

V.2.9. Сканування фотознімків
По суті, диференційне перетворення або ортофототрансформування зображень також є скануванням. Проте розміри квадратів - "елементів зображення" були значні і виражались в одиницях-десятках міліметрів. У цифровій фотограмметрії йдеться про сканування малих елементів зображень -пікселів, розміри яких становлять тисячні частки міліметра (мікрони). Проте принципова суть сканування така сама, як і продемонстрована на рис. V.2.4.
Нагадаємо, що скануванням або дігіталізацією називають перетворення звичайного фотознімка на цифрову форму. Щоб не втратити жодної інформації, яку дає фотознімок, потрібно інтервал сканування узгодити з роздільною здатністю знімка. Роздільну здатність (РЗ) задають у кількості ліній на один міліметр (лін/мм), тобто роздільна здатність означає, скільки штрихів та проміжків між ними можна розрізнити на відрізку в 1 мм. Теоретичні розрахунки з урахуванням тільки дифракції дають навіть 250 лін/мм.
Насправді, на практиці, враховуючи інші недоліки лінз - "зернистість" фотознімка, контрастність - ці можливості значно менші, приблизно РЗ = 100 лін/мм. Кутова роздільна здатність (КРЗ) = 35". Фактична середня монокулярна гострота зору людини становить ЗО". У геодезії критичний кут зору звичайно беруть 60". Згідно з теоремою про сканування можна отримати такий інтервал сканування:
![]()
552
Розділ V
На практиці чисельник беруть таким, що дорівнює 0,7, тобто:
Д#,мм = 0,7/(2-РЗ).
Для знімка низької контрастності роздільна здатність становить 50 лін/мм. Тоді АД = 0,7/(2-50)= 0,007 мм = 7 цм . Розмір пікселів менше за 7 цм у наш час вже досягнуто. Проте інтервал сканування не можна порівнювати із сенсорною величиною (світлочутливого) елемента сканера. Тільки під час ідеального сканування інтервал сканування та величина сенсорного елемента ідентичні. Тільки тоді маємо ідеальну схему сканування, показану на рис. V.2.5. У деяких сканерах інтервал сканування дуже малий, а розмір сенсора значно більший. Тоді буде перекриття пікселів з певним розтягуванням вихідної інформації.
Зі зменшенням пікселів зростає співвідношення сигнал-шум, тобто наявні спотворення і згасання корисного сигналу. Строге розв'язання цієї неузгодженості виконане далеко не у всіх сучасних сканерах. Залежно від розташування детекторів - світлочутливих сенсорів розрізняють три різні конструкції сканерів:
Один детектор, який проходить над знімком по рядках (послідовно). Відомі фірми Hell, Optronigs, Scitex.
Ряд детекторів по рядках рухаються над знімком. В одному ряді розміщені 2048 детекторів. Найменша величина піксела - 7,5 мм. Точність визначення позиції- 1 мм. За цим принципом працюють Photoscan PS1, фірми Zeiss та Intergraph.
553
Автоматизація наземних топографо-геодезичних робіт...
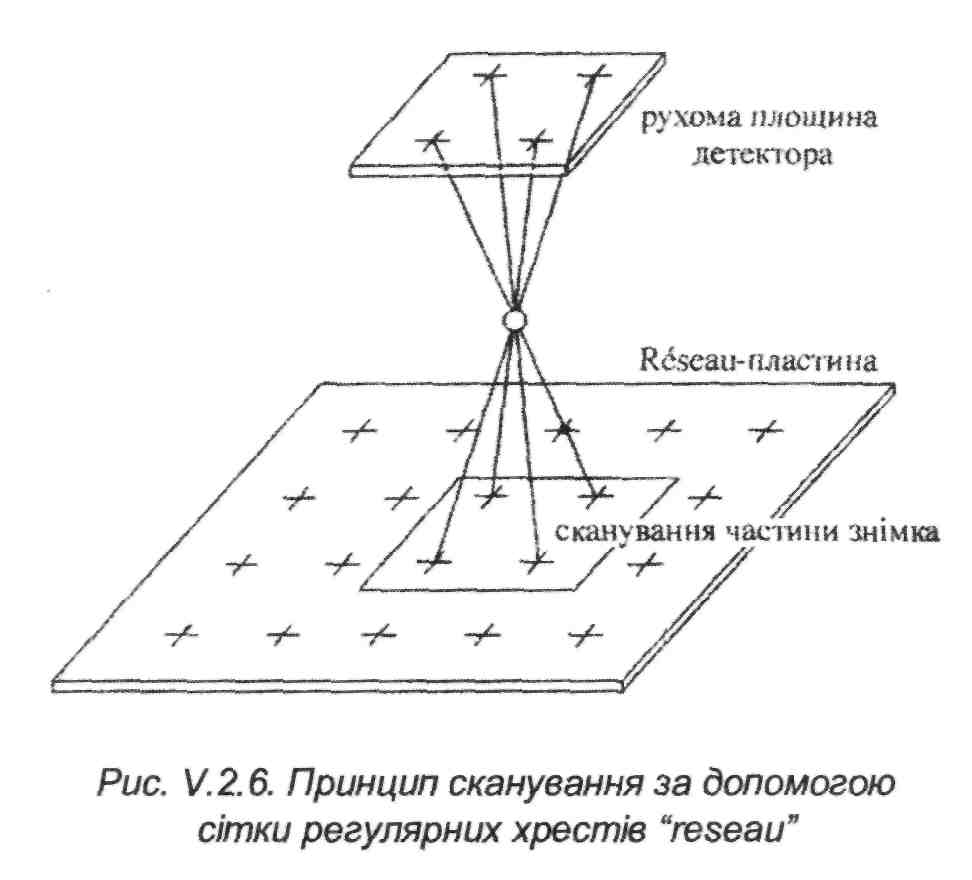
3. Квадратна матриця детекторів записує частину знімка. Ці частини знімка можна об'єднати за допомогою сітки регулярних хрестів. У західній літературі сітку хрестів називають "reseau", що в перекладі із французької означає "сітка" (рис. V.2.6).
За цим принципом працює сканер RS1 фірми Rollej та сканер VX фірми Vexel. Є дві технології використання "сітки". Перша: на фотознімок зверху накладають сітку з награвійованими хрестами, а після цього виконують сканування. Друга: наявність сітки у фокальній площині фотокамери або у площинах знімка.