

39. Расчёт промежуточной корректировочной скорости подъёмной установки для компенсации ошибки по пути.
Применение задатчика интенсивности на входе системы регулирования, то есть задание скорости в функции времени приводит к погрешностям по пути в конце цикла. В связи с этой погрешностью неизбежным является участок дотягивания на тахограмме, а также разброс точки перехода на дотягивание в зависимости от концевой нагрузки. Это влечёт за собой удлинение участка дотягивания на тахограмме, который должен быть не короче ошибки по пути, накопленной в процессе снижения скорости. Для того, чтобы уменьшить потерю времени на корректировку ошибки по пути вводят промежуточную корректировочную скорость vk (рисунок 5.12). Протяжённость участка, где должна поддерживаться скорость vk, должна быть не менее накопленной на участке снижения скорости погрешности по пути s1:
![]() (5.10)
(5.10)
где δv – ошибка по скорости. Протяжённость участка, где необходимо поддерживать скорость дотягивания должна быть не менее:
![]() (5.11)
(5.11)
где ∆s2 − ошибка по пути на участке дотягивания. Общее время корректировки − это превышение длительности цикла из−за накопления ошибок ∆s1 и ∆s2:
Оно равно:
![]() (5.14)
(5.14)
Для того, чтобы определить оптимальное значение vk, необходимо найти минимум функции τ=f(vk):
 (5.15)
(5.15)
Отсюда:
![]()
Кривые τ=f(vk) − рисунок (5.13) построены для следующих сходных данных:
V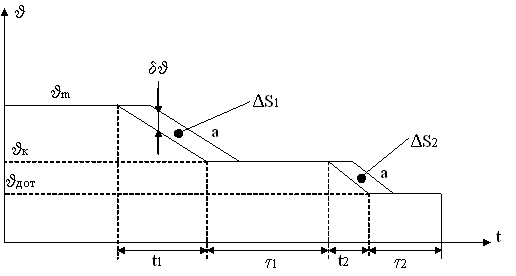
 дот=0.5
м/с; a=0.75
м/с2;
δv=0.5
м/с. Эти кривые подтверждают важность
установления оптимальной vk.
Чем больше vmax,
тем больше выигрыш производительности
при правильном выборе vk.
дот=0.5
м/с; a=0.75
м/с2;
δv=0.5
м/с. Эти кривые подтверждают важность
установления оптимальной vk.
Чем больше vmax,
тем больше выигрыш производительности
при правильном выборе vk.
Рисунок 5.12 Тахограмма конечного участка пути подъёмного сосуда при введении промежуточной корректировочной скорости
Рисунок 5.13 Зависимость времени корректировки от корректировочной скорости для различных m
40. Требования к точности системы управления шахтной подъёмной установкой.
Предпочтительными для управления приводом шахтной подъёмной установки являются астатические системы автоматического управления, но могут применяться и статические системы автоматического управления повышенной точности. Для статической системы автоматического управления установившаяся ошибка поддержания максимальной скорости должна быть в пределах:
![]()
где
δ3СVm
− относительное значение установившейся
ошибка по скорости с максимальной
скоростью, ∆v
− абсолютное значение установившейся
ошибки по скорости при движении с
максимальной скоростью. Оно не должно
выходить за указанные пределы при
изменении нагрузки на валу двигателя:
для клетевого подъёмника −
![]() для скиповых
подъёмников −
для скиповых
подъёмников −
![]()
При движении со скоростью дотягивания ошибка по скорости должна лежать в пределах:
![]()
где D − диапазон регулирования скорости. Обычно статическая ошибка со скоростью дотягивания должна быть меньше или равна 10%. Тогда коэффициент усиления системы автоматического управления равен:
![]() (5.16)
(5.16)
Динамическая ошибка δVдин в режиме установившегося слежения с amax принимается на уровне статической ошибки:
![]()
где v3(t) − заданная скорость, vд(t) − действительная скорость. Для точного выполнения заданной диаграммы скорости вне зависимости от нагрузки астатической системы автоматического управления достаточно обладать астатизмом первого порядка для отработки задающего программного воздействия по линейному закону и астатизмом второго порядка по возмущающему воздействию в виде нагрузки, изменяющейся от цикла к циклу.
При применении системы подчинённого регулирования для выполнения указанных условий регулирующее воздействие должно быть результатом двукратного интегрирования. При использовании астатической системы автоматического управления ошибки в установившемся режиме являются ошибками задания скорости δ3СVпрогр и измерения действительной скорости δТГ. Тогда ошибка задания равна:
![]()