

1.Основные линии и плоскости наблюдателя. Основные направления в море и их соотношения (ик, ип, ку). Системы счета направлений в море (круговая, полукруговая, четвертная, румбовая).
Основные линии и плоскости наблюдателя.
В оображаемая
прямая PN
PS,
вокруг которой происходит суточное
вращение земли называется земной
осью. Эта
ось совпадает с малой осью земного
эллипсоида. Точки PN
и PS
пересечения земной оси с поверхностью
Земли называются полюсами.
Полюс PN
со стороны которого вращение Земли
наблюдается против движения часовой
стрелки называется северным, противоположный
полюс PS
– южным.
оображаемая
прямая PN
PS,
вокруг которой происходит суточное
вращение земли называется земной
осью. Эта
ось совпадает с малой осью земного
эллипсоида. Точки PN
и PS
пересечения земной оси с поверхностью
Земли называются полюсами.
Полюс PN
со стороны которого вращение Земли
наблюдается против движения часовой
стрелки называется северным, противоположный
полюс PS
– южным.
На поверхности Земли в точке М находится наблюдатель. Его глаз находится в точке А.
Линия zMn проведённая через место наблюдателя и центр земного шара, называется отвесной линией. Все плоскости, проведённые через эту линию,называются вертикальными, перпендикулярные ей - горизонтальными. Горизонтальная плоскость НН, проходящая через глаз наблюдателя, называется плоскостью истинного горизонта наблюдателя.
Вертикальная плоскость VV', проходящая через место наблюдателя М и земную ось, называется плоскостью истинного меридиана. В месте пересечения этой плоскости с поверхностью Земли образуется большой круг PN E PS Q называемый истинным меридианом наблюдателя. т.е. истинный меридиан наблюдателя - географический меридиан, проходящий через место наблюдателя.
Географический меридиан - линия пересечения земной поверхности условной плоскостью, проходящей через северный и южный географические полюсы.
Прямая, полученная от пересечения плоскости истинного горизонта с плоскостью истинного меридиана, называется линией истинного меридиана, или линией N-S. Этой линией определяются направления на северную и южную точки горизонта.
Вертикальная плоскость FF', перпендикулярная плоскости истинного меридиана, называется плоскостью первого вертикала. В пересечении с плоскостью истинного горизонта она образует линию Е-W, перпендикулярную линии N-S и определяющую направления на восточную и западную точки горизонта.
Системы счета направлений в море.
Направления N,E,S,W называют главными направлениями или румбами в плоскости истинного горизонта, которыми сама плоскость истинного горизонта делится на четыре равные четверти NE,SE,SW,NW
Любое направление (румб) на поверхности земли измеряют углом. В плоскости истинного горизонта, для этой цели используют четыре системы измерения горизонта.
Круговая система. Весь горизонт делят на 360° в счет направлений ведут от 0 до 360° по часовой стрелке от N-й части истинного меридиана наблюдателя.
Полукруговая система. Счет направлений ведут как от N-й так и от S-й частей истинного меридиана наблюдателя в сторону E или W от 0 до 180°. Для направления полукругового счета кроме величины угла обязательно указывают от какой части истинного горизонта и в какую сторону отсчитано данное направление пример N98°E, S139°W, S12°W, N54°E.
Четвертная система. Каждую четверть горизонта делят на 90° счет направлений ведут как от N-й так и от S-й частей истинного меридиана наблюдателя в сторону E или W от0 до 90°. Направление показывают наименованием четверти и соотв. углом пример NE84°, SE32°, SW53°, NW71°.
Румбовая система. Это устаревшая система, но ее употребляют для указания направления ветра, волнения, течения. Горизонт делят на 32 части=11.25°. (МТ-75 табл 41)
Основные направления в море и их соотношения (ИК,ИП,КУ).
К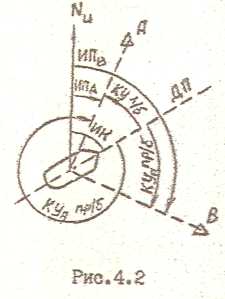 основным направлениям, принятым в
судовождении, относятся: курс, пеленг,
курсовой угол.
основным направлениям, принятым в
судовождении, относятся: курс, пеленг,
курсовой угол.
Истинный курс судна (ИК) – угол в плоскости истинного горизонта между Nu и носовой частью продольной оси судна по часовой стрелке от 0 до 360°.
Истинный пеленг (ИП) - угол в плоскости истинного горизонта между Nu и направлением из точки наблюдения на объект, измеряемый по часовой стрелке от 0 до 360.
Направление отличающиеся на 180° от ИП – это обратный ИП (ОИП).
Курсовой угол (КУ) – угол в горизонтальной плоскости между носовой частью продольной оси судна и направлением из точки наблютеля на объект.
Курсовой угол измеряется в полукруговом счете от 0 до 180° правого и левого бортов. Курсовому углу правого борта (пр./б) присваивается знак "плюс", курсовому углу левого борта (л/б) знак "минус".
При радиопеленговании курсовые углы; измеряются в круговой счёте от 0° ло 360°. ИП, КУ, связаны между собой зависимостями ИП = ИК + КУ; ИК = ИП - КУ; КУ = ИП - ИК.
формулы алгебраические, поэтому при расчётах следует учитывать знак курсового угла. Если в результате расчёта ИП или ИК получатся со знаком "минус", то берется их дополнение до 360° со знаком "плюс".
КУ 90° любого борта –траверз.
Направление,перпендикулярное диаметральной плоскости судна (линии курса), называется траверзным направлением.