

IV.2.3. Аналітичні мережі (польові роботи)
Аналітичні мережі, як і тріангуляція - мережі трикутників. Як відомо, існує ще одна побудова, що будується у вигляді трикутників, які межують один
3 одним. У такій мережі кути трикутників не вимірюються, а будуються під час створення робочої основи мензульного знімання. Така мережа називається геометричною. Ми розглянемо мережу трикутників, у яких кути вимірюються. Тому часто в геодезичній літературі такі мережі називають робочими (знімальними) мережами, що будуються методом тріангуляції. Проте, щоб відрізняти ці мережі від геометричної мережі та від тріангуляції, цілком виправдано називати їх аналітичними мережами.
Довжини сторін трикутників аналітичної мережі значно коротші, ніж у тріангуляції (min - 150 м; max - 2 км). Кути не менші за 20°. Кути вимірюються
446
Розділ IV
двома круговими прийомами теодолітами (точності, не нижчої за ЗО") з перевстановленням лімба через 90°. Допустима нев'язка трикутника не більша за 1,5'. Найчастіше використовуються такі аналітичні побудови:
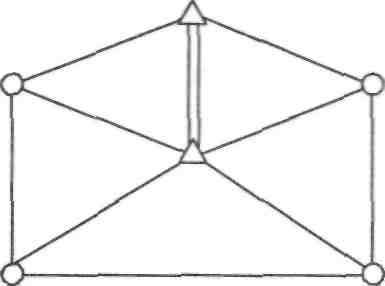
1) геодезичний чотирикутник (рис. IV.2.3, а):



A D М
5) ланка між стороною й пунктом (рис. IV.2.3, д):

447
Великомасштабне топографічне знімання
6) ланка, побудована на стороні (рис. IV.2.3, є):

Нехай під дією похибок dS{ у довжині сторони 5 та в дирекційному куті Joe, точка Р змістилась у положення Р" на величину q . Це зміщення можна розкласти на dS{ - уздовж лінії Sl й на г - перпендикулярно до Sx.

Із трикутника Р Р' Р" маємо:
![]()
Із трикутника N Р Р" (рис. IV.2.4.):
![]()
На підставі (IV.2.5) (IV.2.6) запишеться так:

(IV.2.5) (IV.2.6)
(IV.2.7)
448
Розділ IV
Переходячи від диференціалів до квадратичних похибок, отримаємо:
 (IV.2.8)
(IV.2.8)
Як відомо, у ланках трикутників сторони визначаються з відносними похибками, що описуються формулою
 (IV.2.9)
(IV.2.9)
Переходячи до абсолютної похибки та нехтуючи похибкою в базисі b, одержимо:
![]()
«І, =\s}^{ctg% +ctg% +ctg^ctg^}. (IV.2.10)
Крім того, як відомо
![]()
тщ=ту^-. (IV.2.11)
Формулі (IV.2.8) можна надати вигляду:
 (IV.2.12)
(IV.2.12)
або
 (IV.2.13)
(IV.2.13)
Припустимо,
що аналітична ланка складається з
рівносторонніх трикутників:![]()
Тоді вираз формули (IV.2.13), що в дужках, буде дорівнювати 2. Тому формулі (IV.2.13) можна надати простішого вигляду:
![]() (IV.2.14)
(IV.2.14)
Якщо діють переважно випадкові похибки, тоді їхнє накопичення буде пропорційне до yjn , де п - кількість трикутників ланки.
Похибка кінцевої точки ланки визначиться за формулою
![]()
МР =1,15^ S>[n. (IV.2.15)
449
Р
 Великомасштабне
топографічне
знімання
Великомасштабне
топографічне
знімання
Розрахуємо максимально допустиму кількість трикутників у ланці. Як відомо, гранична похибка в розташуванні робочої основи відносно найближчих пунктів геодезичної основи на плані - 0,2 мм. Для масштабу 1:5000 0,2 мм становить 1 м. Підставивши в (IV.2.15) замість МР 1 м і розв'язавши цю
формулу
відносно![]() одержуємо:
одержуємо:
 (IV.2.16)
(IV.2.16)
Нехай
сторони мережі дорівнюють 1000 м, а похибка
вимірювання кута
![]() Тоді
Тоді
![]()
п= 16 трикутників.
Для
масштабу 1:2000 на плані 0,2 мм відповідає
0,4 м, тобто МР
= 0,4
м. Тому для такого масштабу, прийнявши
S
-
500
м,![]() отримаємо:
отримаємо:
![]()
«=10 трикутників.
Наші розрахунки зроблені для висячої ланки трикутників. Якщо ланка спирається на дві вихідні сторони, то максимальна похибка буде всередині
ланки і кількість трикутників такої ланки можна збільшити в раза.
Тоді отримаємо: для масштабу 1:5000 п = 22 трикутники;
для масштабу 1:2000 п = 14 трикутників.
Інструкція [5] допускає відповідно 20 та 17 трикутників.
Як бачимо, хоча наші розрахунки спрощені, похибки вихідних даних не враховані, але одержана кількість трикутників ланки майже така сама, що і допускається інструкцією.
IV.2.5. Спрощені способи зрівноваження аналітичних мереж
І. Висяча ланка ув'язує тільки кути трикутників. Поправки в окремий
кут![]() де
де![]() -
нев'язка трикутника. Далі розв'язуються
трикутники і
-
нев'язка трикутника. Далі розв'язуються
трикутники і
обчислюються дирекційні кути та довжини сторін. Координати кожної точки мережі обчислюються два рази, з контролем (за двома сторонами трикутника). За кінцеві значення координат беруть середні значення.
450
Розділ IV
II. Ланка між вихідними сторонами:
Ув'язуються всі кути.
Вибирається середня лінія, наприклад CD (рис. IV.2.3, г).
Координати точок С і D обчислюються два рази, як у висячої ланки. Знаходять середнє з них.
Надалі по кожному з чотирьох ходів між точками AD , ВС, NC, MD виконуються обчислення, як у теодолітних ходах.
III. Ланка трикутників між двома пунктами (побудована на вихідній стороні) (рис. IV.2.5):
Ув'язуються кути у трикутниках.
Вибирають ходову лінію (див. рис. IV.2.5), показану пунктирною ламаною лінією і ув'язують кути за ходовою лінією. Якщо, наприклад, кількість
кутів, враховуючи ті, що межують, дорівнює п, а нев язка /о , то поправки —
п
вводяться тільки в ходові кути. До того ж, у ліві кути поправки додаються, а від
правих віднімаються.
3. У трикутниках знову з'являються нев'язки. Для ліквідації нев'язок в
інші
(не ходові кути) вводяться поправки![]() .
Якщо кут [3] з отримав поправку
.
Якщо кут [3] з отримав поправку
![]() ,
тоді кожний із кутів Р[! та (3[ 2 повинен
одержати поправку, що дорівнює
,
тоді кожний із кутів Р[! та (3[ 2 повинен
одержати поправку, що дорівнює
![]()
4. За кінцево ув'язаними кутами обчислюють дирекційні кути ходових ліній та координати всіх точок, зокрема точки N . Отже, отримують координати X' та Y' точки N. Оскільки координати X' та Y' точки ./V не збігаються з відомими координатами точки N, то одержимо рис. IV.2.6.

451
Великомасштабне топографічне знімання

та
зміною
масштабу
на
![]()

Обчислюють: da = а - а' (поворот мережі). Поздовжній зсув t = S — S'.
Поперечний зсув и = S' —.
(IV.2.17) (IV.2.18) (IV.2.19)
(IV.2.20)
Коефіцієнт
k
=![]()
6. Ще раз обчислюють координати усіх точок за ходовою лінією за виправленими ос,- та St.
Якщо ланка побудована між вихідною стороною та відомим пунктом, то ув'язування мережі виконується, як і в попередньому випадку.
452
Розділ IV