

9.8.4. Управление двигателями переменного тока
Высококачественные электроприводы должны иметь широкий диапазон регулирования скорости вплоть до нулевой, обеспечивать полное управление вращающим моментом, интенсивное ускорение и торможение. В прошлом в широкодиапазонных электроприводах преобладали коллекторные двигатели постоянного тока из-за их лучших регулировочных характеристик. Однако эти двигатели имеют малую надежность и небольшой ресурс, требуют трудоемкого обслуживания, порождают мощные радиопомехи. В последнее время более широкое распространение в регулируемом приводе получили трехфазные двигатели переменного тока, такие, как асинхронные (АД) и синхронные (СД) с магнитным или электромагнитным возбуждением, а также синхронные реактивные двигатели (РД). Это двигатели значительно надежнее, почти не требуют обслуживания, имеют более высокую удельную мощность, особенно при высоких частотах вращения.
До недавнего времени управление двигателями переменного тока осуществлялось довольно примитивным образом, путем изменения частоты тока, питающего статорные обмотки в зависимости от величины и знака ошибки по скорости. Это ограничивало их применение низкодинамичными приводами со сравнительно узким диапазоном регулирования. Сейчас все шире используются более передовые способы регулирования, направленные на создание в машине магнитных полей, интенсивность и положение которых являются оптимальными при данном положении ротора двигателя. Эти способы базируются на решении уравнений Парка—Горева и, по сути, сводятся к позиционному управлению вектором магнитного поля машины. Такое управление часто называют векторным. Векторное управление требует большого объема вычислений, которые совсем недавно не могли быть выполнены в реальном времени за приемлемую цену.
Сейчас ситуация изменилась. Появились недорогие однокристальные цифровые процессоры сигналов (ЦПС) с высокой производительностью, которые позволили обеспечить полосу пропускания контура регулирования до 4 кГц при выполнении этими процессорами векторных преобразований сигналов, пропорциональных токам и напряжениям двигателя. Эти преобразования включают вычисления в реальном времени синуса и косинуса угла поворота ротора, плюс операции «умножение—накопление» [9.9].
Для управления высококачественным сервоприводом переменного тока требуется дискретизирующее АЦ-преобразование сигналов, пропорциональных токам статора. Номинальный режим работы двигателя характеризуется мощностью на валу, которую двигатель может развивать не перегреваясь в течение продолжительного времени. Кратковременно двигатель может развить мощность, превосходящую номинальную в несколько раз (некоторые типы двигателей — шестикратно). В широкодиапазонных следящих и программно-управляемых приводах двигатель работает значительную часть времени с пониженными нагрузками, но кратковременно — со значительными перегрузками. Еще 25 лет назад международная электротехническая комиссия (МЭК) рекомендовала для привода станков с программным управлением диапазоны регулирования скорости вплоть до 30000:1. Все это требует для систем векторного управления приводами применения АЦП высокой разрядности (до 12... 14 бит). Второе требование, предъявляемое к АЦП: одновременное осуществление выборки, по крайней мере, по двум каналам. В этом случае, зная мгновенное значение тока в двух фазах при обычно трехпроводном включении двигателя, мы можем рассчитать ток в третьей фазе. Любая задержка между считываниями приведет к значительной погрешности определения тока.
Несколько фирм выпускают системы сбора данных, ориентированные на применение в системах векторного управления двигателями переменного тока. Например, микросхемы семейства AD7862/3/4 (Рис. 9.38) включают по два АЦП (каждый со своим УВХ) и по два входных аналоговых мультиплексора мих.
С помощью входных делителей можно в некоторых пределах изменять полную шкалу входных сигналов. AD7862/4 имеют 12-разрядные АЦП, a AD7863 — 14-разрядные.
Впоследствии разработчики резонно посчитали, что для систем, не требующих очень высокого быстродействия, достаточно использовать один АЦП, но с
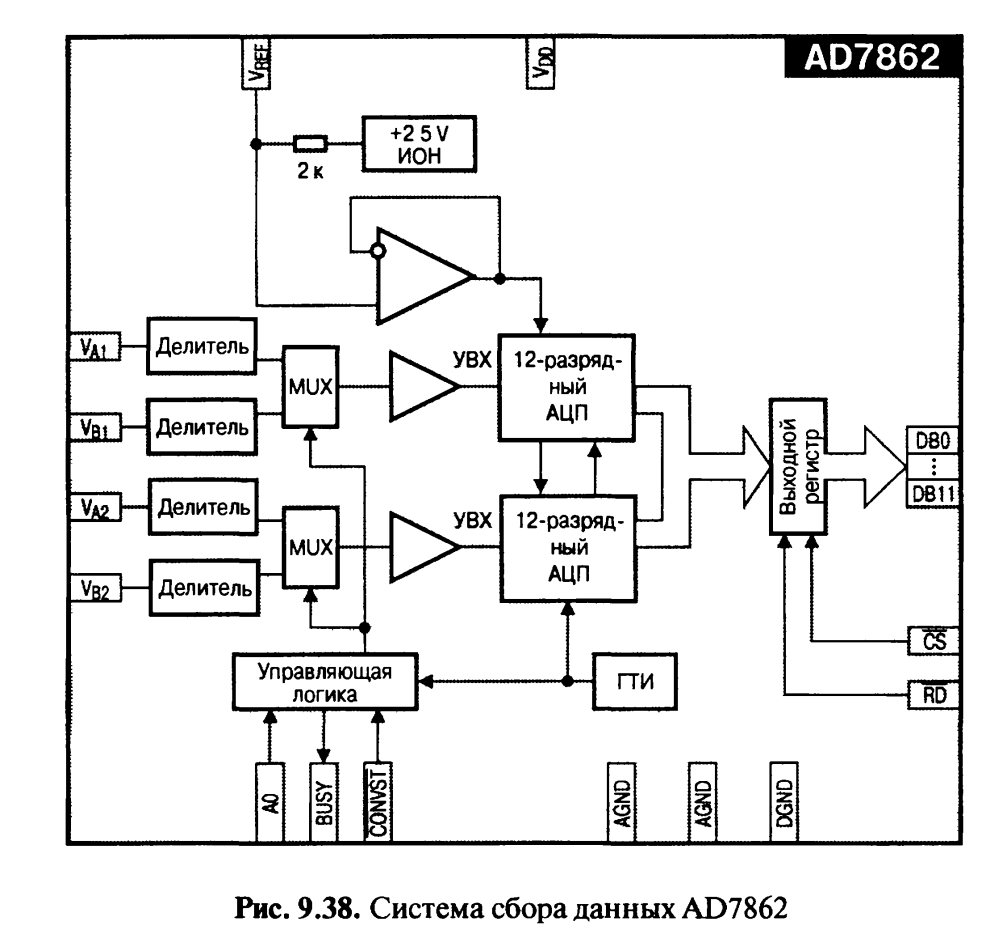
четырьмя УВХ на входах 4-х канального мультиплексора. Так появился более дешевый 14-разрядный AD7865.
Типовое включение систем сбора данных этого семейства показано на Рис. 9.39.
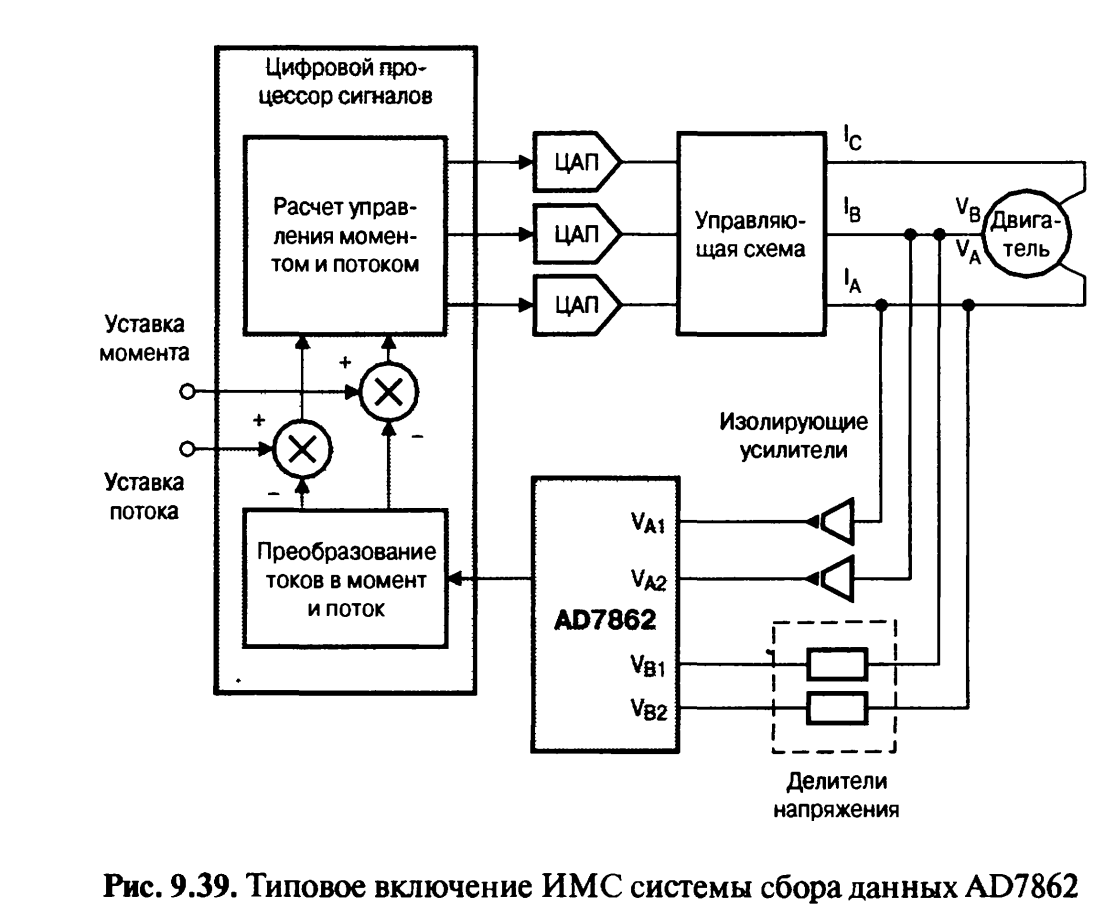
Недостатком этой схемы является отсутствие информации о текущем положении ротора, которая необходима для более точного управления двигателем.
В приводах на основе синхронных двигателей такая информация абсолютно необходима для обеспечения оптимального угла выбега ротора. Поэтому обычно двигатели снабжаются магнитными датчиками положения ротора на эффекте Холла. Для недорогих приводов применение датчиков положения ротора может оказаться накладным, тогда применяют метод оценивания угла поворота ротора по Калману, основываясь на значениях токов и напряжений двигателя. Это, однако, требует большей вычислительной мощности ЦПС и не обеспечивает необходимой точности при низких скоростях привода.
Фирма Burr-Brown выпускает систему сбора данных ADS7864, ориентированную на применение в системах векторного управления двигателями переменного тока с датчиками положения ротора. Блок-схема этой системы приведена на Рис. 9.40.

Микросхема ADS7864 содержит два 12-разрядных АЦП последовательного приближения с максимальной частотой преобразований 500 кГц и шесть УВХ, которые могут одновременно производить выборку шести дифференциальных сигналов.
Два дифференциальных мультиплексора 3x1 подключают поочередно выходы УВХ к входам АЦП, также дифференциальным. Такое построение аналоговой части позволяет обеспечить подавление синфазного сигнала на 80 дБ вплоть до частоты 50 кГц. Для упрощения передачи данных процессору в состав микросхемы входит память типа FIFO (first input — first output) емкостью шесть 16-битных слов (адрес и данные).
Сравнительно недавно фирма Analog Devices начала выпуск однокристальных контроллеров семейства АОМСЗхх для векторного управления трехфазными электродвигателями. Упрощенная блок-схема системы управления двигателем показана на Рис 9.41.
На входы регулятора поступают сигналы, зависящие от токов двигателя, а также от положения и скорости вращения его ротора. Первичным датчиком положения здесь является синусно-косинусный вращающийся трансформатор (СКВТ). Цифровой процессор сигналов используется для векторных вычислений в реальном времени, необходимых для генерации сигналов управления ключами трехфазного мостового инвертора. ИМС ADMC300 располагает 5-канальным 16-разрядным сигма-дельта АЦП и трехфазным цифровым ШИМ-контроллером с разрешением 12 бит на период, а также имеет гибкий интерфейс кодера датчика положения ротора. Микросхемы ADMC330/1 содержат 7-канальные АЦП последовательного счета с 12-битным разрешением и

программируемый 3-фазный 16-разрядный ШИМ-генератор. В качестве процессорного ядра всех этих микросхем используется 16-разрядный ЦП С с фиксированной точкой фирмы Analog Devices ADSP-2171, имеющий быстродействие 20 MIPS (млн команд в с).
Для улучшения формы токов, питающих обмотки двигателя, контроллер с помощью широтной модуляции импульсов, управляющих ключами инверторов, формирует синусоидальные (в среднем) напряжения на выходе силового инвертора. Частота управляющих импульсов, модулированных по ширине, регулируется в пределах до 20 кГц. Это позволяет инвертору генерировать квазисинусоидальное трехфазное напряжение в диапазоне частот 0...250 Гц. В микросхемах ADMC3xx обеспечивается разрешающая способность по времени ШИМ-контроллерадо 38 не.
Из-за невысокого быстродействия АЦП этих микросхем невозможно отслеживать мгновенные значения токов двигателя, что снижает возможности контроля над формой токов и оценивания положения ротора по информации о токах. В этом отношении лучшими характеристиками обладает ADMC401. Эта микросхема включает 8-канальный 12-разрядный конвейерный АЦП, имеющий время преобразования менее 2мкс. В отличие от ADMC3xx в состав ADMC401 входит встроенный интерфейс кодера положения.
48. Принцип работы генераторов.
В радиоэлектронике, вычислительной технике, системах автоматического управления используют генераторы сигналов – устройства, которые служат для получения периодических незатухающих колебаний заданной формы.
Главная особенность колебаний, наблюдаемых в генераторе, состоит в том, что они обусловлены не внешними воздействиями, а свойствами устройства. Такие колебания, возникающие самостоятельно, в отсутствие внешних воздействий, называют автоколебаниями.
Структурная схема генератора сигналов показана на рис. 1.
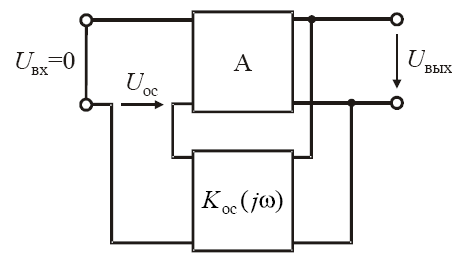
Рисунок 1 – Структурная схема генератора сигналов
Здесь А – коэффициент передачи усилителя.
Она состоит из двух частей – усилителя (активного элемента) и частотно-селективной цепи положительной обратной связи с передаточной функцией Kос (jw), по которой колебания с выхода усилителя поступают на его вход.
Рассмотрим качественно процессы, происходящие в генераторах периодических колебаний. Причиной возникновения колебаний служат флуктуации – слабые колебания, происходящие случайным образом. Флуктуации наблюдаются в любой реальной цепи. Колебания, возникающие на входе активного элемента, усиливаются и через цепь обратной связи вновь поступают на вход. Поскольку обратная связь положительна, сигналы на входе складываются, а выходной сигнал лавинообразно растет. Такой процесс называют самовозбуждением генератора. На рис. 2 показан процесс самовозбуждения генератора синусоидальных колебаний.
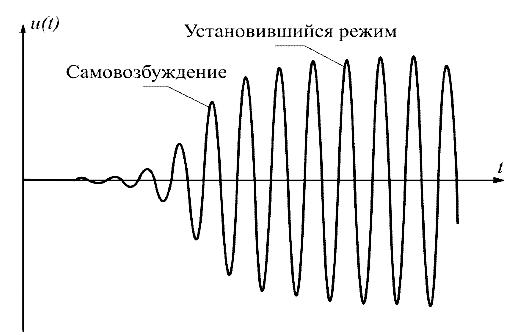
Рисунок 2 - Процесс самовозбуждения генератора синусоидальных колебаний
Самовозбуждение имеет место, если коэффициент передачи в замкнутой петле обратной связи больше единицы:
K = A×Kос(jw) > 1. (1)
В (1) мы полагаем, что коэффициент передачи усилителя А не зависит от частоты.
Нарастание колебаний происходит до тех пор, пока активный элемент
не перейдет в нелинейный режим. При этом коэффициент усиления уменьшается до значения, при котором коэффициент передачи в замкнутой петле обратной связи становится равным единице:
K = A×Kос(jw) = 1. (2)
При выполнении такого условия в генераторе устанавливается стационарный режим (рис. 1). В этом режиме колебания имеют постоянную амплитуду и частоту. Если условие (2) выполняется только на частоте ω0 , колебания имеют синусоидальную форму. Если это условие выполняется на нескольких частотах, колебания на выходе генератора имеют сложную форму, а спектр содержит гармоники с частотами, на которых выполняется условие (2).
Таким образом, в зависимости от частотных характеристик цепи обратной связи форма колебаний может иметь синусоидальную или несинусоидальную форму. Соответственно различают генераторы гармонических колебаний и импульсные. Для получения гармонических колебаний необходимо использовать цепь обратной связи второго или более высокого порядка, имеющую, как правило, резонансные характеристики. Цепи обратной связи импульсных генераторов имеют обычно первый порядок.
Рассмотрим подробнее условия, при которых в генераторе наступает стационарный режим. Представим коэффициент передачи цепи обратной связи в комплексной форме:
Kос (jw) = |Kос (jw)|ejφ(w) .
Тогда условие (2) можно записать в виде
A× |Kос (jw)| = 1; (3)
φ(w
) = 2n , n = 0,1,
2,.. (4)
, n = 0,1,
2,.. (4)
Равенство (3) называют условием баланса амплитуд, а равенство
(4) – условием баланса фаз. Одновременное выполнение условий (3) и (4) соответствует установившемуся режиму работы генератора. Эти условия называют в специальной литературе критерием Баркхаузена.
Генераторы гармонических колебаний классифицируют по виду используемых частотно-избирательных цепей. Широкое распространение получили LC- и RC-генераторы. В кварцевых генераторах в качестве частотно-избирательной цепи используют кварцевый резонатор – пластину кварца, обработанную таким образом, что она имеет определенную частоту колебаний.
49. RC-генераторы гармонических колебаний.
2. RC-генераторы гармонических колебаний
Для получения гармонических колебаний низкой частоты использование LC-генераторов нецелесообразно, так как элементы колебательного контура имеют слишком большие размеры. Для получения колебаний низких частот (менее 10 кГц) используют RC-генераторы. В качестве цепей обратной связи применяют многозвенные RC-цепи, мост Вина – Робинсона, двойные Т-образные мосты. Наибольшее распространение получили генераторы с мостом Вина – Робинсона, а также генераторы с фазосдвигающей RC-цепью.
RC-генератор с мостом Вина – Робинсона. Схема генератора показана на рис. 3. Операционный усилитель и резисторы R1, R2 реализуют усилитель с коэффициентом передачи
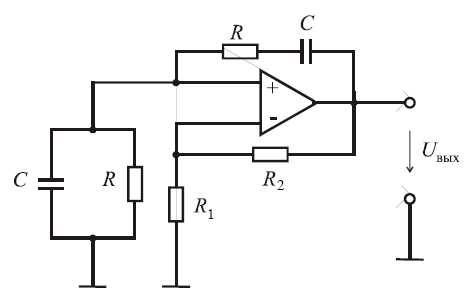
Рисунок 3 – RC-генератор с мостом Вина – Робинсона
Цепью обратной связи служит мост Вина – Робинсона (мост Вина), показанный на рис. 4. Для упрощения выводимых соотношений сопротивления резисторов и емкости конденсаторов в продольной и поперечной ветвях моста выбраны одинаковыми. Передаточная функция моста Вина
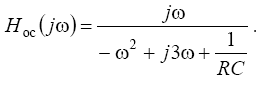
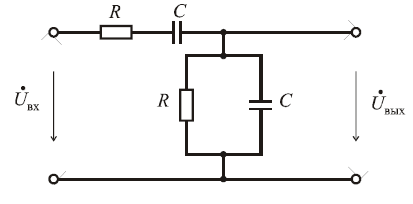
Рисунок 4 – Мост Вина – Робинсона (мост Вина)
Амплитудно-частотная характеристика принимает максимальное значение, равное 1/3, на частоте
![]() .
.
Значение
фазочастотной характеристики на этой
частоте равно нулю. Условие баланса
амплитуд на частоте
![]() выполняется, если коэффициент передачи
усилителя A = 3. Такое усиление
обеспечивается при
выполняется, если коэффициент передачи
усилителя A = 3. Такое усиление
обеспечивается при

На этапе самовозбуждения для нарастания амплитуды колебаний должно выполняться условие, когда коэффициент передачи A > 3. В установившемся режиме коэффициент передачи усилителя должен уменьшиться до 3. Для стабилизации коэффициента усиления в цепь обратной связи ОУ включают нелинейные элементы. В простейшем случае в качестве резистора R1 включают маломощную лампу накаливания, сопротивление которой увеличивается по мере ее нагрева. При включении генератора сопротивление лампы мало и коэффициент передачи усилителя
По мере увеличения тока через лампу ее сопротивление увеличивается, а коэффициент усиления А падает. В генераторе наступает установившийся режим. Такая нелинейная обратная связь в усилителе является инерционной и не искажает форму сигнала.
Другой вариант RC-генератора с нелинейной цепью обратной связи показан на рис. 5. Нелинейной цепью является двухполюсник, образованный параллельным соединением резистора R0 и двух встречно включенных диодов.
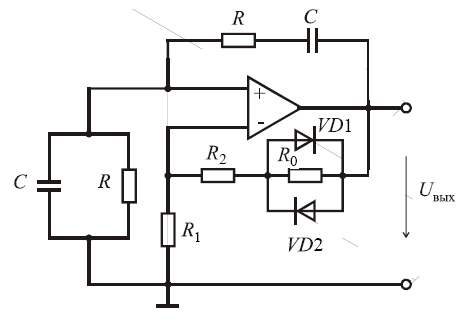
Рисунок 5 – RC-генератор с нелинейной цепью обратной связи
Напряжение на зажимах нелинейного двухполюсника не превышает 0.7 В (в случае кремниевых диодов). Поэтому по мере нарастания выходного напряжения коэффициент усиления уменьшается до 3.
RC-генераторы с мостом Вина используют для получения гармонических колебаний частотой от 1 Гц до 200 кГц. Перестройку частоты осуществляют путем одновременного изменения сопротивлений резисторов в мосте.
RC-генератор с фазосдвигающей цепью. Другой тип низкочастотного RC-генератора – генератор с фазосдвигающей цепью. Один из вариантов такого генератора показан на рис. 6.
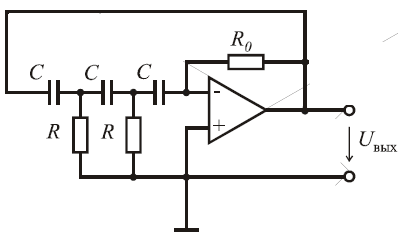
Рисунок 6 – RC-генератор с фазосдвигающей цепью
Операционный усилитель и резистор R0 реализуют преобразователь ток-напряжение (ИНУТ), передаточное сопротивление которого равно R0. В качестве цепи обратной связи используется трехзвенная фазосдвигающая RC-цепь. Сопротивления резисторов и емкости конденсаторов выбраны одинаковыми. Трехзвенная цепь выбрана потому, что это RC-цепь минимального порядка, обеспечивающая требуемый фазовый сдвиг.
Передаточная проводимость цепи обратной связи

На
частоте
![]() передаточная проводимость принимает
вещественное значение, равное
передаточная проводимость принимает
вещественное значение, равное
![]()
Условие
баланса амплитуд на частоте
![]() выполняется, если
выполняется, если
![]()
С ростом амплитуды выходного напряжения операционный усилитель
перейдет в насыщение и колебания будут иметь несинусоидальную форму. Для ограничения размаха выходных колебаний в установившемся режиме цепь обратной связи должна быть нелинейной. Например, последовательно с резистором R0 можно включить нелинейный двухполюсник.
50. Генераторы прямоугольных импульсов.
В вычислительной технике, радиотехнике, телевидении, системах автоматического управления используют релаксационные генераторы, предназначенные для получения колебаний несинусоидальной формы (прямоугольной, треугольной и т. д.). Генераторы, предназначенные для получения колебаний прямоугольной формы, называют мультивибраторами.
Структурная схема релаксационного генератора аналогична структуре генератора гармонических колебаний. Отличие заключается в том,
что в релаксационном генераторе используется цепь обратной связи первого порядка, а активный элемент работает в нелинейном режиме.
Схема мультивибратора на операционном усилителе показана на рис. 7.
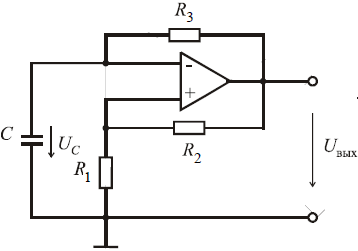
Рисунок 7 – Схема мультивибратора на операционном усилителе
Активным
элементом является инвертирующий
триггер Шмитта, реализованный на ОУ и
резисторах R1 , R2 . Резистор R3
и конденсатор C формируют времязадающую
цепь, определяющую длительность
формируемых импульсов. Операционный
усилитель охвачен положительной обратной
связью (цепь R1 – R2 ) и находится
в режиме насыщения, поэтому напряжение
на выходе Uвых = ±Uнас . Переключение
ОУ из положительного насыщения в
отрицательное и обратно происходит,
когда напряжение на инвертирующем входе
достигает положительного и отрицательного
порогов срабатывания, равных +
 Uнас
и -
Uнас
соответственно. Здесь
– коэффициент обратной связи:
Uнас
и -
Uнас
соответственно. Здесь
– коэффициент обратной связи:
![]()
Передаточная характеристика триггера Шмитта показана на рис. 8.
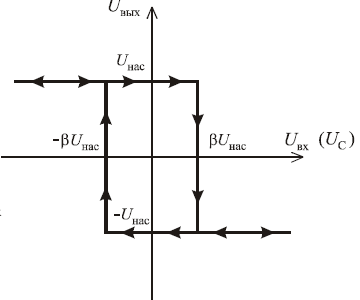
Рисунок 8 – Передаточная характеристика триггера Шмитта
Рассмотрим работу мультивибратора, предположив, что в момент t = 0
напряжение на выходе схемы Uвых = +Uнас , а напряжение конденсатора
![]() .
.
Напряжение
![]() изменяется по закону
изменяется по закону
![]()
Постоянная
времени
![]() .
.
В момент t1 напряжение uC (t) достигает величины - Uнас , ОУ переключается в состояние отрицательного насыщения.
Выходное напряжение скачком принимает значение, равное –Uнас. Начинается перезарядка конденсатора. Напряжение uC (t) изменяется по закону
![]()
В момент t2 напряжение uC (t) становится равным - Uнас и ОУ переключается в состояние положительного насыщения. Далее процесс периодически повторяется. Временные диаграммы напряжений uC (t) и uвых (t) показаны на рис. 9.
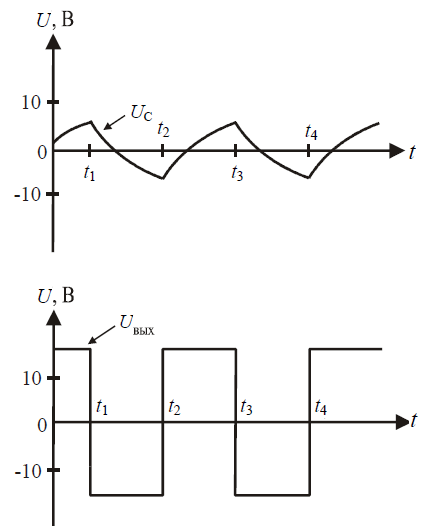
Рисунок 9 – Временные диаграммы напряжений uC (t) и uвых (t)
На выходе мультивибратора наблюдаются прямоугольные импульсы амплитудой ±Uнас. Период повторения импульсов T = 2R3Cln [1+ (2R1/ R2 )].
При
R1 = R2 период колебаний T
 2.2R3C .
2.2R3C .
Положительные
и отрицательные импульсы различной
длительности можно получить в
несимметричном мультивибраторе,
показанном на рис. 10. Перезарядка
конденсатора во время формирования
положительных и отрицательных импульсов
осуществляется через различные резисторы.
Когда напряжение на выходе ОУ положительно,
открыт диод VD1 и перезарядка происходит
с постоянной времени
 = R3C . Когда напряжение на
выходе ОУ отрицательно, открыт диод VD2
и постоянная времени
= R3C . Когда напряжение на
выходе ОУ отрицательно, открыт диод VD2
и постоянная времени
 = R4C .
= R4C .
Изменяя сопротивления резисторов R3 и R4 , мы можем менять длительность
положительных и отрицательных импульсов.
51. Генераторы прямоугольных импульсов на специализированных ИС.
. Генераторы прямоугольных импульсов на специализированных ИС
Помимо операционных усилителей для реализации генераторов прямоугольных импульсов используют специализированные микросхемы – таймеры. Таймерами называют устройства, предназначенные для получения точных интервалов времени. Такие устройства реализуют в настоящее время, как на биполярных, так и на МОП-транзисторах. Упрощенная схема таймера КР1006ВИ1 (зарубежный аналог – NE555) показана на рис. 10. Цепь на рис. 10 содержит два компаратора, RS-триггер, транзистор VT, работающий в ключевом режиме.
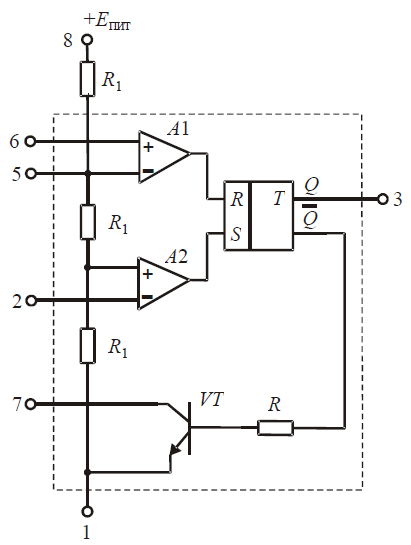
Рисунок 10 – Упрощенная схема таймера КР1006ВИ1 (зарубежный аналог – NE555)
Делитель напряжения, образованный тремя одинаковыми резисторами, формирует опорные напряжения для компараторов.
Микросхема таймера имеет восемь выводов. Цифрами на рис. 10 обозначены: 1 – общий; 5 – порог;
2 – вход 2; 6 – вход 1;
3 – выход; 7 – разряд.
Напряжение питания может изменяться в широких пределах (от 4.5 до 16 В). Пороговое напряжение компаратора А1 U01 = 2 /3 Eпит. Пороговое напряжение второго компаратора U02 = 1 /3 Eпит
Неинвертирующий вход компаратора А1 является пороговым входом таймера. На инвертирующий вход компаратора А2 подается сигнал, управляющий запуском RS-триггера. Схема мультивибратора на основе таймера показана на рис. 11.
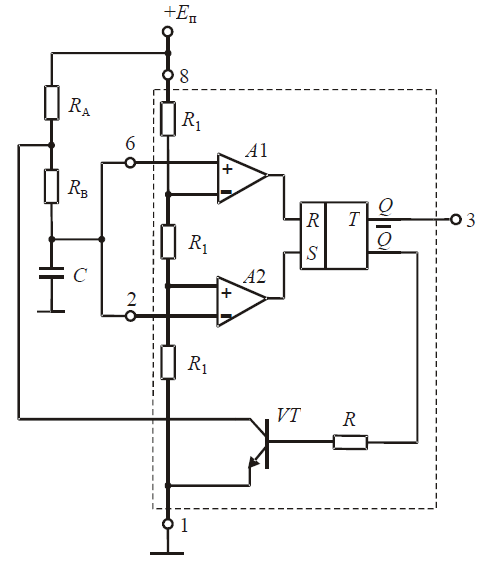
Рисунок 11 – Схема мультивибратора на основе таймера
Конденсатор С заряжается через цепочку RA , RB до напряжения, равного U01 = 2/3 Eпит. В этот момент срабатывает компаратор А1 и RS-триггер переводит транзистор VT в режим насыщения. Конденсатор разряжается через резистор Rв . Когда напряжение конденсатора достигает значения 1/3 Eпит, компаратор А2 переключает триггер и транзистор переходит в режим отсечки. Конденсатор вновь начинает заряжаться. Таким образом, таймер в схеме на рис. 11 используется как ключ, управляемый напряжением. Процессы заряда и разряда конденсатора периодически повторяются. При этом на выходе формируются импульсы с временными интервалами t1 0.69(RA + RB )C и t2 0.69RBC. Период повторения импульсов T 0.69(RA + 2RB )C . Временные диаграммы напряжений u С(t) и uвых (t) показаны на рис. 12.
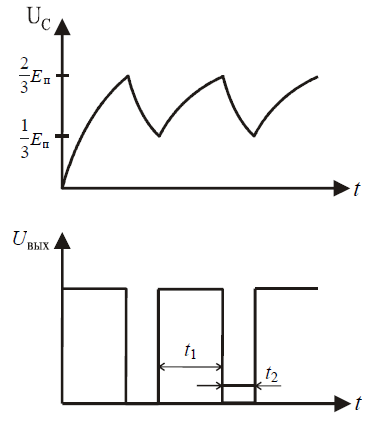
Рисунок 12 – Временные диаграммы напряжений u С(t) и uвых (t)
Величину S = T/ t1 называют скважностью импульсной последовательности. Скважность импульсов на выходе рассматриваемого мультивибратора

Из последнего равенства следует, что скважность импульсов, генерируемых схемой на рис. 12, не превышает двух.
Мультивибраторы на основе интегральных таймеров обеспечивают высокую стабильность частоты повторения импульсов. Это объясняется тем, что длительность временных интервалов задает внешняя цепь С – RA – RB , параметры которой не зависят от напряжения источника питания и слабо зависят от температуры. На основе интегральных таймеров можно реализовать и другие устройства, например, ждущие мультивибраторы, преобразователи напряжение – частота.
Выводы
1. Периодические колебания, наблюдаемые в генераторе, обусловлены не внешними воздействиями, а свойствами устройства. Такие колебания, возникающие самостоятельно, в отсутствие внешних воздействий, называют автоколебаниями.
2. Генераторы гармонических колебаний классифицируют по виду используемых частотно-избирательных цепей.
3. Для получения колебаний низких частот (менее 10 кГц) используют RC-генераторы. В качестве цепей обратной связи применяют многозвенные RC-цепи, мост Вина – Робинсона.
4. Генераторы, предназначенные для получения колебаний прямоугольной формы, называют мультивибраторами.