

Преобразователи датчиков
Преобразователями датчиков называют устройства, обеспечивающие преобразование сигнала от чувствительного элемента датчика в пропорциональное величине сигнала напряжение (ЭДС) переменного тока или унифицированный токовый (пневматический) сигнал (для датчиков ГСП). Сигналом от чувствительного элемента может служить линейное перемещение плунжера (в дифференциально-трансформаторных преобразователях) или угол поворота рамки (в ферродинамических преобразователях). В преобразователях датчиков ГСП чаще всего используется метод силовой компенсации.
Дифференциально-трансформаторный преобразователь. Такой преобразователь состоит из дифференциального трансформатора (катушки), плунжера, одной первичной и двух вторичных обмоток. Если плунжер расположен симметрично относительно вторичных обмоток, то наводимые в них ЭДС равны, но противоположны по знаку. В этом случае выходной сигнал преобразователя равен нулю. При перемещении плунжера вверх или вниз от среднего положения соответственно изменяется величина и знак выходного сигнала.
Отечественной промышленностью выпускается несколько типов дифференциально-трансформаторных преобразователей (ПЭС, ДПЭС-Т, ЭПВИ-14 и др.).
Для получения унифицированного сигнала эти преобразователи подключают к специальным вторичным (нормирующим) преобразователям типа НП-П1М или НП-ПЛ1.
Ферродинамический преобразователь (рис. 1). В состав преобразователя входят магнитопровод, включающий ярмо 1, плунжер 5 и сердечник 3 с агатовыми подпятниками, в которых поворачивается на стальных кернах подвижная рамка 4. На магнитопроводе расположена катушка 2 с обмотками возбуждения (в некоторых типах преобразователей наряду с обмоткой возбуждения имеется одна или две обмотки смещения). Обмотка возбуждения подключается к источнику переменного тока частотой 50 Гц и напряжением 12 или 60 В.
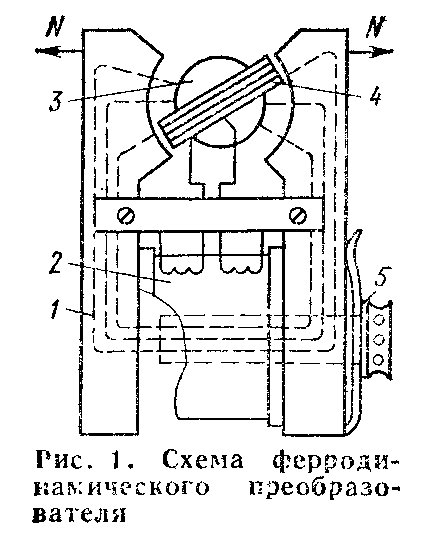
Переменный ток обмотки возбуждения создает магнитный поток, индуктирующий в подвижной рамке ЭДС величиной 1 — 0—1 В (ЭДС зависит от угла поворота рамки относительно оси N—N). При наличии обмотки смещения в ней индуктируется ЭДС величиной 1 В.
Промышленностью выпускается несколько модификаций ферродинамических преобразователей типа ПФ с напряжением выходного сигнала 1—0—1 В, а также от 0 до 2 В (при одной обмотке смещения) или от 1 до 3 В (при двух обмотках смещения). Для преобразования выходного сигнала ферродинамнческих преобразователей в унифицированный сигнал постоянного тока или напряжения используют дополнительные преобразователи типа ПФТ (0—5 и 0—1 мА) или ПФН (0—3 и 0—10 В).
Преобразователи датчиков ГСП. Эти преобразователи могут быть электросиловыми (рис. 2) и пневмосиловыми. Функционально они аналогичны.
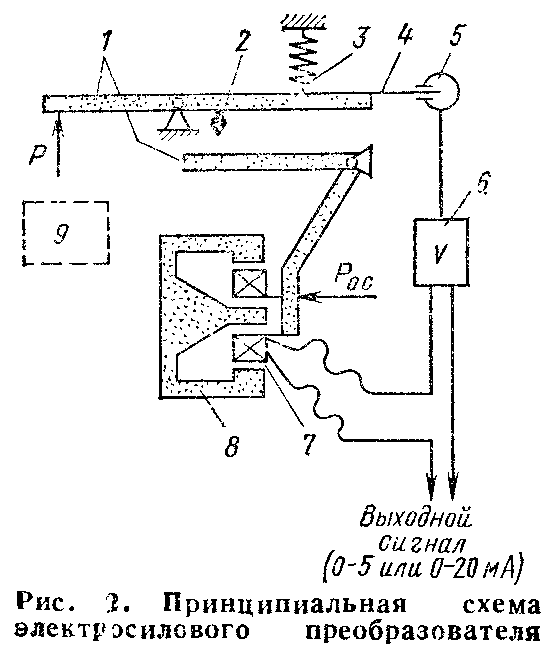
Чувствительный элемент датчика 9 механически воздействуя на рычажную систему 1 с усилием Р, пропорциональным измеряемому параметру, перемещает управляющий флажок 4 дифференциально-трансформаторного индикатора рассогласования 5. В последнем это перемещение преобразуется в электрический сигнал переменного тока, поступающий на вход электронного усилителя 6. Выходной сигнал электронного усилителя поступает в линию дистанционной передачи к измерительному прибору и одновременно на обмотку 7 магнитоэлектрического устройства 8. В последнем создастся усилие обратной связи Р0, с, которое уравновешивает входное усилие Р.
Настройка преобразователя осуществляется перемещением корректора 2, изменяющим передаточное отношение рычажной системы. Установка начального значения выходного сигнала осуществляется с помощью пружины 3. Преобразователи с элек- тросиловой компенсацией работают в комплекте с полупроводниковыми электронными усилителями типа УП-20 (выходной сигнал 0—20 мА) и УП-20-5 (выходной сигнал 0—5 мА).