

Init mode
foooi | 10
Site Description
r—
Bar
j<Hone> JNo
Save
Рис. 111.3.34. Вікно Point Attribute
Рис. 111.3.35. Вікно Init. Mode
Ініціалізація є дуже важливим кроком для успішного знімання в режимі "стій/йди". Далі поданий приклад, який ілюструє ініціалізацію з використанням рамки ініціалізації.
У вікні Point Attribute (Опис точки) виділяють пункт Initialize (Ініціалізація) і натискають ENTER для переходу у вікно Init. mode (Режим ініціалізації), рис. III.3.35.
Виділяють пункт Ваг (Панель) і натискають Save (Зберегти) для відображення вікна Point Attribute (рис. ІИ.3.36).
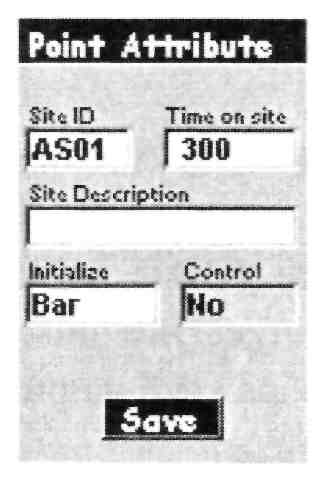
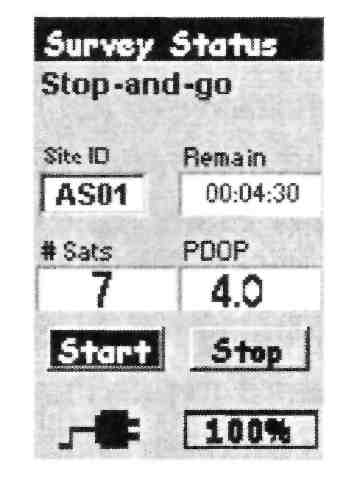
Рис. 111.3.37. Вікно Survey Status
Зверніть увагу на те, що значення параметра Time on Site (Час на пункті) встановлений за замовчуванням 300 с (5 хвилин).
6. У Survey Menu далі вибирають пункт Antenna. Тут установлюють висотні параметри антени. Якщо антена встановлена на віху, тоді її висота буде залишатися постійною. Постійними залишаються також Units (Одиниці вимірювань). За необхідності можна змінити Unit у Survey Menu.
Пункти 7, 8, 9, 10, 11 такі самі, як і під час статичного знімання. Після їхнього виконання налаштування обладнання закінчиться і тепер можна виконувати спостереження. Далі описується збирання даних, а також буде показано, як необхідно стежити за виконанням знімання.
400
 Просторові
супутникові
мережі
(основи
супутникової
геодезії)
Просторові
супутникові
мережі
(основи
супутникової
геодезії)
Пункт 12 такий самий, як і під час статичного знімання.
Пункт 13. У вікні Satellite Status (Статус супутника) натискають клавішу Nav/Surv (Навігація/Знімання), щоб відкрити вікно Survey Status (Статус знімання), рис. ІП.3.37.
Вікно Survey Status "стій/йди" інформує про збирання даних. У цьому вікні можна спостерігати за такими індикаторами якості спостережень:
Remain - поле Remain показує, як довго можна виконувати запис атрибутивної інформації про цей пункт. У полі Remain іде зворотний відлік часу, починаючи зі значення, яке встановлено в полі Time-on-site у меню Point Attribute;
# Sats (Кількість супутників), які розміщені на 10° вище від горизонту та інформація яких занесена в пам'ять;
• PDOP (Коефіцієнт геометричного погіршення точності вимірювання). Крім інформації про параметри знімання, вікно Survey Status "стій/йди"
так само, як і вікно Satellite Status (Статус супутника), показує стан джерела струму і кількість пам'яті, зайнятої даними.
14. Клавіша Start виділена і приймач готовий до реєстрації атрибутивної інформації про точку. Натискають клавішу Enter, щоб почати збирання атрибутивних даних. У полі Remain починається зворотний відлік часу. Коли значення в полі Remain досягне значення 00.00.00, виділиться клавіша Stop і збирання атрибутивних даних для цієї точки зупиниться, а ідентифікаційний номер пункту автоматично збільшиться на одиницю.
Увага:
Збирання атрибутивних даних на цій точці можна зупинити, натиснувши ENTER за виділеної клавіші Stop.
Реєстрація даних починається відразу після вибору пункту Collect Data (Збирання даних) і під час цього відстежуються чотири або більше доступних супутників, що розміщені на висоті більше ніж 10° над горизонтом. Дані реєструються протягом кожного інтервалу запису. Натискання на клавішу Start або Stop не приводить до переривання реєстрації даних, а тільки дає змогу додати атрибутивну інформацію про точку, на якій накопичуються дані.
Як тільки почалась робота в режимі "стій/йди", для нормальної роботи системи Pro Marc-2 повинна забезпечуватися пряма видимість супутникових сигналів під час усієї сесії спостережень. Якщо будь-який із приймачів, що входить у систему, не може підтримувати безперервний зв'язок не менше ніж з п'ятьма супутниками, пролунає попереджувальний сигнал кінематичного режиму. Це означає, що сигнал супутника загублений, тобто знімання потрібно ініціалізувати заново. Дані, зібрані до попереджувального сигналу, можуть бути
401
Розділ III
використані. Перед відновленням знімання необхідно наново виконати процедуру ініціалізації.
Закінчивши роботу, вимикають приймач. Далі всі дані завантажують у комп'ютер. Окрім роботи з приймачем, оператор безпосередньо на пункті закінчує усі записи в польовий журнал. У журналі повинна міститися така інформація:
назва пункту спостережень та його умовне позначення, занесене в реєстраційний файл;
прізвище оператора;
серійні номери антени, приймача;
висота встановлення антени над геодезичним пунктом;
час початку і закінчення спостережень на пункті;
номери супутників;
приблизні координати пункту;
усі зауваження, що стосуються виконання спостережень, які можуть виявитися корисними під час камерального опрацювання результатів вимірювання.
Якщо дані знімання будуть використані для складання топографічного плану, а точки, просторові координати яких визначались, є фактично пікетами знімання, то необхідно подати зариси певної групи пікетів зі стрілками пікетів, висоти яких можна інтерполювати для побудови горизонталей так, як це робиться під час тахеометричного знімання.
III.3.9. Загальні відомості про опрацювання GPS-вимірів
В опрацюванні топографо-геодезичної інформації, зібраної GPS-прий-мачами, розрізняють:
попереднє опрацювання;
кінцеве опрацювання.
Часто в попередньому опрацюванні виділяють так зване первинне опрацювання.
До первинного опрацювання належать обчислення, що виконуються безпосередньо під час вимірювання. Цей етап дає змогу контролювати дані в польових контролерах (приймачах). При цьому контролюються:
наявність видимості неба (відсутність перешкод);
наявність необхідної кількості супутників;
допустимість геометричного фактора;
визначення координат у навігаційному режимі.
402
 Просторові
супутникові
мережі
(основи
супутникової
геодезії!)
Просторові
супутникові
мережі
(основи
супутникової
геодезії!)
Попереднє опрацювання виконується з використанням стандартного програмного забезпечення фірми-виробника супутникових приймачів.
Більшість сучасних програм камерального опрацювання вимірів (посто-працювання) поділяються за методами опрацювання на:
обчислення окремих ліній;
багатоточкові розв'язки.
Метод обчислення окремих ліній є найпоширенішим, і його у будь-якому разі доцільно застосовувати під час виконання попереднього опрацювання, навіть коли програмний пакет дає змогу реалізувати багатоточкові розв'язки. Річ у тім, що на цій стадії опрацювання зазвичай впливає значна кількість грубих похибок, а методом багатоточкового розв'язання їх виключити складно.
Програмне забезпечення, розраховане на опрацювання окремих ліній, забезпечує кращий контроль і локалізацію неякісно виміряних ліній.
Як правило, точність таких ліній істотно гірша, ніж середня точність на цьому об'єкті робіт. Іншим методом контролю є контроль за замкнутими побудовами: трикутниками, векторними ходами між відомими точками. Якщо сума приростів координат по цьому векторному ходу відповідає паспортній точності приладу, то лінії, що увійшли в цю побудову, виміряні якісно.
Загальний алгоритм обчислення методом окремих ліній подано на рис. ІП.3.38.
Перед обробкою результати супутникових спостережень переписують на комп'ютер. Переписування даних спостережень із приймача на комп'ютер виконується за допомогою відповідного кабелю, який з'єднує комп'ютер із приймачем, або карт пам'яті, які зчитуються комп'ютером. Формат даних спостережень різних форм та різними супутниками істотно відрізняється. Зроблена спроба стандартизації результатів вимірювання, яка привела до появи формату RINEX (Receiver Independent Exchange) - уніфікованого текстового запису результатів спостережень, який зчитує будь-яке програмне забезпечення усіх фірм-виробників супутникових приймачів. Формат RINEX складається з трьох файлів:
файл віддалемірних даних;
файл метеорологічних даних;
файл навігаційних повідомлень.
Метою кінцевого опрацювання є отримання готової продукції каталогів координат. Це означає, що під час кінцевих обчислень виконуються:
зрівноваження мереж;
обчислення координат у національній системі координат (еліпсоїд Красовського);
403
Розділ III

визначення координат у Європейській системі координат;
виконання супутникових координатних обчислень під час виконання різноманітних завдань, наприклад, геодинамічних, які пов'язані з переходом від "статичноГ' геодезії до "динамічної"" геодезії;
застосування супутникових технологій у прикладній геодезії;
виконання аерознімання з використанням супутникових технологій, що приводять до виключення прив'язування аерознімків;
застосування супутникових технологій у морській геодезії;
використання супутникових технологій під час різного спеціалізованого знімання.
НІ.4. Основні джерела похибок супутникових вимірювань і методи послаблення їхнього впливу
III.4.1. Класифікація джерел похибок супутникових вимірювань
Під час опрацювання супутникових вимірів виникає необхідність ретельного дослідження впливів усіх можливих джерел похибок, особливостей їхнього виникнення й обґрунтування методів їхнього обліку. Залежно від характеру впливу зазначених джерел виниклі похибки поділяються на дві основні групи:
404
Просторові супутникові мережі (основи супутникової геодезії)
систематичні похибки, які стосовно супутникових вимірів отримали назву зсувів;
похибки випадкового характеру, які часто порівнюють із поняттям "шум".
Для похибок першої групи створюються спеціальні методи їхнього обліку. Вплив другої групи вдається, здебільшого, мінімізувати за рахунок використання великого масиву вимірів. У цьому підрозділі основна увага приділена похибкам систематичного характеру, які викликають зсуви результатів вимірювання.
На підставі аналізу вимірювального процесу, характерного для системи GPS, усі джерела систематичних похибок можна ще умовно поділити на три групи:
похибки, пов'язані з неточними вихідними даними, з яких основними є похибки ефемерид;
похибки, викликані впливом зовнішнього середовища;
інструментальні джерела похибок, до яких, як правило, зараховують невідоме положення фазового центра антени приймача, невраховані тимчасові паузи під час проходження інформаційних сигналів через апаратуру, а також похибки, пов'язані з роботою пристроїв.
Поряд із вищеназваними групами похибок необхідно враховувати й окремі фактори, які викликають виникнення похибок, що не характерні для жодної з перерахованих вище груп. Зокрема, до таких похибок можуть бути зараховані похибки, що виникають внаслідок неоптимального взаємного розташування супутників (геометричний фактор). Крім того, цілий ряд похибок може виникати під час переходу від однієї координатної системи до іншої (наприклад, від притаманної системі GPS глобальної координатної системи WGS-84 до місцевої координатної системи). Також необхідно враховувати вплив джерел похибок, пов'язаних з "штучним зашумленням" випромінюваних супутниками радіосигналів.
111.4.2. Джерела похибок, пов'язані з неточними ефемеридами супутників та методи послаблення їхнього впливу
Під час визначення координат точок на земній поверхні супутниковими методами необхідно, поряд із вимірюванням відстаней до супутника, знати також його ефемериди, тобто місцезнаходження супутника на момент виконання вимірювання. Неточна інформація про ефемериди пов'язана, насамперед, із розбіжностями, які спостерігаються на практиці, між прогнозованою (незбуреною) і реальною (підданою впливу сил, що збурюють) орбітами. До
405
Розділ III
сил, що збурюють, належать різні фактори як гравітаційного, так і неграві-таційного походження (табл. Іїї.4.1).
Перші з них, викликані притяганням супутника до Землі, Місяця й Сонця, піддаються доволі ефективному моделюванню. Одночасно такі збурювальні фактори негравітаційного походження, як, наприклад, сонячний радіаційний тиск, погано піддаються моделюванню через непередбачуваність окремих компонентів, від яких залежить результуючий вплив на супутник.
Виконані дослідження з кількісного оцінювання впливу окремих факторів на ефемериди супутника свідчать про те, що найбільший вплив на відхилення реальної орбіти від розрахункової чинить гравітаційне поле Землі. Зокрема, такі відхилення для тригодинних дуг орбіт досягають 2 км, а для триваліших дводобових дуг - до 14 км. З такими значними відхиленнями не можна не рахуватись під час супутникового вимірювання будь-якого виду.
Таблиця III. 4.1