

111.3.5. Підготування комплексу приладів до польового вимірювання
Перед виїздом на польові роботи керівник робіт проводить інструктаж з усіма керівниками бригад і видає кожній бригаді робочий проект або відповідні витяги з нього.
381
 Розділ
III
Розділ
III
Кожна бригада укомплектовується приладами, необхідними для виконання польових робіт, обладнанням та матеріалами.
Подамо детальний список усього необхідного обладнання:
автомобіль (бажано підвищеної прохідності);
приймач із комплектом допоміжного обладнання;
додатковий запам'ятовувальний пристрій;
2 комплекти кабелів;
2 акумулятори (із комплекту приймача або автомобільні);
зарядний пристрій для акумуляторів;
переговорний пристрій з 2 акумуляторами (один запасний із зарядним пристроєм до нього);
штатив;
оптичний центрир;
комплекс метеорологічних приладів (еталонований психрометр із "сухим" та "мокрим" термометрами), а також барометр-анероїд;
оптичний теодоліт (ЗО") для знімання елементів приведення під час встановлення антени приймача поза центром;
нівелір із рівнем або компенсатором;
складна шашкова рейка з рівнем;
ліхтарики;
бусоль;
рулетка 20 м;
інструменти для дрібного ремонту та юстування приладів;
комплект карт масштабу 1:50000—1:25000 на район вимірювання;
робочий проект мережі (або витяг з нього) зі схемами та списком пунктів, на яких будуть виконуватися спостереження та прив'язування, графіки виконання вимірювання та зазначатися інформація про доїзди до них;
картка рекогностування, обстеження, оновлення та побудови геодезичних пунктів (реперів);
журнали супутникових спостережень;
лист графічного та аналітичного визначення елементів центрування антени супутникового приймача;
медична аптечка для надання першої допомоги.
Перед початком польового сезону супутникові приймачі повинні пройти еталонування на взірцевих базисах або метрологічних полігонах. Повторно еталонування виконується після кожного сильного струсу або ремонту антен і радіочастотних блоків приймача. Під час транспортування та перенесення
382
Просторові супутникові мережі (основи супутникової геодезш)
 приймач
потрібно оберігати від ударів та
пошкодження. Запам'ятовуввальні
пристрої,
які входять до комплекту приймача,
необхідно зберігати в сухому місці та
оберігати від температурних впливів,
ударів, згинів, стежити, щоб поверхня
роз'ємів була чистою і незапиленою.
приймач
потрібно оберігати від ударів та
пошкодження. Запам'ятовуввальні
пристрої,
які входять до комплекту приймача,
необхідно зберігати в сухому місці та
оберігати від температурних впливів,
ударів, згинів, стежити, щоб поверхня
роз'ємів була чистою і незапиленою.
111.3.6. Будова та технічні характеристики компактного одночастотного приймача GPS ProMark-2
У цьому параграфі та у двох наступних буде детально розглянуто питання будови та можливостей застосування компактного приймача РгоМагк-2 фірми Ashtech (США) для побудови геодезичних мереж та топографічного знімання. Деталізація цього питання можлива тільки під час вивчення конкретного приймача, хоча всі приймачі GPS мають багато спільних загальних систем, вузлів та деталей. РгоМагк-2 - повнофункціональна GPS система, що розв'язує задачі точного геодезичного вимірювання та навігації. Комплект системи РгоМагк-2 складається із двох або більше приймачів з антенами та допоміжними компонентами.
Приймач, завдяки своїй компактності, менший за вартістю порівняно з іншими приймачами, а також доволі високий за точністю вимірювання, широко застосовується у геодезичному виробництві. Крім фірми Ashtech, аналогічний приймач виготовляє фірма Magellan Corporation, названий ProMark X-CM, a фірма Ashtech почала випускати модифікований приймач РгоМагк-3. Приймач РгоМагк-2 отримує та зберігає неопрацьовані дані з GPS-супутників про кожну точку знімання. Дані із приймача пізніше піддаються пост-опрацюванню з метою визначення положення точок знімання. Зовнішній вигляд приймача показано на рис. Ш.3.9.
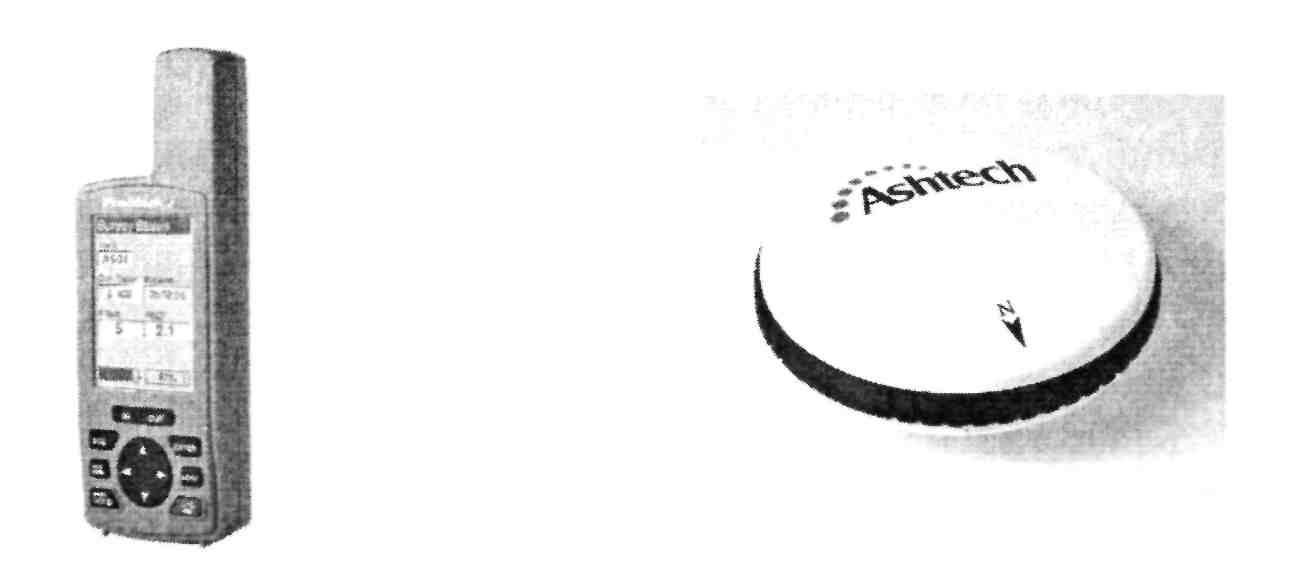
Рис. II1.3.9. GPS-приймач ProMark-2 Рис. ІII. 3.10. Зовнішня GPS-антена
383
 Розділ
III
Розділ
III
Якщо для навігації достатньо вмонтованої у приймач антени, то для отримання даних точного геодезичного знімання необхідна зовнішня антена (рис. Іїї.3.10)
Зовнішня антена має точку, у якій фізично збираються дані з GPS-супутників про положення (просторові координати) саме цієї точки. Тому ця точка антени повинна прямовисною лінією проектуватися на центр геодезичного знака або точки місцевості, положення якої визначається. Антена центрується за допомогою оптичного центрира та стандартного штатива або GPS-штатива.
Зовнішній антенний кабель (рис. ІП.3.11) під'єднується до РгоМагк-2 через задню частину польового утримувача приймача. Маленький роз'єм під'єднується до приймача, великий роз'єм - до антени.
Вертикальний подовжувач антени (рис. ІП.3.12) забезпечує можливість під'єднання антени, коли вона встановлена на штатив. Його довжина 76,2 мм.
До комплекту приймача входить вимірювальна рулетка для вимірювання висоти антени над центром знака (рис. ІП.3.13).

Рис. 111.3.11. Зовнішній Рис. ІП.3.12. Вертикальний Рис. III.3.13. Вимірювальна
антенний кабель подовжувач антени рулетка
Початок рулетки фіксується у виїмці, розташованій збоку на корпусі антени. Витягується рулетка вниз у напрямку до центра знака так, щоб загострений штир, розташований на корпусі рулетки, торкнувся знака. У цю мить береться відлік шкали рулетки. Відлік дає не вертикальну, а похилу висоту антени над центром знака. Ця висота може бути приведена до вертикальної висоти. Достатньо знати радіус антени.
Офісний утримувач приймача з кабелем завантаження. Цей тримач дає змогу під'єднати приймач РгоМагк-2 до офісного комп'ютера з метою завантаження в комп'ютер даних GPS-знімання. Як тільки приймач установлюється на тримач, кабель завантаження автоматично під'єднується до приймача через контакти, що розміщені на задній частині приймача. Офісний утримувач із кабелем показано на рис. Ш.3.14.
384
Просторові супутникові мережі (основи супутникової геодезш)


Рис. ІІІ.3.14. Офісний утримувач приймача Рис. ІІІ.3.15. Компакт-диск з програмою з кабелем завантаження Ashtech Solutions та інструкція
користувача

До комплекту приладу входить програма постопрацювання (Ashtech Solutions) (рис. ІП.3.15).
Програма має модулі, які забезпечують завантаження та опрацювання супутникових даних із кожного приймача РгоМагк-2. Програмне забезпечення записане на компакт-диск. Ashech Solutions User's Guide - інструкція з використання офісного програмного забезпечення з метою планування завантаження і постопрацювання даних.
385
Розділ III
До комплекту приймача ще входить польова сумка для транспортування приладу, а також компакт-диск (Map Send Streets). Компакт-диск має тільки карти на територію США. Диск не входить до комплекту системи приймача, який продається за кордоном США.
Крім того, під час роботи з приймачем необхідно додаткові предмети, які не входять до стандартного комплекту. Серед таких предметів є штатив, підставка (трегер-носій) та адаптер антени. На рис. ІП.3.16, б показано ці три предмети окремо та в зібраному вигляді разом з антеною та штативом (рис. ПІ.3.16,а).
У трегер антени вмонтовано оптичний центрир та підіймальні гвинти для приведення антени в робочий стан.
Під час роботи у псевдокінематичному та кінематичному режимах для кріплення РгоМагк-2 може бути використана віха, показана на рис. ІП.3.17.
![]()

На рис. Іїї.3.9 показаний загальний вигляд приймача.
На рис. ПІ.3.18 показана панель керування приймачем - керівні клавіші.
У таблиці III.3.2 описано функції кожної клавіші.
На рис. III.3.19 показано три вікна, які дають змогу виконувати редагування, описування (ідентифікацію) пунктів, вводити або змінювати деякі параметри Site ID, Site description i Receiver ID.
Подамо далі деякі дані про термін роботи джерел електроенергії. Живлення приймача Pro Mark-2 здійснюється за допомогою двох стандартних батарей типу АА. Також можна використовувати будь-які батареї цього типу як одноразові (лужні, літієві), так і перезарядні (нікель-кадмієві, нікель-метал-гідридні, лужні). Найдовше працюють літієві батареї, потім лужні. Термін
386
 Просторові
супутникові
мережі
(основи
супутникової
геодезії)
Просторові
супутникові
мережі
(основи
супутникової
геодезії)
роботи батарей значною мірою залежить від температури повітря. Так, якщо температура повітря -10 °С, термін дії батарей - 2,5 години. Для +10 °С ~ 6 годин, для +20 °С - 9 годин. Менше залежать від температури літієві батареї (для -10 °С - 10 годин; для +10 °С - 12 годин). Приймач під час роботи показує стан батарей. Перший такий сигнал - Low Battery (Низький рівень зарядки ALARM). Час праці після такого сигналу для кімнатної температури дорівнює приблизно 1 годині, а для 10 °С - 10 хвилин.
Таблиця III. 3.2
Клавіші, що використовуються під час роботи з приймачем
Клавіші |
Опис дії |
ENTER, Введення |
Використовується під час виконання вибраної функції, редагування вибраних параметрів або введення вибраних значень, які наведені у вікні survey menu (меню в режимі "знімання"). Наприклад: серед них функція "Point Attribute" вибирається за допомогою стрілок "вверх" і "вниз". Для виконання цієї функції потрібно натиснути клавішу ENTER і т. д. |
MENU, Меню |
Призначена для доступу до пункту Servey Menu в будь-який момент, навіть під час збирання даних (тобто під час спостережень) |
IN |
Ввійти у вибраний пункт меню |
OUT |
Вийти із вибраного пункту меню |
Червона кнопка on/off ув/вимкн |
Якщо клавішу швидко натиснути і відпустити, вмикається або вимикається приймач. Якщо утримувати клавішу 2 секунди, коли приймач уже ввімкнений, тоді дисплей підсвітиться. Якщо її знову утримувати 2 с, підсвічення вимкнеться |
Mark/GOTO |
Дає змогу отримати доступ до пункту Point Attribute (дані про пункт спостережень) у будь-який момент збирання даних |
ESC |
Використовується для закриття поточного і повернення до попереднього пункту меню. Відредаговані, попередньо не збережені параметри, закриті за допомогою цієї клавіші, не збережуться |
Овальна кнопка із чотирма стрілками |
Дає змогу виділити функцію, яку ви хочете виконати, або виділити величини, які потрібно ввести. Пункт "Mode" дає змогу працювати в режимах Survey або Navigate. Стрілки "вверх" та "вниз" призначені для перемикання між режимами Survey і Navigate |
Останній сигнал Exterme Low Pover. Після такого сигналу робочий файл закривається, а приймач вимикається через 10 с. Потрібна заміна батарей.
На рис. Ш.3.20 показана заміна батарей. Необхідно відгвинтити гвинт, зняти кришку відділення для батарей. Замінити старі батареї на нові, ураховуючи полярність. Закрити кришку та загвинтити гвинт.
387
Розділ
III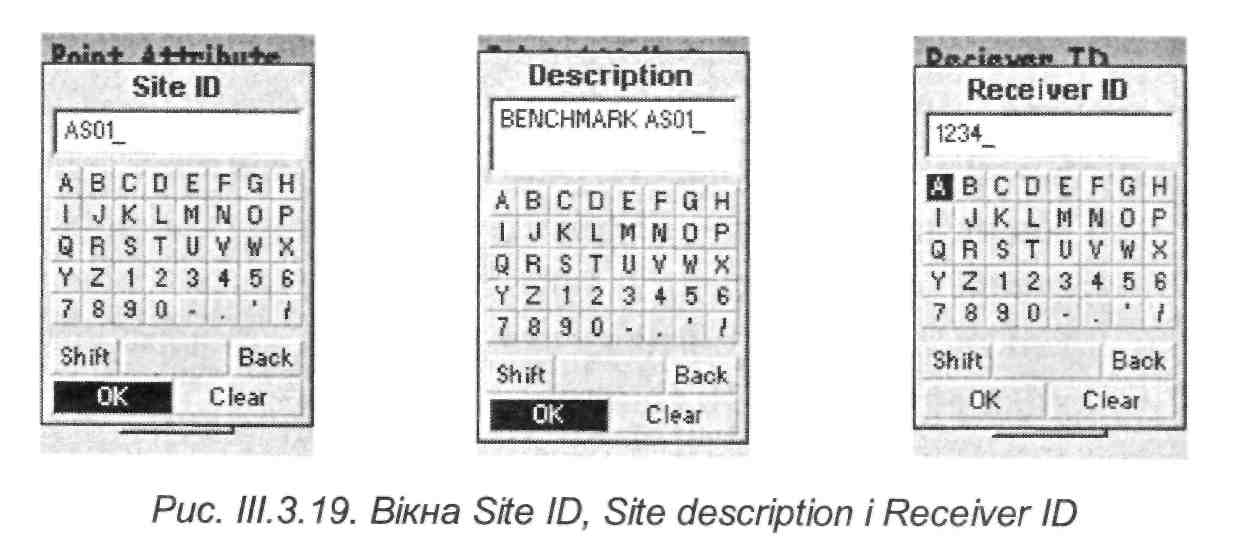

Об'єм пам'яті приймача Pro Mark-2 для зберігання даних - 8 МБ. Мінімальний час спостереження 7 годин за умови, що збирання даних виконується в найгірших умовах, коли 10 супутників відстежуються з 1-секундним інтервалом. За 10-секундного інтервалу можна зберегти дані 72-годинного інтервалу спостережень.
Тому рекомендується:
Щоденно переписувати зібрані дані із приймача до комп'ютера.
Переписувати дані із приймача після опрацювання.
Оскільки території України немає у картах Map Send Streets, то файли, відведені під ці карти, можуть бути зайняті файлами, що стосуються безпосередньо знімання.
На закінчення цього параграфа подамо технічні параметри та фізичні специфікації системи Pro Mark-2.
388
 Просторові
супутникові
мережі
(основи
супутникової
геодезії)
Просторові
супутникові
мережі
(основи
супутникової
геодезії)
Таблиця III. 3.3
Технічні параметри та фізичні специфікації

III.3.7. Підготування приймача Pro Mark-2 до роботи та виконання спостережень на геодезичному пункті
Для підготування приймача Pro Mark-2 до роботи необхідно:
З'єднати штатив та трегер.
Зцентрувати штатив із трегером над точкою за допомогою оптичного центрира. Це виконується так само, як і в електронного тахеометра.
389
Розділ III

Рис. III. 3.21. Закріплення приймача на штативі

З'єднати антену з вертикальним подовжувачем; нижній кінець подовжувана з'єднати з адаптером і його підставкою.
З'єднати зібрану GPS-антену із трегером, закріпленим на штативі. Після цього перевірити центрування антени над точкою.
Помістити приймач Pro Mark-2 у польовий утримувач.
Приймач разом з утримувачем закріпити на штативі на такій висоті, щоб було зручно працювати, як це показано на рис. ПІ.3.21.
Прикріпити на антену кабельний з'єднувач. Прикріпити другий кінець кабелю до задньої частини приймача. Це робиться простим засуванням з'єднувача в названу частину приймача.
Виміряти та записати висоту приймача та висоту GPS-антени за допомогою рулетки. Бажано записати висоту як у метрах, так і у футах. Це зменшить імовірність появи похибки вимірювання висоти.
390
 Просторові
супутникові
мережі
(основи
супутникової
геодезії)
Просторові
супутникові
мережі
(основи
супутникової
геодезії)
Як тільки приймач установлено над точкою, можна починати підготування приймача до спостережень, яке складається з таких кроків:
Ввімкнення приймача за допомогою червоної клавіші on/off на лицевій частині приймача. З'явиться вікно Mode (Режими).
Вибір пункту Survey (Знімання) за допомогою виділення Survey та натискання ENTER для входу до екрана Survey (рис. III.3.22).
Екранне меню Survey забезпечує можливість налаштувати приймач і функції параметрів знімання до початку збирання даних (навіть до виїзду в поле, тобто в камеральних, офісних умовах). Під час вибору на екрані Survey пункту меню Setup (Налаштування) відкриється вікно Survey Menu, де можна встановлювати параметри знімання. У разі вибору пункту Collect Data (збирання даних) починається знімання.
Допустимо, приймач не підготований до знімання ще до виїзду в поле. Тоді у пунктах 3-11 розглядаються функції приймача і налаштування знімання безпосередньо перед початком спостережень.
Немає необхідності заново виконувати усі налаштування кожен раз перед виконанням знімання, оскільки деякі з них, наприклад, такі, як вибір одиниць вимірювання (Unit of Measure) та ідентифікаційний номер приймача (Receiver ID), будуть однаковими для всіх геодезичних пунктів. Усі пункти налаштування (3-11) необхідно виконувати так:
3. Вибрати з екранного меню Survey (Знімання) (рис. ІП.3.22) пункт Setup (Налаштування), натиснути ENTER (Введення) для відкриття Survey Menu (Меню у режимі Знімання) (рис. ІП.3.23).
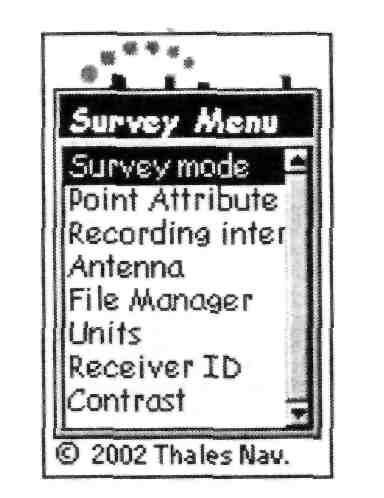
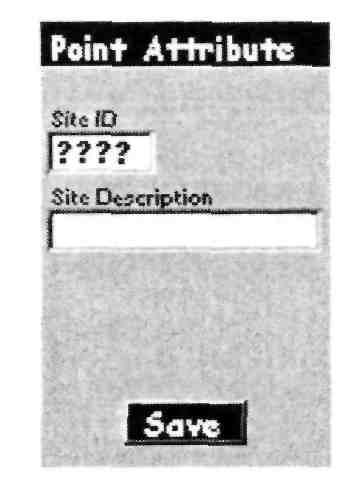
Рис. 111.3.24. Вікно Point Attribute
 Саме
Survey
Menu
забезпечує доступ до функцій приймача
і налаштування
параметрів знімання. Усі ці параметри
можна прочитати на екрані Survey
Menu.
Саме
Survey
Menu
забезпечує доступ до функцій приймача
і налаштування
параметрів знімання. Усі ці параметри
можна прочитати на екрані Survey
Menu.
391
Розділ III
Першим пунктом екрана є Survey Mode (Режим знімання). Необхідно вибрати у Survey Menu пункт Survey Mode (Режим знімання). Далі встановити режим Static (Статичний).
У Survey Menu потрібно вибрати Point Attribute (Опис точки). Якщо вибрано пункт меню Point Attribute натиснути ENTER для переходу у вікно Point Attribute (рис. ІП.3.24). Це вікно дає змогу вводити атрибутивну інформацію про точку спостережень, на якій установлено приймач.
Інформація містить:
чотиризначний ідентифікатор пункту. Потрібно присвоїти ідентифікаційний номер кожній точці, що визначається. Номер повинен залишатися однаковим під час багаторазових спостережень на одній точці;
довільний 20-значний опис кожної точки.
Щоб ввести атрибутивну інформацію про точку, необхідно виділити поле Point Attribute, натиснути клавішу ENTER. Далі поміняти значення на необхідні. У кінці вибрати (натиснути) Save (Зберегти), щоб повернутися в меню Survey Menu.
У меню Survey Menu вибрати пункт Antenna (Антена). Установити висотні параметри антени для точки. Вибрати Slant (Нахилена висота), якщо потрібно виміряти висоту GPS-антени від центра до точки, що розташована на боковому краю корпусу антени, або Vertical (Прямовисна висота), якщо потрібно виміряти висоту антени по вертикалі від її нижньої частини до центра знака. Ввести виміряні значення висоти антени. Вибрати одиниці вимірювання висоти антени, натиснувши пункт Units (Одиниці) у Survey Menu.
У Survey Menu потрібно вибрати пункт File Menager (Файловий менеджер). Тут можна звільнитися від старих файлів даних, якщо необхідна додаткова пам'ять для закінчення сеансу (сесії) знімання. Виділивши пункт File Menager, натиснути ENTER для відкриття вікна File Menager, рис. III.3.25.


Рис. ІII. 3.26. Вікно Unit of Measure
392

 Просторові
супутникові
мережі
(основи
супутникової
геодезії)
Просторові
супутникові
мережі
(основи
супутникової
геодезії)
Вікно File Menager дає змогу видалити непотрібні файли даних і тим самим звільнити пам'ять для збирання даних у поточному сеансі спостережень. У вікні подано список файлів, що займають пам'ять і клавіші, що відповідають командам, які виконують їхнє виведення. Кожний файл має символ, що характеризує його так:
> - файл є поточним файлом, у який заносяться дані;
+ - файл ще не був вивантажений із приймача;
- - файл був вивантажений із приймача.
Для вибору файла, який необхідно видалити, використовують стрілки "вверх/вниз". Для вибору Delete (Видалити) або Del.AH (Видалити все) використовують праву і ліву стрілки. Під час вибору пункту Delete буде видалений тільки вибраний файл. Якщо вибрати пункт Del.AH, видаляться всі файли.
Натисніть клавішу ESC (Відміна) для закінчення роботи із цим вікном і повернення у попереднє меню Survey Menu.
8. У Survey Menu потрібно вибрати пункт Units (Одиниці). Пункт приз начений для зміни одиниць вимірювань, якщо встановлений варіант не задовольняє.
Виділивши пункт Units, потрібно натиснути ENTER, щоб відкрити вікно Unit of Measure (Одиниці вимірювань), рис. III.3.26.
Вікно Unit of Measure дає змогу вибрати одиниці, у яких вводиться інформація щодо висоти антени. Крім того, вибрані одиниці використовуються таймером спостережень.
Для доступу до вибраного списку одиниць натиснути ENTER. Тут вибирають потрібний варіант і знову натискають ENTER. Далі вибирають Save (Зберегти) для повернення в Survey Menu.
9. У Survey Menu потрібно вибрати Receiver ID (Ідентифікатор прий мача). Тут змінюється ідентифікаційний номер приймача, якщо не задовольняє поточний номер.
Виділивши пункт Receiver ID, натискають ENTER (Введення) для відкриття вікна Receiver ID (Ідентифікатор приймача), рис. ПІ.3.27.
Вікно Receiver ID (Ідентифікатор приймача) уможливлює введення горизонтального ідентифікатора (ID) приймача, який використовується під час формування назви файла необроблених даних. Кожний такий файл, записаний у цьому приймачі, буде мати чотиризначний ідентифікаційний номер. Цей номер приймача повинен бути унікальним (єдиним). В іншому разі виникнуть проблеми під час постопрацювання зібраних даних. Для редагування ідентифікатора приймача натискають ENTER. Можна змінити наявні значення ID на
393
Розділ III
бажані. Після введення ID потрібно вибрати Save (Зберегти) для збереження та повернення в Survey Menu.
10. У Survey Menu вибирають пункт Contrast (Контраст). Якщо погано відображається текст на дисплеї, то можна змінити контрастність дисплея.
Виділивши Contrast, натискають ENTER, щоб відкрити вікно Contrast (рис. ПІ.3.28).
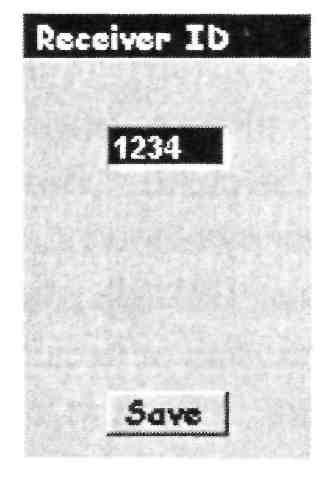
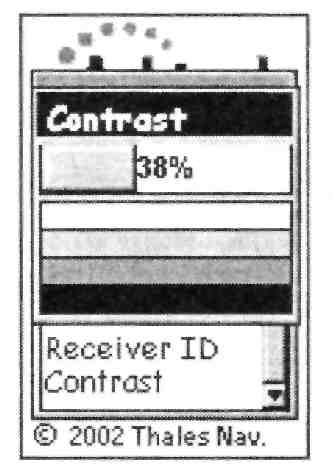
Рис. 111.3.28. Вікно Contrast
Для зміни контрастності дисплея приймача використовують праву і ліву стрілки для налаштування контрастності. Виконавши цю операцію, натискають клавішу ENTER для повернення в Survey Menu.
11. Щоб вийти з Survey Menu і повернутися до вікна Survey ("Знімання"), натискають клавішу ESC (див. рис. III.3.22).
Отже, на цьому закінчилося налаштування приладу для спостережень. Далі описується збирання даних. Для цього:
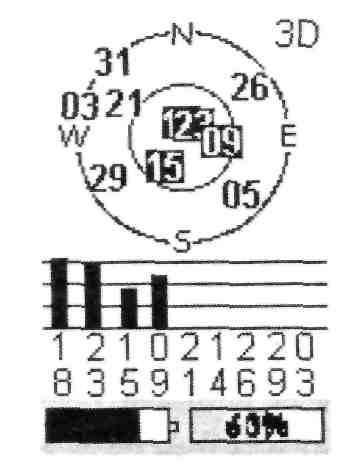
12. У вікні Survey вибирають пункт Collect Data (збирання даних), натискають ENTER для відкриття вікна Satellite Status (Статус супутника), рис. ІП.3.29.
Вікно Satellite Status (Статус супутника) показує супутники, які відстежує приймач. На схематичному зображенні небесної сфери відображені номери супутників, які доступні для спостереження на цей час. Якщо сигнал супутника захоплений GPS-приймачем, зображення номера цього супутника інвертовано (чорне віконце з білим номером). Шкала під зображенням небесної сфери показує потужність сигналу супутника. Під час приймання сигналів від чотирьох супутників, що розміщені вище від 10° над горизонтом, автоматично починається збирання даних. Автоматично буде викликано вікно Survey Status. Можна повернутися у вікно Satellite Status, натиснувши клавішу Nav/Surv (Навігація/Знімання).
У нижній частині вікна Satellite Status є два індикатори: стану джерела струму (ліворуч) та кількості вільної пам'яті (праворуч). Індикатор вільної
394
Просторові супутникові мережі (основи супутникової геодезії)
пам'яті показує в графічному вигляді вільну пам'ять, що залишилася для зберігання даних. Як тільки починається зберігання даних, процентне число починає миготіти, що означає: збирання даних почалося. Індикатор стану джерела струму графічно показує заряд батареї, що залишився. Якщо зовнішнє джерело струму під'єднане до приймача, то на дисплеї з'явиться віконце зі значком вилки електричного з'єднання.
Для оцінки впливу перешкод на пункті знімання використовують схему небесної сфери для візуалізації тих супутників, які будуть блоковані перешкодами. Це допоможе визначити, чи цей пункт сприятливий для GPS-спостережень.
13. Далі, щоб відкрити вікно Survey Status, у вікні Satellite Status натискають клавішу Nav/Surv (рис. ІП.3.30).
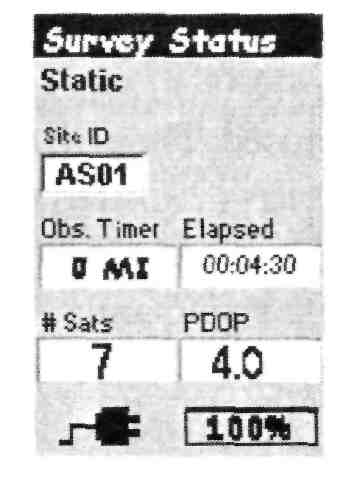
Це вікно інформує про хід збирання даних. Ця інформація допомагає визначити, чи достатня кількість даних зібрана для якісного майбутнього постопрацювання. У цьому вікні можна спостерігати за такими індикаторами якості спостережень:
• Observation Timer (таймер спостереження). Поле Observation Timer інформує про поточний стан таймера спостережень.
Таймер перевіряє, чи достатньо одержаних супутникових даних для того, щоб після їхнього опрацювання отримати якісні дані. Для цього таймер враховує кількість супутників, що захоплені, геометрію супутників (PDOP), а також перерви у спостереженнях, викликані наявністю перешкод. Таймер повідомляє, коли буде зібрано достатньо даних для того, щоб забезпечити бажану точність визначення вектора, що з'єднує два пункти, у яких одночасно виконуються спостереження. Проміжок часу, необхідний для цього, залежить від віддалі між пунктами спостережень. Можливі такі граничні значення:
0 км - відображається у разі, коли зібраних даних недостатньо для точного визначення вектора;
395
Розділ III
5 km - відображається в тому разі, коли зібрано достатньо даних, якщо довжина вектора не більша за 5 км;
10 км - коли довжина вектора не більша за 10 км;
15 км - коли довжина вектора не більша за 15 км;
20 км - коли довжина вектора не більша за 20 км.
Тому, по-перше, необхідно наближено розрахувати довжини векторів, які необхідно буде визначити під час знімання, а, по-друге, використовуючи як орієнтир найдовшу з цих віддалей, зачекати, поки таймер не покаже значення, що відповідає цій віддалі. Коли це відбудеться, спостереження на пункті можна вважати закінченими.
Примітка: наявність перешкод може викликати неточність у роботі таймера. Тому, коли спостереження виконуються у закритій перешкодами місцевості, необхідно зібрати дещо більше даних на цьому пункті, щоб гарантувати якісний результат.
Elapsed Time (Витрачений час). Поле Elapsed Time показує, скільки часу пройшло з моменту початку збереження даних у поточному спостереженні. З досвідом спостережень можна оцінювати, який проміжок часу необхідний для збирання даних для різних умов.
# Sate (Кількість супутників). Поле # Sate показує поточну кількість супутників, які розташовані вище за 10° над горизонтом, інформація про які занесена в пам'ять. Якщо для спостережень доступна незначна кількість супутників, то потрібна більша кількість даних, щоб успішно виконати спостереження. Цей параметр може бути використаний на пункті спостережень як індикатор впливу перешкод на збирання даних у будь-який час знімання.
PDOP (Коефіцієнт геометричного погіршення точності вимірювання). Поле PDOP відображає значення цього коефіцієнта у будь-який час. Це значення обчислює приймач, аналізуючи взаємне розташування усіх доступних для спостережень супутників, які розташовані вище за 10° над горизонтом. Якщо значення PDOP велике, то потрібно зібрати більше даних для успішного закінчення спостережень. Тому цей параметр також може бути використаний, як і параметр # Sate. Крім інформації про параметри знімання вікно Survey Status, так само, як і вікно Satellite Status, відображає стан джерела струму і кількість пам'яті, зайнятої даними.
Отже, під час виконання спостережень оператор повинен стежити саме за цими двома вікнами, щоб бути інформованим про хід збирання даних.
14. Якщо необхідно змінити якісь дані про параметри знімання або приймач, потрібно натиснути клавішу Menu (Меню) для доступу до Survey Menu.
396
Просторові супутникові мережі (основи супутникової геодезїіі)
Важливо пам'ятати, що Survey Menu (Меню в режимі "Знімання") доступне в будь-який час під час збирання даних натисненням клавіші "Menu" (Меню). Це те саме меню, яке описане раніше. Усі налаштування Survey Menu (Меню у режимі "Знімання") можуть бути встановлені в будь-який момент під час виконання спостережень. Інакше кажучи, дії 3-10, подані вище, можуть, за бажанням, бути виконані одразу після початку збирання даних. Це дає змогу розпочати збирання даних ще до введення налаштувань, що скоротить час перебування на точці спостережень.
Треба врахувати, що коли ідентифікатор приймача змінюється під час збирання даних, ім'я поточного файла активних даних буде містити ID приймача, установлений на початку збирання даних.
15. Якщо зібраних даних достатньо для виконання постопрацювання, приймач вимикають.
Як бачимо, виконання спостережень на пункті у статичному режимі складається з 15 підпроцесів (дій).
Примітка: для уникнення можливих пошкоджень необхідно від'єднати кабель зовнішньої антени від приймача до того, як виймати приймач із рами польового утримувача.
Необхідно дотримуватися вищеподаної послідовності дій у кожному сеансі (сесії) статичних спостережень.
За наявності каналу зв'язку оператор повідомляє на центральний пункт, що він готовий закінчити спостереження або внести пропозицію про необхідність продовження спостережень.
111.3.8. Застосування режиму "стій/йди" для визначення просторових координат під час топографічного знімання місцевості
На ділянці, що підлягає топографічному зніманню, залежно від розміру ділянки, вибирають одну або декілька базових станцій, які, зазвичай, є пунктами ДГМ.
Вибираючи розташування базових станцій, необхідно розмістити їх на точках з якомога меншою кількістю перешкод (дерева, будинки, зовнішні геодезичні знаки), що затримують поширення супутникових сигналів до приймача, який не зможе від стежити мінімум п'ять супутників під час збирання кінематичних даних рухомими (роверними) приймачами. У результаті можлива втрата деяких точок, що спостерігаються в цей проміжок часу роверними приймачами. Чим відкритіша місцевість, тим успішніше пройде знімання. Тому треба надати особливу увагу вибору положення бази. Загальні настанови, хід та
397
Розділ III
послідовність виконання робіт на базовому приймачі абсолютно такі самі, як і під час статичного режиму знімання, описані в попередньому параграфі (пункти 1-15).
Різниця тільки у можливості використання на базовій станції ініціалізаційної рамки для ініціалізації (хоча це не обов'язково, оскільки є інші методи ініціалізації).

Рис. III.3.31. Антена РгоМагк-2 із рамкою ініціалізації
Під час використання рамки (рис. ІП.3.32) базова антена центрується і приводиться в горизонтальний стан над маркою (центром) геодезичного пункту. Антена ровера встановлюється зі зміщенням відносно базової антени на рамку ініціалізації (рис. Ш.3.31).
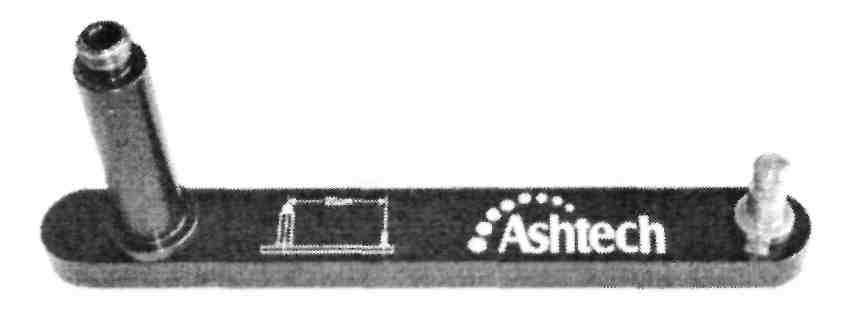
Рис. 111.3.32. Рамка ініціалізації
Ця рамка забезпечує формування точної базової лінії між базою та ровером завдовжки 0,2 м.
Після виконання ініціалізації антена роверного приймача переноситься на роверну віху (рис. ІП.3.33).
398
Просторові
супутникові
мережі
(основи
супутникової
геодезії)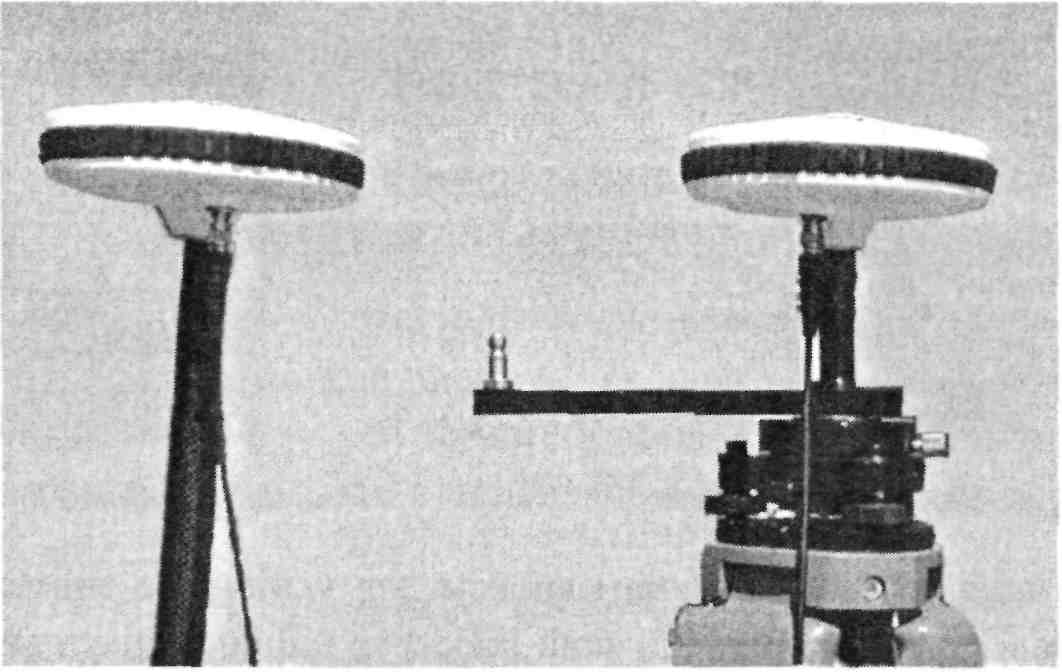
Рис. 111.3.33. Антена ровера, перенесена з ініціалізаційної рамки на віху
Усі подальші дії виконують точно так само, як описано у пунктах 1-15. Базовий приймач повинен виконувати вимірювання весь час, як це передбачено в плані польових робіт. Далі детально буде описана робота роверного приймача у режимі "стій/йди" ("stop-and-go").
Для роверного приймача дії 1-3 абсолютно аналогічні до дій під час статичного режиму та дій на базовій станції.
У меню Survey Menu (Меню в режимі "Знімання") вибирають пункт Survey Mode (Режим "Знімання"). Далі встановлюють режим "стій/йди".
У Survey Menu вибирають Point Attribute (Опис точки). Вводять атрибутивну інформацію про точку, на якій буде виконуватися знімання.
Виділений пункт Point Attribute (Опис точки) зображено на рис. III.3.34. Екран Point Attribute містить такі параметри:
чотиризначний ідентифікатор пункту. Необхідно присвоїти ідентифікаційний номер кожній точці, що знімається;
таймер перебування на пункті, який працює за принципом секундоміра;
довільний 20-значний опис пункту;
вибіркове встановлення режиму ініціалізації: без ініціалізації, ініціалізація на точці з відомими координатами, ініціалізація на точці з використанням рамки ініціалізації;
вибіркове встановлення контрольної точки; встановлюють "Yes", якщо точка є контрольною. Ідентифікаційний номер пункту копіюється у таблицю ідентифікаторів пунктів, координати яких відомі.
399
Розділ III
Point Attribute