

Угол между плоскостями. Расстояние от точки до плоскости
Пусть заданы две плоскости Q1 и Q2:
![]()
Под углом между плоскостями Q1 и Q2 понимается один из двугранных углов, образованных этими плоскостями.
Угол
между нормальными
векторами ![]() и
и ![]() плоскостей
Q1 и
Q2равен
одному из этих углов (см. рис. 72).
плоскостей
Q1 и
Q2равен
одному из этих углов (см. рис. 72).

Для нахождения острого угла следует взять модуль правой части.


Если
плоскости Q1 и
Q2 перпендикулярны
(см. рис. 73, а), то таковы же их нормали,
т. е. ![]() (и
наоборот). Но тогда
(и
наоборот). Но тогда ![]() ,
т. е.
,
т. е. ![]() .
Полученное равенство есть условие
перпендикулярности двух плоскостей
Q1 и
Q2.
.
Полученное равенство есть условие
перпендикулярности двух плоскостей
Q1 и
Q2.
Если
плоскости Q1 и
Q2 параллельны
(см. рис. 73, б), то будут параллельны и их
нормали ![]() и
и ![]() (и
наоборот). Но тогда, как известно
координаты векторов пропорциональны:
(и
наоборот). Но тогда, как известно
координаты векторов пропорциональны: ![]() .
Это и есть уcловиє параллельности двух
плоскостей Q1 и
Q2.
.
Это и есть уcловиє параллельности двух
плоскостей Q1 и
Q2.
Расстояние от точки до плоскости
Пусть
задана точка
и
плоскость Q своим уравнением ![]() .
Расстояние d от точки
до
плоскости Q находится по формуле
.
Расстояние d от точки
до
плоскости Q находится по формуле

Вывод
этой формулы такой же, как вывод формулы
расстояния от точки ![]() до
прямой
до
прямой![]() .
.
Расстояние
d от точки M0 до
плоскости Q равно модулю проекции
вектора ![]() ,
где
,
где ![]() —
произвольная точка плоскости Q,
на н
—
произвольная точка плоскости Q,
на н аправление
нормального вектора
аправление
нормального вектора ![]() (см.
рис. 74). Следовательно,
(см.
рис. 74). Следовательно,
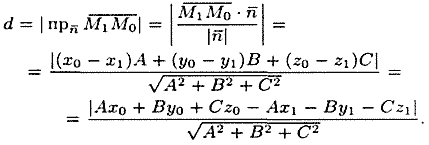
А так как точка принадлежит плоскости Q, то
![]()
Поэтому  .
Отметим, что если плоскость Q задана
уравнением
.
Отметим, что если плоскость Q задана
уравнением ![]() ,
то расстояние от точки
,
то расстояние от точки ![]() до
плоскости Q может быть найдено по формуле
до
плоскости Q может быть найдено по формуле
![]()
Вывод канонического и общего уравнения прямой в пространстве. Переход между ними.
Пусть
даны точка М 0 и
вектор ![]() .
Требуется найти уравнение плоскости,
проходящей через точку М 0 перпендикулярно
вектору
.
Возьмем
на искомой плоскости произвольную
точку М и
рассмотрим
.
Требуется найти уравнение плоскости,
проходящей через точку М 0 перпендикулярно
вектору
.
Возьмем
на искомой плоскости произвольную
точку М и
рассмотрим ![]() и
и ![]() —
радиусы-векторы точек М и М 0.
Вектор
—
радиусы-векторы точек М и М 0.
Вектор ![]() лежит
на плоскости и, следовательно, ортогонален
вектору
,
что равносильно векторному равенству
(
–
лежит
на плоскости и, следовательно, ортогонален
вектору
,
что равносильно векторному равенству
(
–![]() )·
=
0. Полученное уравнение
называется векторным уравнением
плоскости.
Переписав это уравнение
в координатной форме, получим уравнение
плоскости, проходящей
через точку перпендикулярно
вектору:
A (x – x 0)
+ B ( y – y 0 )
+ C (z – z 0 )
= 0. В полученном уравнении x 0, y 0 и z 0 —
координаты точки М 0,
а А, В и С —
координаты вектора
,
который называется вектором
нормалиплоскости.
Раскрыв
скобки в полученном уравнении и обозначив
число – A x 0 – B y 0 – С z 0 через D,
получим общее уравнение
плоскости: A x + B y + С z + D =
0. В этом уравнении коэффициенты А, В и С при
переменных являются координатами
вектора нормали.
Если А =
0, то уравнение примет вид B y + С z + D =
0, нормаль
=
(0; В; C)
перпендикулярна оси ОХ,
а сама плоскость, следовательно,
параллельна этой оси. Если В =
0, то уравнение примет вид A x + С z + D =
0, нормаль
=
(А;
0; C)
перпендикулярна оси ОY,
а сама плоскость параллельна оси ОY.
Если С =
0, то уравнение примет вид A x + B y + D =
0, нормаль
=
(А; B;
0) перпендикулярна оси ОZ,
а сама плоскость параллельна оси ОZ.
Если D =
0, то уравнение A x + B y + С z =
0 задает плоскость, проходящую через
начало координат.
)·
=
0. Полученное уравнение
называется векторным уравнением
плоскости.
Переписав это уравнение
в координатной форме, получим уравнение
плоскости, проходящей
через точку перпендикулярно
вектору:
A (x – x 0)
+ B ( y – y 0 )
+ C (z – z 0 )
= 0. В полученном уравнении x 0, y 0 и z 0 —
координаты точки М 0,
а А, В и С —
координаты вектора
,
который называется вектором
нормалиплоскости.
Раскрыв
скобки в полученном уравнении и обозначив
число – A x 0 – B y 0 – С z 0 через D,
получим общее уравнение
плоскости: A x + B y + С z + D =
0. В этом уравнении коэффициенты А, В и С при
переменных являются координатами
вектора нормали.
Если А =
0, то уравнение примет вид B y + С z + D =
0, нормаль
=
(0; В; C)
перпендикулярна оси ОХ,
а сама плоскость, следовательно,
параллельна этой оси. Если В =
0, то уравнение примет вид A x + С z + D =
0, нормаль
=
(А;
0; C)
перпендикулярна оси ОY,
а сама плоскость параллельна оси ОY.
Если С =
0, то уравнение примет вид A x + B y + D =
0, нормаль
=
(А; B;
0) перпендикулярна оси ОZ,
а сама плоскость параллельна оси ОZ.
Если D =
0, то уравнение A x + B y + С z =
0 задает плоскость, проходящую через
начало координат.
Пусть
в трехмерном пространстве
зафиксирована прямоугольная
система координат Oxyz.
Зададим в ней прямую. Выберем
следующий способ
задания прямой линии в пространстве:
укажем точку, через которую проходит
прямая a,
и направляющий вектор прямой a.
Будем считать, что точка ![]() лежит
на прямой а и
лежит
на прямой а и ![]() - направляющий
вектор прямой а.
- направляющий
вектор прямой а.
Очевидно,
что множество точек ![]() трехмерного
пространства определяет прямую атогда
и только тогда, когда векторы
трехмерного
пространства определяет прямую атогда
и только тогда, когда векторы ![]() и
и ![]() коллинеарны.
коллинеарны.

Запишем необходимое
и достаточное условие коллинеарности
векторов
и
в
координатной форме. Для этого нам нужно
знать координаты этих векторов. Координаты
вектора
нам
известны из условия. Осталось вычислить
координыты вектора
-
они равны разности соответствующих
координат точек
и
,
то есть, ![]() (при
необходимости смотрите нахождение
координат вектора по координатам точек).
Теперь записываем условие коллинеарности
векторов
и
:
(при
необходимости смотрите нахождение
координат вектора по координатам точек).
Теперь записываем условие коллинеарности
векторов
и
:
 ,
где
,
где ![]() -
произвольное действительное число
(при
-
произвольное действительное число
(при ![]() точки
и
совпадают,
что нас тоже устраивает).
точки
и
совпадают,
что нас тоже устраивает).
Если ![]() ,
то каждое уравнение системы
,
то каждое уравнение системы  можно
разрешить относительно параметра
и
приравнять правые части:
можно
разрешить относительно параметра
и
приравнять правые части:

Полученные
уравнения вида  в
заданной прямоугольной системе
координат Oxyz определяют
прямую a.
Уравнения
есть канонические
уравнения прямой в трехмерном
пространстве в
прямоугольной системе координат Oxyz.
Их также называют уравнениями
прямой в пространстве в каноническом
виде.
в
заданной прямоугольной системе
координат Oxyz определяют
прямую a.
Уравнения
есть канонические
уравнения прямой в трехмерном
пространстве в
прямоугольной системе координат Oxyz.
Их также называют уравнениями
прямой в пространстве в каноническом
виде.
Пример.
Привести общие уравнения прямой ![]() к
каноническому виду.
к
каноническому виду.
Решение.
Найдём точку, лежащую на прямой. Для
этого выберем произвольно одну из
координат, например, ![]() и
решив систему уравнений
и
решив систему уравнений ![]() найдем
найдем ![]() .
.
Нормальные
векторы плоскостей, определяющих прямую,
имеют координаты ![]() ,
, ![]() .
Поэтому направляющий вектор прямой
будет
.
Поэтому направляющий вектор прямой
будет ![]() .
Следовательно,
.
Следовательно, ![]() .
.