

V.1.7. Електронна тахеометрія
Рис. V.1.1. Принцип вимірювання кутів a maz, нахиленої віддалі S на рухому або нерухому призму
Як відомо, тахеометрія призначена для визначення положення пунктів на основі вимірів горизонтального кута а, вертикального (зенітного) кута z та нахиленої віддалі S до призми, що рухається або встановлена нерухомо.

526
Розділ V
Кути z, а та нахилена віддаль S вимірюються автоматично. На сучасних штангах призм-відбивачів світла додатково кріпляться:
Сенсори-пристрої для відшукування й автоматичного наведення труби тахеометра на рухому або нерухому призму.
Радіомодуль (або лазерний модуль) з графічним дисплеєм і клавіатурою (подібною на ту, що в тахеометрі) для дистанційного керування тахеометром (із точки встановлення призми).
Комп'ютер із системою електронного опрацювання даних та пам'яттю, дисплеєм, клавіатурою, бібліотекою програм вимірювань.
Середні похибки вимірювання сучасними тахеометрами, наприклад, фірми Leica TPS 1100:
середня похибка вимірювання кутів maZ =1,5";
середня похибка вимірювання віддалі S, ms =2+2S (km) mm;
максимальна віддаль - 3 км;
час вимірювання -1с;
графічне відображення - 8 ліній по 32 знаки;
вага - 4,7 кг.
Рис. V. 1.2. До виведення формули тригонометричного нівелювання
Зрозуміло, що за такої точності вимірювання тахеометр може використовуватися не тільки для топографічного знімання, але і для розв'язання багатьох задач інженерної геодезії та геодинаміки.

527
Автоматизація наземних топографо-геодезичних робіт...
На закінчення подамо формули, за якими визначається перевищення h. Ця формула дещо інша, ніж у класичній тахеометрії і враховує безпосереднє вимірювання тахеометром нахиленої віддалі [ЗО]. Безпосередньо з рис. V.1.2 маємо:
![]() (V.1.3)
(V.1.3)
Ця формула не враховує кривини Землі і рефракції. Проте поправки можуть бути введені окремо.
V. 1.8. Автоматичні координатографи
Автоматичні координатографи (АК) є системами, що складаються з:
Координатографа.
Обчислювальної машини (ОМ), комп'ютера.
Робочих пристроїв та приладів.
Допоміжного обладнання.
Координатограф складається зі стола, на якому розташовують план чи карту, та обвідного, рухомого пристрою (курсора), що, переміщуючись, вказує точки або лінії, які треба наносити. Робочими приладами є креслярські пера, гравірувальні різці та різні головки. У нових моделях координатографів широко використовуються світлові головки, що можуть гравірувати на пластиках або креслити на фотоплівках та інших основах. Переміщення креслярського пера реалізується автоматично і керується комп'ютером. До допоміжного обладнання належить пульт керування, пристрій введення та виведення інформації. Інформація для АК може подаватися безпосередньо з великої ЕОМ або через проміжні носії: магнітні стрічки, диски тощо. АК використовуються під час виготовлення оригіналів карт та планів на папері, пластиках та інших основах, а також для отримання графічної інформації у вигляді різних проектів, схем, робочих креслень та інших документів.
Існує більше ніж 100 різних систем автоматичних координатографів. Детальне описування їх не має змісту. Описи та рекомендації доцільного застосування координатографів зазвичай подаються у відповідних інструкціях.
V.1.9. Перетворювачі аналогової інформації на цифрову
До перетворювачів аналогової (безперервної) інформації на цифрову (дискретну) належать прилади, що дають змогу перетворювати графічне зображення карт, планів, аерофотознімків та наземних на цифрову форму у вигляді координат точок, що становлять елементи карти, плану, фотознімка.
528
 Розділ
V
Розділ
V
Якщо ці перетворювачі дають змогу додавати цифрові коди для ідентифікації елементів плану, карти, фотознімка, то такі перетворювачі називають дигітайзерами. Ця назва походить від англійського слова digit (цифра). У літературі вживають й інші назви цих приладів: дигіметер, цифрувач.
Дигітайзер, як і координатограф - це також креслярський стіл, по якому рухається обвідний пристрій. Цей рух у вигляді плоских координат точок фіксується на спеціальному дисплеї механічним, електричним або іншим способом.
Перетворювачі дуже широко використовуються для:
складання топографічних карт за картами більшого масштабу;
перетворення фотознімків із центральної проекції на ортогональну проекцію;
складання цифрових карт за графічними картами;
• створення банків топографічних даних. Розрізняють три види дигіталізації:
а) точкова; в) лінійна; с) поверхнева.
Поверхнева дигіталізація ще називається растровим скануванням.
Ці види дигіталізації подано на рис. V.I.3. Перетворювачі класифікуються за певними ознаками. Однією із вдалих класифікацій вважають способи координування вихідних даних. За цією ознакою перетворювачі можна класифікувати на: 1) слідкуючі (обвідні); 2) електронно-променеві (дисплеї); 3) сканери; 4) оптично зчитувальні машини. Більшість перетворювачів належать до обвідних. Лінії відслідковуються, і точки координуються через заданий інтервал.
Дисплеєм називається електронний пристрій, призначений для введення графічної інформації на електронно-променеву трубку (ЕПТ) та виведення інформації після перетворення.
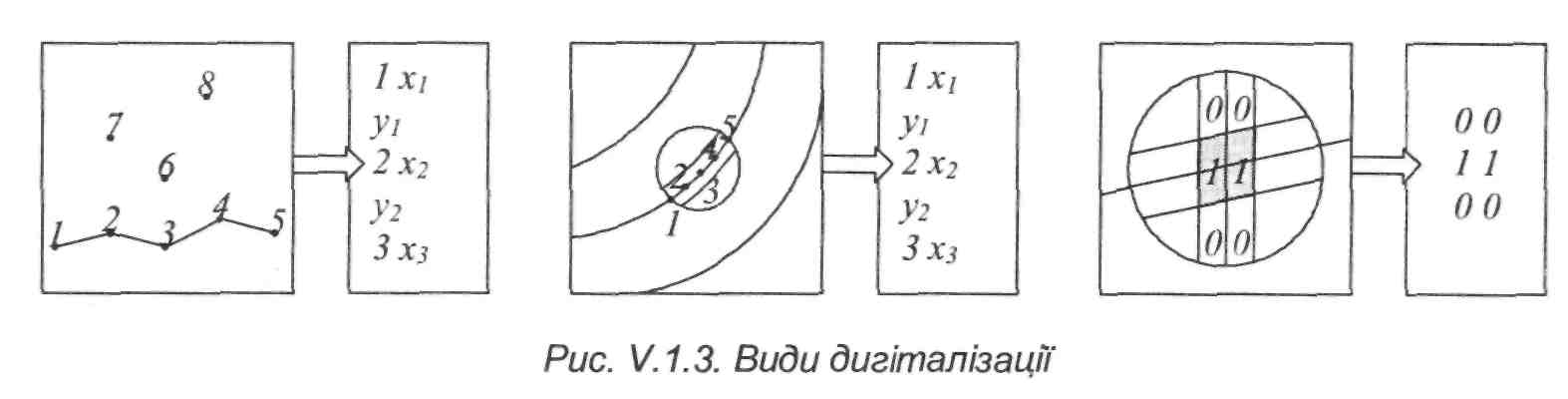
Примітка. Під час площинної дигіталізації пікселами записується ступінь почорніння (сірості) або кольору кожного елемента образу. На рис. V.1.3 показано у колі фрагмент поверхні з найпростішим однобітовим запасом: 1 - відповідає чорному пікселу; 0 - навпаки, пікселу білому.
529
Автоматизація наземних топографо-геодезичних робіт...
Якщо зображеннями на екрані можна керувати (виправляти, витирати, пересувати), то дисплей - інтерактивний; у протилежному випадку - пасивний. Сканери призначені для площинного перетворення. У сканери вмонтовано матриці пікселів, які здатні перетворювати центральні проекції на ортогональні, графічні на цифрові. Сканери - складні електронно-оптичні системи. Кольоровий сканер "Дельта" може опрацьовувати знімки розміром до 470x320 мм і рулонні фільми завширшки до 320 мм. Сканер має 3175 пікселів розміром 8 цм .
Оптичні зчитувальні машини дають змогу читати сторінки з текстом або символами.