАУ коэффициенты пропорциональности для линейных характеристик управления называются передаточными коэффициентами соответственно для блока Б1 k1 для Б2 k2 и для всего элемента k = k1∙k2.

Рис.1.6. Характеристики управления при линейных блоках входном (а), выходном (б) и внешние характеристики при линейном блоке нагрузки элемента (в)
Представленная блочная модель элемента с двухкаскадным преобразованием входного управляющего сигнала является достаточно общей. В ней отражается и нелинейность преобразования, и учет влияния нагрузки.
Входной и выходной блоки реального элемента могут характеризоваться не только нелинейностью, но и инерционностью. В элементах инерционность обусловлена электромагнитными цепями, и конденсаторными фильтрами во входных и выходных цепях. При наличии инерционности характеристики (1.1), (1.2), (1.3) – (1.5) становятся статическими, т.е. справедливыми только в установившихся режимах. Для линейных цепей проще учитывать инерционность. Потому в дальнейшем блок Б1 и Б2, если необходимо учитывать их инерционность, будем рассматривать в линейном приближении, когда его нелинейная характеристика аппроксимируется отрезками прямой. Такой линеаризованный блок математически рассматривается апериодическое звено.
блок Б1
(Т1p + 1)v = k1x, (1.9)
блок Б2
(T2p + 1)y = k2(v+μ), (1.10)
где Т1, Т2 постоянные времени входного и выходного блоков, с электрической схемы замещения элементов.