

111.3.2. Системи координат, що використовуються у космічній геодезії
Положення пунктів ДГМ визначається у двох системах координат: за-гальноземній та референцній. Між обома системами встановлюється однозначний зв'язок, який визначається параметрами взаємного переходу (елементами орієнтування).
За загальноземну систему координат приймається Європейська геоцентрична система координат ETRF-89 із початком координат у центрі мас Землі та з відліковим еліпсоїдом GRS-80, що має такі параметри:
велика піввісь a = 6378137 м;
стиснення еліпсоїда 1:298,2572220101;
мала піввісь b = 6356752 м;
середній радіус /?, = 6371008,7714 м;
значення нормального гравітаційного поля на екваторі ge = 9,7803267715 мс"2;
g_
=
9,8321863685 мс"2;
• перший ексцентриситет є1 = 0,00669438002290.
Референцною системою координат залишається система координат 1942 року (СК-42) із вихідними даними референц-еліпсоїда Красовського:
велика піввісь a = 6378245 м;
мала піввісь Ь = 6356863 м;
стиснення еліпсоїда 1:298,3;
висота геоїда в Пулково над референц-еліпсоїдом дорівнює нулю;
геодезичні координати Пулковської обсерваторії (центр сигналу А);
широта В = 59°46'15,359";
довгота від Гринвіча L = 28°19'28,318";
геодезичний азимут на пункт Бугри 121°06'42,305";
середній радіус Землі 6371117,6729 м;
перший ексцентриситет є = 0,006693420623. Положення пунктів у прийнятих системах задаються:
• просторовими прямокутними координатами X, Y , Z . Вісь X ле жить у площині нульового меридіана, вісь У-у площині екватора і спрямована праворуч від площини нульового меридіана, а напрямок осі Z збігається з віссю обертання відлікового еліпсоїда;
367
Розділ
III
геодезичними
еліпсоїдальними координатами В,
L,H
;
плоскими
прямокутними координатами X,
Y
.
Рис. 111.3.1. Прямокутні геоцентричні координати, координати X, Y, Z
та геодезичні еліпсоїдальні координати В, L; АО - прямовисна лінія;
АК - нормаль до еліпсоїда в точці А; АА' - Н - геодезична висота точки А
Нагадаємо: геодезична широта В точки А - це кут, створений нормаллю до поверхні еліпсоїда із площиною екватора; геодезична довгота L точки А -це двогранний кут, створений площиною початкового меридіана та площиною геодезичного меридіана. Геодезичний меридіан проходить через нормаль до еліпсоїда АК і паралельний до полярної осі РР'. Геодезична висота - відрізок по нормалі до еліпсоїда від поверхні еліпсоїда до пункту на фізичній поверхні Землі.
Плоскі прямокутні координати, відомі з курсу топографії, обчислюються на площині у комфорній проекції Гаусса-Крюгера у шестиградусних зонах, а під час знімання у масштабах 1:5000 і більше - у триградусних зонах.
Осьові меридіани шестиградусних зон на території України - 21°, 27°, 33°, 39°, а триградусних зон - 21°, 24°, 27°, 30°, 33°, 36°, 39°.
Геодезичні висоти пунктів ДГМ визначаються безпосередньо або обчислюються як сума нормальної висоти й висоти квазігеоїда над еліпсоїдом:
H = HHop+N, (Іїї.3.1)
368
Просторові супутникові мережі (основи супутникової геодезії)
 де
Н
- геодезична
висота; Н
-
нормальна висота; N
- висота
квазігеоїда над
де
Н
- геодезична
висота; Н
-
нормальна висота; N
- висота
квазігеоїда над
відліковим еліпсоїдом. Нормальні висоти пунктів ДГМ визначаються у Балтійській системі висот, вихідним пунктом якої є нуль Кронштадтського футштока. Нижче подано формули переходу від еліпсоїдальних геодезичних координат до просторових прямокутних координат X, Y, Z, які широко застосовують у космічній геодезії:

X = (N' + H) cosBcosL;
(III.3.2)
![]()
Y = (N' + H) cos Я-sin L; \
де
N'
=
cosz В + Ь sinz В мала півосі відлікового еліпсоїда.
Обернений перехід від X, Y, Z неминуче пов'язаний з ітераційним процесом обчислення широти В і висоти Н. Зручні для обчислення на комп'ютері формули можна отримати із системи рівнянь (ІП.3.2):
tgL = -
(III. 3.2)
Формули (III.3.3) дають змогу організувати цикл наближень. Для першого наближення приймається tgB = С. Для другого та наступних наближень за значенням В з попереднього наближення розраховують значення:
Я = л/х2 + Y2 secB- N'; а
(Ш.3.4)
Зазвичай для досягнення розбіжності між наступним і попереднім наближеннями В = 0,03" достатньо трьох наближень. Перехід від еліпсоїдальних геодезичних координат В, L, Н до плоских координат X, Y студенти виконують під час розрахунків координат кутів рамки трапеції плану масштабу 1:2000.
Астрономічні широти й довготи, які визначаються на пунктах ATM, обчислюються в екваторіальній астрономічній системі координат (рис. ІП.3.2).
369
Розділ
III
Рис. II1.3.2. Екваторіальні астрономічні системи координат (екліптика не показана)
NS - горизонт; z - зенітна віддаль супутника (дуга Zc);
QQ - екватор; h - висота супутника (дуга оК);
Р - полюс; 5 - схилення супутника (дуга оМ);
N - точка півночі; ОС - пряме сходження супутника (дуга уМ);
S - точка півдня; / - часовий кут супутника;
Z - точка зеніту; a - азимут супутника;
Z - точка надиру; ty - часовий кут точки весняного рівнодення (ty = t + a );
0-світило-супутник; ф-широта
у- точка весняного рівнодення;
Як відомо, часовий кут точки весняного рівнодення ty числово дорівнює
зоряному часу у момент спостережень у певній точці А, а різниця довгот АХ, у двох точках дорівнює різниці у часі в цих точках.
Екваторіальна система координат відповідає фундаментальному зоряному каталогу на епоху загального врівноваження ДГМ і приводиться до міжнародного умовного початку й системи астрономічних довгот X Міжнародного бюро часу.
370
Просторові супутникові мережі (основи супутникової геодезії)
Для побудови ДГМ використовується атомний час, який задається шкалою Державного еталона часу й частоти (з урахуванням поправок за перехід до системи міжнародного координатного часу). Масштаб ДГМ задається державним еталоном довжини - метром, за довжину якого приймається відстань, яку проходить світло у вакуумі за 1:299792458 частку секунди.
Метрологічне забезпечення геодезичних робіт здійснюється із використанням метрологічної бази Держстандарту створенням мережі відомчих взірцевих базисів, основних довготних пунктів та еталонних азимутів.
Нагадаємо, що у геодезії використовуються не абсолютні, а відносні супутникові спостереження і, по суті, застосовується топоцентрична система координат. Прямокутні координати в цій системі будуть дорівнювати різниці координат двох точок кінців базисної лінії 1 та 2.
(ПІ.3.5)
Сферичні координати у топоцентричній системі можуть бути визначені за довжиною сторони Д2 та кутами Л і Ф, аналогічними кутам а і 8 в зоряній системі координат (рис. ІП.3.2).
Зауважимо, що коли за основну площину XOY прийнято площину, яка паралельна до екватора, то кут Л12 відраховується від меридіана Гринвіча до проекції Д2 на цю площину. Кут Ф12 характеризує нахил лінії Д2 до екватора.
Кути Л і Ф в екваторіальній топоцентричній системі називають орієнтуючими кутами сторони Д2.

Кути можна знайти за формулами
АХ
(ІП.3.6)
Зворотний перехід можна виконати за формулами
(ІП.3.7)
cos Ф ■ созЛ: ^ cos Ф • sin Л sin Ф.
Детальніше це описано у [2].
371
 Розділ
III
Розділ
III
111.3.3. Проектування та рекогностування просторових супутникових геодезичних мереж (СГМ)
Основним завданням технічного проектування СГМ є оптимальне положення пунктів на місцевості, яке залежить від вартості робіт, дотримання заданої точності та щільності, однорідності та правильної геометрії, тривалого збереження центрів.
Для складання проекту, передусім, необхідно зібрати дані про фізико-географічні, економічні особливості та раніше виконані геодезичні роботи на території. Інформацію про геодезичні роботи, виконані раніше, надає інспекція Державного геодезичного нагляду. Такі матеріали містять:
загальний список усіх звітів раніше виконаних робіт, роки виконання, назви організації виконання робіт;
виписки з каталогів координат та висот пунктів, їхні класи;
картки закладання центрів;
схеми геодезичних побудов;
дані про системи координат та висот.
Проект мережі створюють на топографічних картах масштабів 1:200000-1:10000. На карту наносять всі наявні пункти. Нові пункти необхідно розташовувати у вершинах рівносторонніх трикутників. Рекомендуються два найпоширеніші методи побудови супутникових мереж:
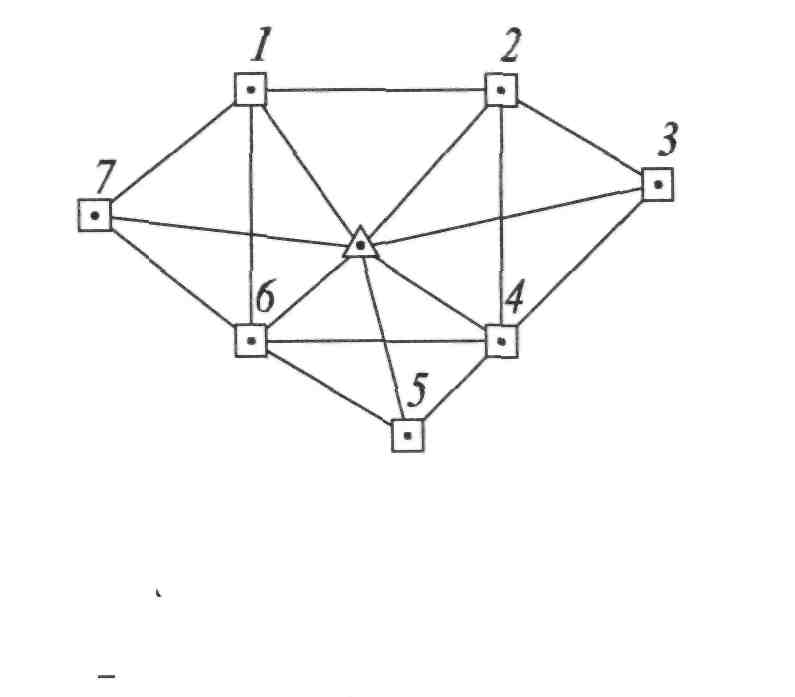
радіальний, коли всі пункти мережі координуються з однієї рефе-ренцної або перманентної станцій (рис. ІІІ.З.З);
мережевий метод (метод замкнутих геометричних фігур) -вимірювання виконуються на кожній лінії або на кожному пункті мережі (рис. ІІІ.З.З).


372
Просторові супутникові мережі (основи супутникової геодезії)
Недоліками радіального методу є неминуче виникнення довгих векторів та відсутність контрольних вимірів. Перевагою є те, що можна виконувати побудову одним приймачем і те, що побудована мережа однорідна за точністю.
Контролем у такій мережі можуть бути тільки незалежні вимірювання іншими приладами та від інших відомих точок. Критерій точності і надійності вимірів підвищується, якщо організуються мережеві вимірювання. На практиці застосовують дві технології мережевих побудов:
повторного вимірювання на пунктах, для яких задається кількість обов'язкового повторного вимірювання на кожній мережі;
обов'язкового вимірювання кожної лінії мережі.
Щоб позбутися довгих векторів, необхідно мати декілька референцних пунктів. На жаль, виникають різноточні (багаторангові) мережі (рис. Іїї.3.5). Крім того, необхідно мати декілька приймачів.

373
Розділ III
Мінімальна кількість сесій (сеансів) спостережень N для мережі, якщо кількість пунктів S і використовується R приймачів для кількості повторних вимірювань М та кількості приймачів, які використовувались у попередній та наступній сесіях О, визначається для першої технології (спостереження на кожному пункті) за формулою
![]()
MS
(ПІ.3.8)
а для другої технології (вимірювання кожної лінії) за формулою
![]() (ІП.3.9)
(ІП.3.9)
Друга технологія (вимірювання усіх векторів) поширеніша.
На рис. ИІ.3.6 подано схему, яка пояснює послідовність вимірювання і перенесення станцій для другої технології. На схемі подано 20 пунктів, назви яких складаються з букви та цифри. Наприклад, лівий верхній пункт А-1, нижній правий пункт D-5 і т. д. Усіх приймачів шість. Використовувались три приймачі, які залишалися на тих самих пунктах у попередній та наступній сесіях.

12 3 4 5
-і—(ї)—2—(•)—З—Q)
4
(•)
1\2
Тому
кількість сесій N
=![]()
У першій сесії приймачі встановлені на пунктах А-1, В-1, С-1, А-2, В-2, С-2. Були виміряні сім векторів. Далі, для виконання другої сесії приймачі з пунктів А-1, В-1, С-1 були перенесені на пункти А-3, В-3, С-3. Знову в другій
374
Просторові супутникові мережі (основи супутникової геодезії)
 сесії
були виміряні сім векторів і так далі.
Усього у чотирьох сесіях були виміряні
28 векторів.
сесії
були виміряні сім векторів і так далі.
Усього у чотирьох сесіях були виміряні
28 векторів.
У сесії 5 на пунктах залишилось два приймачі: на пунктах С-4, С-5. Інші чотири приймачі з пунктів А-4, А-5, В-4, В-5 були перенесені в пункти С-3, D-3, D-4, D-5. Виміряні сім векторів.
Нарешті, у сесії 6 два приймачі залишались на тих самих пунктах С-3, D-3, а приймачі, що стояли на пунктах С-4, С-5, D-4, D-5, були встановлені на пунктах С-1, С-2, D-l, D-2, виміряні дев'ять векторів.
У результаті виявилось, що на двох пунктах були виконані однократні вимірювання, на 12-ти пунктах - двократні вимірювання, на 3-х - трикратні і на 3-х - чотирикратні вимірювання. Зрозуміло, що точність визначення координат неоднакова. Проте повторні вимірювання є доброю основою для контролю вимірювань та для надійної оцінки їхньої точності. Необхідно пам'ятати, що під час створення великих мереж доцільно використовувати максимально можливу кількість приймачів. Це зумовить зменшення кількості сесій, а, отже, приведе до скорочення часу на спостереження. В ідеальному випадку, коли кількість приймачів збігається із кількістю пунктів мережі, спостереження виконуються за одну сесію.
Розрахунок кількості векторів W, що вимірюються у цій сесії, можна виконати за формулою
![]()
w
=
R(R
-1)
^ (Ш.3.10)
де R - кількість приймачів.
Зазначимо, що кількість одночасно виміряних векторів зростає швидше ніж кількість приймачів.
R |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
W |
3 |
6 |
10 |
15 |
21 |
28 |
36 |
45 |
55 |
66 |
78 |
Під час проектування СГМ з метою висотного прив'язування необхідно передбачити включення в мережу мінімум чотирьох висотних реперів відповідного класу. З метою підвищення надійності та контролю визначення параметрів переходу між ETRF-89 і СК-42 рекомендується включати в СГМ уже існуючі пункти того самого або вищого класу, розташовані на території робіт і визначені тільки в системі координат СК-42.
Польове рекогностування пунктів мережі здійснюється на підставі затвердженого технічного проекту.
375
Розділ III
Рекогностування розпочинається з відшукування на місцевості та обстеження стану наявної геодезичної основи, до якої планується прив'язування нових пунктів. Оцінюється стан пункту; його збереженість; порушення зовнішнього оформлення; стан споруд, у які закладені стінні знаки; наявність і розмір тріщин у стінах; видимі зміщення фундаменту. Репери, закладені в зруйновані споруди або споруди з видимими деформаціями, розташовані біля залізничних шляхів, вважають нестійкими. До нестійких належать також репери, закладено в споруди, навколо яких є значна вологість або які закладені в місцевість зі штучним або природним зволоженням ґрунту, у торф'яниках тощо.
Рекогностувальна бригада виконує відновлювальні роботи: бетонує відколений кут пілона, наносить протиерозійну суміш на марку, верхню частину репера, відновлює розпізнавальний знак та стовп із охоронним написом, зовнішнє оформлення.
Важливим завданням рекогностування є уточнення на місцевості місць закладання нових реперів.
Вважають за доцільне поєднувати рекогностування із закладанням нових пунктів. Пункти для супутникових спостережень вибирають з дотриманням таких вимог:
відсутність на висоті 15° над горизонтом перешкод для проходження радіосигналів;
відсутність поблизу пункту відбивних поверхонь (металеві дахи, водні поверхні, рекламні щити, металеві огорожі);
відсутність поблизу джерел електромагнітного та радіовипромінювання;
віддаленість від доріг (з погляду безпеки та впливів вібрації під час спостережень).
Окрім пунктів мережі, на відстані 500-1000 м закладаються два орієнтирні пункти, на які забезпечується видимість (земля-земля). У разі неможливості виконання супутникових спостережень над центром знака допускається встановлення антени приймача поза центром, але елементи приведення повинні бути мінімальними, а під час висотного прив'язування повинна бути можливість передавання висоти на антену приймача геометричним нівелюванням.
У результаті виконання рекогностування, будівельних робіт подаються такі документи:
остаточна схема мережі;
уточнені схеми прив'язувальних ліній, передавання висот через водні перешкоди;
376
 Просторові
супутникові
мережі
(основи
супутникової
геодезії)
Просторові
супутникові
мережі
(основи
супутникової
геодезії)
акти обстеження та оновлення пунктів;
карти рекогностування, обстеження, оновлення та побудови геодезичних пунктів;
акти втрати пунктів;
акти перезакладання центрів;
акти здачі пунктів на зберігання.
За результатами рекогностування складають кінцевий проект мережі і загальну програму виконання робіт із зазначенням супутникових технологій, якими будуть виконуватися вимірювання. Ці дані подаються в технічному звіті про результати рекогностування та закладання знаків. Графік виконання й закінчення робіт створюється відповідно до обсягів робіт та можливостей виконавця.
Кошторис на виконання робіт складають згідно з нормативними документами, затвердженими Державною геодезичною службою України.