

5.3 Определяем используемые сигналы ввода и вывода
Теперь когда мы задали основные настройки, пора определить какие сигналы ввода и вывода мы будем использовать и какие из параллельных портов и ножек будут использоваться для каждого. Документация к breakout board может подсказать какие вывода можно использовать если она предназначалась для работы с Mach3 или в комплекте поставки может идти файл профиля (.XML) где эти соединения уже определены
5.3.1 Используемые сигналы вывода Осей и Шпинделя
Сначала посмотрим на закладку Motor Outputs. Она показана на рисунке 5.4.
Определите какие из приводов подключены к осям X, Y и Z и кликните чтобы поставить пометку для Включения этих осей. Если ваше интерфейсное оборудование (например шаговый драйвер Gecko 201) требует сигнал активного low убедитесь что в этих столбиках отмечены сигналы Шага и Направления.
Если у вас есть оси вращения или подчиненные оси то вам придется включить и настроить их.
Если скорость вашего шпинделя будет управляться вручную, то с этой закладкой мы закончили.
Нажмите кнопку Применить чтобы сохранить изменения на этой закладке.
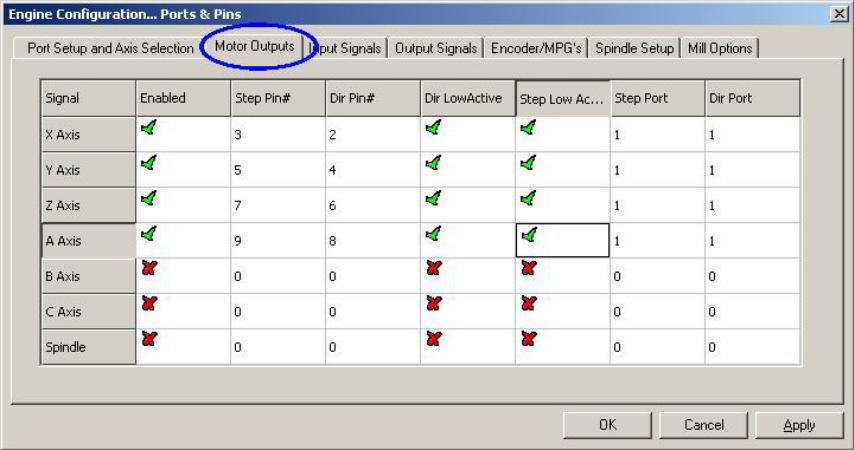
Рисунок 5.4 – Определяем подключения для осей и управляемого шпинделя
Если ваша скорость шпинделя будет контролироваться Mach3 то Вам необходимо включить шпиндель и
выделяется Шаг контактный / порт для него, если он использует широтно-импульсной модуляцией контроль с реле для управления
его направление или выделить Шаг и направление контактов / портов, если он имеет полный контроль. Вы должны
также определить, если эти сигналы активны-ло. Когда закончите, нажмите кнопку Применить, чтобы сохранить
Данные на этой закладке.
5.3.2 Входные сигналы, которые будут использоваться
Теперь выберите вкладку входных сигналов. Это будет выглядеть как на рисунке 5.5.
Будем считать, что вы выбрали один из дома / предельных стратегий от главы 4.6.
Если вы использовали стратегию один и концевые выключатели соединены вместе и вызвать
ESTOP или отключить приводам через приводной электроники, то вам не проверить любой из
Ограничьте входов.
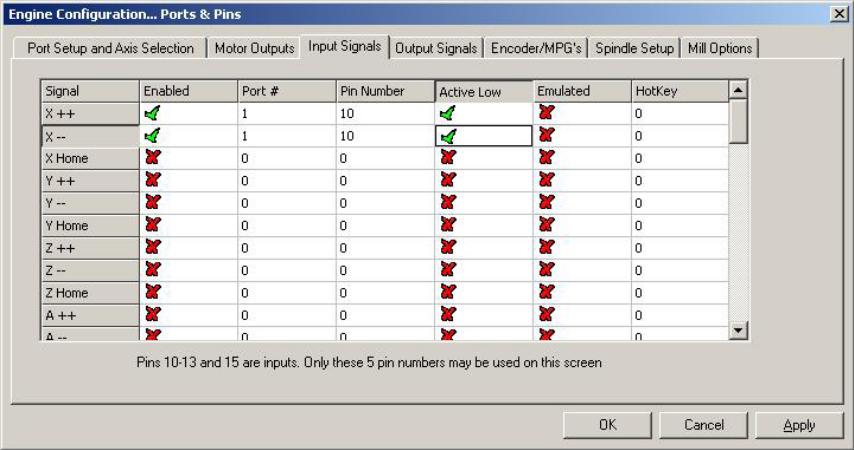
Рисунок 5.5 - Входные сигналы
С стратегии два вы, вероятно, есть домашние переключателей на X, Y и Z осей. Включить
Главная переключается коробки для этих осей и определить порт / Закрепить в которой каждый подключен .
При совмещении пределы и домашний переключатель , то вы должны включить Limit - ,
Предел + + для дома для каждой оси и выделить тот же палец к дому, Limit- и Limit + +.
Обратите внимание на полосу прокрутки, чтобы доступ к остальной части таблицы , которая не видна на рисунке 5.5.
Вход # 1 отличается тем, что он может быть использован для подавления запуска программы обработки детали , когда безопасности
Охранники не на месте . Остальные три ( и # 1, если не используется для охраны блокировкой ) являются
доступны для личного пользования, а может быть проверена в коде макросов. Вход # 4 может быть
используется для подключения внешнего кнопочного переключателя для реализации одной функции Step. вы
возможно, пожелают , чтобы настроить их позже.
Включение и определить Индекс Pulse если у вас есть датчик шпинделя с помощью только одного слота или знака .
Включить и определяют пределы Override , если вы позволили Mach2 контролировать свои концевые выключатели и
у вас есть внешнюю кнопку, вы нажимаете , когда вам нужно бегать от предела. Если вам
нет переключатель , то вы можете использовать экранную кнопку для достижения того же функцию .
Включение и определить ESTOP чтобы указать Mach3 , что пользователь потребовал чрезвычайной ситуации
остановить .
Включение и определяют входы OEM триггера , если вы хотите электрические сигналы , чтобы быть в состоянии назвать OEM
кнопка функционирует без кнопки экрана должна быть оказана .
Включение и определить Timing если у вас есть датчик шпинделя с более чем одним слотом или знака .
Включить зонд для оцифровки и THCOn , THCUp и THCDown для управления плазме
факел .
Если у вас есть один параллельный порт , то у вас есть 5 доступных входов ; с двумя портами есть 10
(или с контактами от 2 до 9 определяется как входов, 13 ) . Очень часто , чтобы найти , что вам не хватает
входные сигналы , особенно если вы также будете иметь несколько входов для стеклянных чешуек или другой
кодеры . Возможно, вам придется пойти на компромисс , не имея такие вещи, как физический предел Override
переключения сохранить сигналы !
Вы также можете рассмотреть вопрос об использовании эмулятор клавиатуры для некоторых входных сигналов .
Нажмите кнопку Применить , чтобы сохранить данные на этой вкладке .
Эмулированные входные сигналы
5.3.4 Если вы проверьте столбец эмулируется для входа, после чего номер порта / Pin и активно-ло государство
для этого сигнала будут проигнорированы, но запись в колонке Hotkey будет интерпретироваться. когда
сообщение ключ-вниз получено с кодом, который соответствует значение Hotkey то, что сигнал
считается активным. Когда сообщение ключ-до получения затем он не включен.
Ключ-вверх и ключ-вниз сигналы, обычно исходят из клавиатуры эмуляторе (как
Ultimarc ИФАВ или Хагстром), который срабатывает с помощью переключателей, подключенных к его входам. это
позволяет более переключателей для зондирования, чем запасных контактов на ваших параллельных портов, но может быть
значительные временные задержки до изменения переключатель видел и действительно ключ-вверх или ключ-вниз
Сообщение может заблудиться на Windows.
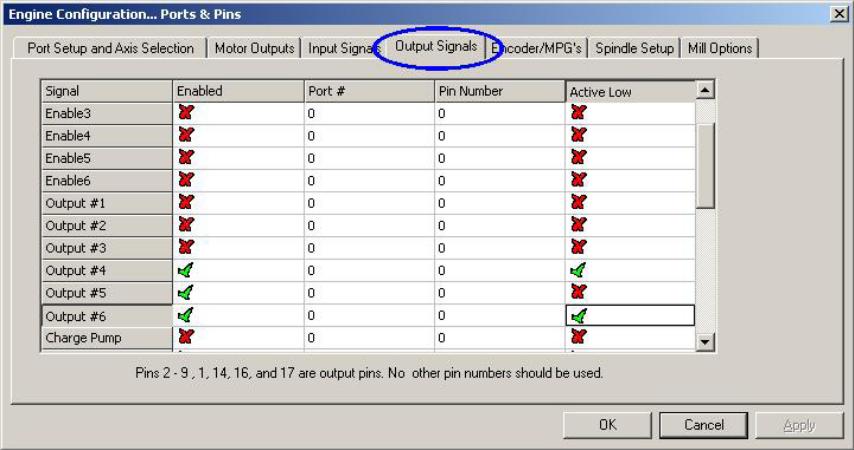
Фигура 5.6 - Выход сигналы
Эмулированные сигналы не могут быть использованы для индекса или сроков и не должны использоваться для ESTOP .
5.3.4 Выходные сигналы
Используйте вкладку Выходные сигналы для определения выходов вы требуете. См. рисунок 5.6.
Вы, вероятно, только хотите использовать один Включите выход ( как и все осевые приводы могут быть
подключен к ней). Действительно , если вы используете заряда функцию насоса / импульсный монитора , то вы
может позволить своим приводам с его выхода .
Выхода # сигналы для использования , для управления стоп / старт шпинделя (по часовой стрелке и, возможно,
против часовой стрелки ), насосы охлаждающей жидкости наводнений и тумана или клапаны и для контроля собственной жизни
индивидуальные кнопки Mach3 или макросы .
Charge Pump линия должна быть включена и определяется , если ваш прорыв доска принять это
импульсный вход постоянно подтверждают правильность работы Mach3 . Зарядка насос 2 используется, если
у вас есть второй прорыва доска подключен ко второму порту или хотите проверить
работа самой второй порт.
Нажмите кнопку Применить , чтобы сохранить данные на этой вкладке .
5.3.5 Определение входов датчиков
Вкладка кодер / МПГ используется для определения соединения и разрешение линейных
кодеры или ручной Генераторы импульсов ( MPGS ) используется для бега осей .
Вкладка кодер / МПГ используется для определения соединения и разрешение линейных
кодеры или ручной Генераторы импульсов (MPGS) используется для бега осей. Она описывается здесь
для полноты описания Config> Порты и Пен.
Этот диалог не нуждается в активной ло столбец как, если датчики рассчитывать не в ту сторону это
просто необходимо поменять флажки выделенные для входов А и В.
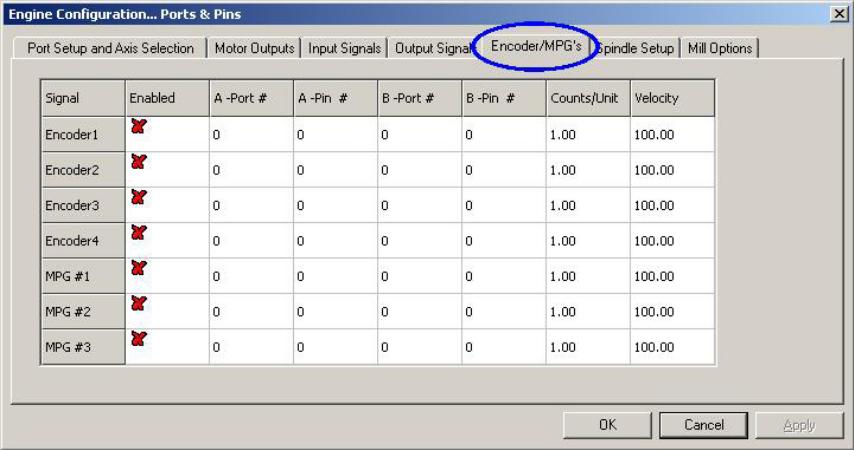
Рисунок 5.7 - Входы датчиков
5.3.5.1 кодеры
Графы на единицу стоимости должен быть установлен, чтобы соответствовать разрешению энкодера. таким образом
линейная шкала с решениями на 20 микрон производит подсчет каждые 5 мкм (помните
квадратурного сигнала), то есть 200 импульсов в единицу (мм). Если вы Родные единиц устанавливается как
дюймов было бы 200 х 25,4 = 5080 отсчетов за единицу (дюйма). Значение скорости не
используется.
5.3.5.2 МПГ
Графы на единицу стоимости используется для определения количества квадратурных пунктам, которые должны быть
Генерация Mach3, чтобы увидеть движение MPG. Для 100 CPR кодера, фигура 2 будет
подходит. Для более высоких разрешениях вы должны увеличить эту цифру, чтобы получить механическое
Чувствительность вы хотите. Мы находим 100 хорошо работает с 1024 CPR кодеров.
Значение скорости определяет масштабирование импульсов отправлен к оси под контролем
Столько-то миль на галлон Чем ниже значение приведены в скорости быстрее ось будет двигаться. Его значение лучше
установить опытным путем, чтобы дать лучшую скорость, когда спиннинг MPG так быстро, как это
комфортно.
5.3.6 Настройка шпиндель
Следующая закладка на Config> Порты и Пен является шпинделя установки. Это используется для определения способа в
которой ваш шпинделя и охлаждающей жидкости, которые подлежат контролю. Вы можете выбрать, чтобы Mach3 делать
ничего с ним, чтобы включить шпиндель и выключается или иметь полный контроль над своей скоростью, используя
Широтно-импульсной модуляцией (ШИМ) сигнала или шаг и направление сигнала.Диалоговое окно, в
Рисунок 5.8.
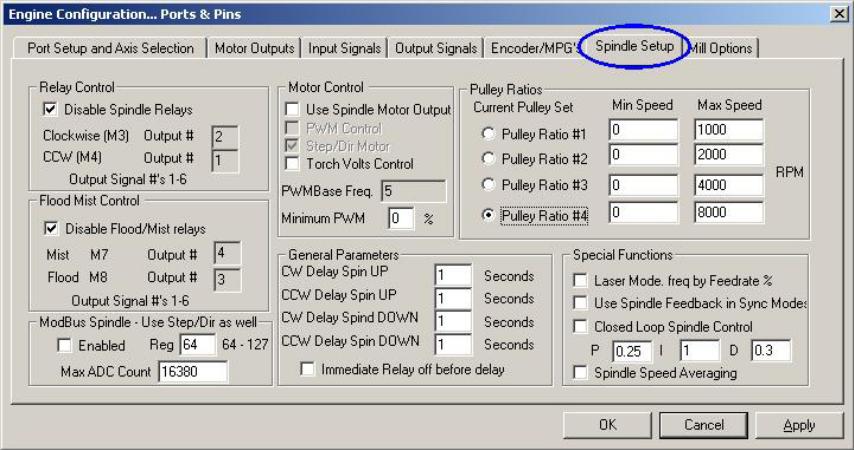
Figure 5.8 – Spindle Setup
5.3.6.1 Контроль охлаждающей жидкости
Код М7 может обернуться Flood охлаждающую жидкость на М9 может превратить Mist охлаждающую жидкость на и М9 может превратить все
охлаждающей жидкости от . Контроль разделе Наводнение Туман из диалоговых определяет, какие из выходных сигналов
должны быть использованы для реализации этих функций. Порта / Пальцы для выходов уже были
определены на вкладке выходных сигналов.
Если вы не хотите использовать эту функцию проверить Отключить Flood / тумана реле .
5.3.6.2 шпинделя управления реле
Если скорость вращения шпинделя управляется вручную или с помощью ШИМ-сигнала , то можно определить Mach3
его направление и когда начать и остановить его ( в ответ на M3, M4 и M5 ) с использованием двух
выходов. Порта / Пальцы для выходов уже определены на вкладке выходных сигналов.
Если вы контролируете шпиндель за шагом и направление , то вам не нужны эти элементы управления. М3,
M4 и M5 будет контролировать импульсов генерируется автоматически.
Если вы не хотите использовать эту функцию проверить Отключение шпинделя реле .