

5. Автоматизація процесу прибирання посліду
Вибір того чи іншого способу прибирання посліду в пташниках залежить в основному від технології утримання, виду і віку птиці. Засоби механізації прибирання посліду можна класифікувати за мобільністю - на стаціонарні та пересувні. До стаціонарних належать механізми, які входять до комплектів технологічного обладнання пташників і змонтовані як усередині, так і за їхніми межами. Вони призначені для прибирання посліду з місць утримання птиці і транспортування його до пересувних транспортних засобів або безпосередньо до місця утилізації. До пересувних належать бульдозери, тракторні причепи та спеціальні автомобілі.
Якщо птиця утримується в багатоярусних кліткових батареях, то послід прибирають з кожного ярусу канатно-скребковими установками і ними ж скидають на горизонтальні конвеєри.
Головними робочими органами канатно-скребкових установок є скребки, що закладаються по одному або по кілька на один ярус у міжярусний простір. Скребки з'єднуються тросом у вигляді замкненого контуру і приводяться в рух від електропривода.
Можливе прибирання посліду по ярусам кліткових батарей за допомогою стрічкових транспортерів, які розміщують між ярусами кліток. Для видалення посліду зі стрічки в кінці кліток встановлюють нерухомі скребки.
При утриманні птахів на підлозі використовують канатно-скребкові конвеєри, що встановлюють в спеціальні послідні канали, які розміщені під настилом.
Для транспортування посліду за межі приміщень застосовують похилі конвеєри, скребкові гноєнавантажувачі та інші пристрої.
Канатно-скребкові установки призначені для видалення посліду з каналів, розміщених вздовж пташника, при підлоговому утриманні птиці, а також при утриманні в одноярусних та каскадних кліткових батареях.
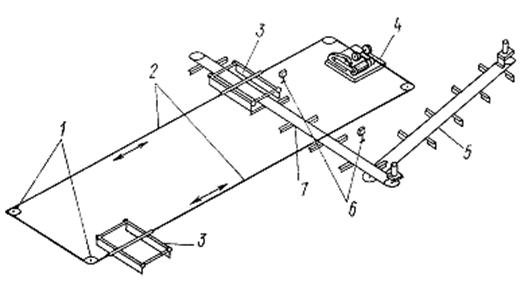
Рисунок 6 Технологічна схема установки для прибирання посліду типу МПС: 1 – поворотний пристрій; 2 – трос; 3 – скребковий візок; 4 – приводна станція установки; 5,7 – транспортер типу ТСН-3,0Б; 6 – кінцеві вимикачі.
Схема канатно-скребкової установки типу МПС зображена на рисунку 6. Установки бувають одно - і двовізкові, тому залежно від кількості каналів у пташнику їх можна комплектувати для одно-, дво-, три-, чотири - та шестиканальних схем. Скребковий візок має раму з чотирма колесами і два скребки з канатом.
Рисунок 7 Принципова електрична схема установки для прибирання посліду типу МПС.
Приводна станція складається із зварної рами, на якій встановлені електродвигун, редуктор, приводний і натяжний барабан. Обертання від електродвигуна до редуктора передається клинопасовою передачею. Для натягання пасів електродвигун переміщують у поздовжніх пазах рами. Транспортер скребковий укомплектований складальними одиницями серійних скребкових конвеєрів типу ТСН-3,0Б або ТСН-160А.
В автоматичному режимі програмне реле КТ вмикає магнітний пускач КМ1, який силовими контактами вмикає електродвигун скребкового механізму і пускачем КМ3 двигуни поперечного та вивантажувального транспортерів ТСН. При досяганні скребками кінцевого вимикача SQ1 він спрацьовує і своїми розмикаючим контактом вимикає магнітний пускач КМ1, а замикаючим контактом вмикає магнітний пускач КМ2 для реверсування двигуна скребкового механізму. Установа вимикається за допомогою кінцевого вимикача SQ2 при досяганні скребкового механізму початкового положення.
В ручному режимі установка вмикається кнопкою SВ2 для руху механізму вперед, для руху в зворотному напрямку кнопкою SВ3. Зупинка здійснюється за допомогою кнопки SВ1.
У системах де відбувається об'єднання декількох технологічних операцій у загальну потокову лінію найчастіше спільно проектуються лінії збирання посліду, видалення з приміщення та транспортування в сховище. Для керування потоковими лініями прибирання посліду передбачають місцеве, дистанційне та автоматизоване керуванням електроприводами машин і механізмів. Системи автоматизації повинні забезпечувати послідовність автоматичного і ручного включення машин і механізмі в порядку, зворотному напрямку руху посліду, щоб виключити завал установок і зупинку лінії в заданій послідовності у випадку аварійної зупинки однієї з установок; контроль і сигналізацію роботи всіх машин і механізмів.
Література : Л1- І.І. Мартиненко . Автоматизація технологічних процесів. - ст 149-152
ЛЕКЦІЯ №11