

IV.2.6. Розрахунок планової точності та допустимої довжини мензульного ходу
У мензульному ході будуються з певною точністю горизонтальні кути та вимірюються довжини ліній. Тому для розрахунків мензульного ходу можна користуватися формулами, виведеними для кутомірних ходів: полігон о-метричного або теодолітного. Скористаємося відомою формулою для висячого кутомірного ходу:
(IV.2.21)
де
М
-
похибка в положенні кінцевої точки
ходу; [S]-
довжина
ходу; п-кількість
сторін;![]() -
відносна похибка вимірювання сторін;
-
відносна похибка вимірювання сторін;![]() -
абсолютна
-
абсолютна
похибка горизонтальних кутів.
Як видно з (IV.2.21), її перший член зменшується зі збільшенням п; другий член, навпаки, зростає зі збільшенням п. Необхідно знайти екстремальне значення п. Для цього треба (IV.2.21) продиференціювати по п і прирівняти до нуля. Отримаємо:
дп „
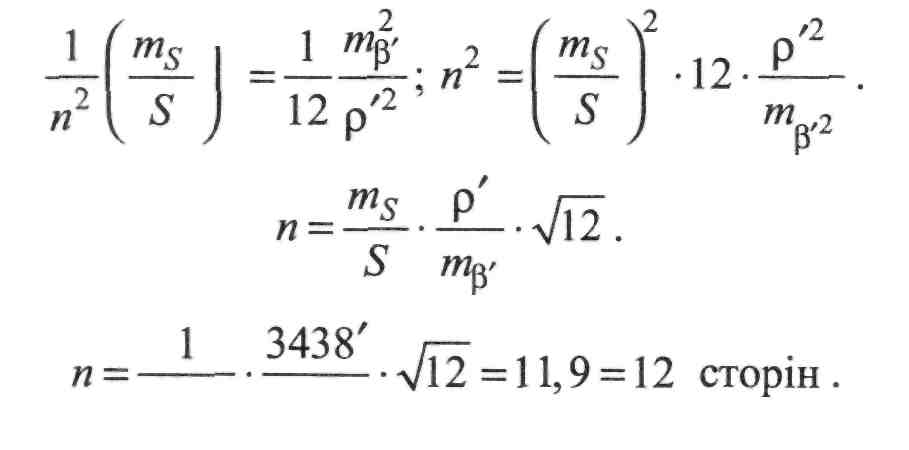
Розв'яжемо (IV.2.22) відносно п:


(IV.2.23)
Довжини
ліній вимірюються у мензульному ході
нитковим віддалеміром. Нехай![]() .
Орієнтування планшета за довгими
лініями можна
.
Орієнтування планшета за довгими
лініями можна
виконати
з похибкою![]()
Підставивши в (IV.2.23) ці числові значення, отримаємо:
![]()
Для![]() м;
[S]
=
200 м • 5 = 1000 м інструкція допускає 1000 м
для
м;
[S]
=
200 м • 5 = 1000 м інструкція допускає 1000 м
для
масштабу 1:5000 та 500 м для масштабу 1:2000.
453
Великомасштабне топографічне знімання
Насправді такі довжини мензульних ходів не можна допускати. Річ у тім, що висячий мензульний хід завдовжки [S] = 1000 м (якщо п = 5; S— 200 м;
![]()
Що 1
= ;![]() матиме
похибку М
= 1,70
м за допустимої (для масштабу
матиме
похибку М
= 1,70
м за допустимої (для масштабу
1:5000), М'доп= 1,0 м (0,2 мм плану).
Недопустимим буде й аналогічний хід, прокладений між точками з відомими координатами. Дещо більше від половини похибки ходу становить похибка графічної п' удови горизонтальних кутів (53 %). Це означає, що під час розрахунків допусків мензульних ходів необхідно обмежувати не тільки довжини ходів, але й кількість сторін. Розрахунки показують, що максимальна довжина мензульного ходу може дорівнювати 600 м (3 лінії по 200 м) і його похибка становитиме 1,08 м, тобто практично дорівнюватиме допустимій для масштабу знімання 1:5000.
Аналогічні розрахунки допустимих мензульних ходів із відносною похибкою вимірювання ліній 1:400 під час знімання в масштабі 1:2000, 1:1000 і 1:500 також показали, що подані в інструкції допустимі довжини ходів та кількість ліній у них завищені.
Нижче, у табл. IV.2.2, подано розраховані допустимі мензульні ходи.
Довжина ходу для масштабу 1:500 розрахована для випадку, коли вимірювання ліній виконується не нитковим віддалеміром, а мірною стрічкою або рулеткою з відносною похибкою 1:1000 або 1:2000, як цього вимагає інструкція.
Таблиця IV. 2.2
Параметри допустимих мензульних ходів під час великомасштабного знімання
Масштаб знімання |
Максимальні довжини ходу, м |
Максимальні довжини ліній, м |
Максимальна кількість ліній у ході |
1:5000 |
600 |
200 |
3 |
1:2000 |
250 |
125 |
2 |
1:1000 |
100 |
50 |
2 |
1:500 |
50 |
50 |
1 |
Хід масштабу 1:500 може складатися із двох ліній по 25 м кожна.
Зауважимо, що в розрахунках допустимої довжини висячих мензульних ходів (саме такі ходи часто використовуються) брались до уваги тільки похибки вимірювання ліній та похибки побудови горизонтальних кутів. Неминучі,
454
 Розділ
IV
Розділ
IV
абсолютні, випадкові похибки відкладання ліній за допомогою циркуля-вимір-ника та поперечного масштабу, які дорівнюють 0,1-0,2 мм плану (граничні - 0,3 мм), практично незалежні від довжин ліній (зазвичай, декілька сантиметрів у цьому масштабі плану), не враховувались.
Тому для компенсації впливу цих похибок доцільно виконувати вимірювання ліній для мензульних ходів мірною стрічкою або рулеткою не тільки під час знімання у масштабі 1:500, але й у масштабах 1:1000, 1:2000, 1:5000.
Заміна висячих ходів ходами між точками з відомими координатами також підвищує їхню точність.
Інструкція дає змогу використовувати під час мензульного знімання геометричну мережу трикутників, але тільки під час знімання у масштабі 1:5000.
IV.2.7. Розрахунок точності та допустимої довжини теодолітного ходу
Нехай теодолітний хід прокладено між відомими пунктами. Скористаємось формулою, виведеною в розділі II:
![]()
Знайдемо екстремальне значення кількості сторін ходу п. Для цього продиференціюємо (IV.2.25) по п і результат прирівняємо до нуля:
дп „2
Після перетворень отримаємо: \2
(IV.2.25)
2000
0,5' Кути
вимірюють теодолітом із точністю
відліку![]() двома
прийомами,
двома
прийомами,
а
труба наводиться на віху з віхоутримувачем.
Тому приймемо![]() Нехай
Нехай
лінії вимірюються стрічкою з відносною похибкою 1/2000.
455
Великомасштабне топографічне знімання
На підставі (IV.2.24) розрахуємо, які довжини ходів можна допускати для різних масштабів знімання.
У класичній геодезії допускаються в два рази більші за допустимі похибки координат Мдоп нев'язки ходів f, , оскільки після зрівноваження ходів
похибки координат зменшаться приблизно вдвічі. Проте тоді значна кількість точок ходу буде мати похибки координат, що дорівнюють допустимим, що для паперових карт небажано, а для ЦММ взагалі не можна допускати, тому що на ЦММ вимірювання координат, довжин виконуються не графічно, а аналітично. У табл. IV.2.3 наведено розрахунки параметрів ходів для Мдоп =
■ 2Мдоп.коР = Адо„ та Для Мдоп = Мдоп.коР- Останні значення параметрів взято в
дужки.
Зрозуміло, що при цьому математична основа карт буде вдвічі точнішою. Сучасні точності вимірювання кутів та ліній дають змогу це реалізувати. Вважаємо, що точнішу математичну основу, а також точніші плани та карти необхідно мати вже сьогодні.
Таблиця IV. 2.3