

Центр тяжести судна с отклоненным рулем перемещается на траектории, которая называется циркуляцией. При этом различают три ее этапа:
Маневренный – период, совпадающий с продолжительностью от команды до окончания перекладки руля;
Эволюционный - период после перекладки руля до момента устанавливающего движения судна;
Собственно циркуляция до тех пор пока руль остается отклоненным.
Д и а м е т р у с т а н о в и в ш е й с я ц и р к у л я ц и и (Дц) – это диаметр окружности, которую описывает центр тяжести судна в установившийся период. Обычно он измеряется в длинах корпуса судна.
Д иаметр
циркуляции зависит от угла перекладки
руля (р).
Эту зависимость можно представить на
графике (рис.3.3. ).
иаметр
циркуляции зависит от угла перекладки
руля (р).
Эту зависимость можно представить на
графике (рис.3.3. ).
Каждая кривая на графике соответствует определенной скорости. Как видно из графика, скорость влияет на изменение Д незначительно.
о б р а т н о е с м е щ е н и е (ℓ3) имеет место в маневренный период и определяет наибольшее расстояние, на которое удаляется центр тяжести судна по нормали от первоначального курса в сторону, обратную повороту. Величина ℓ3 не превышает половины ширины судна. Несмотря на незначительную величину ℓ3, ее необходимо учитывать при проведении маневра «координат» в целях уклонения от препятствия, внезапно обнаруженного прямо по курсу на малых дистанциях. При этом первый поворот необходимо делать на ветер с расчетом компенсировать обратное смещение ветровым давлением на корпус, а за счет второго поворота, в обратную сторону, отвести корму судна на максимальное расстояние от препятствия под ветер.
П р я м о е с м е щ е н и е (ℓ2) – расстояние по перпендикуляру к направлению прямого курса, на которое сместился в сторону циркуляции центр тяжести судна к моменту его поворота на 900. Величина прямого смещения колеблется в пределах 0,250,5 Дц.
В
ы д в и г (ℓ1)
– расстояние, проходимое центром тяжести
судна в направлении прямого курса от
момента начала перекладки руля до
поворота судна на 900.
Величина выдвига лежит в пределах
0,61,2
Дц.
Точное звание величины выдвига для
данного судна позволит правильно
определить время начала поворота. кроме
того, капитану необходимо учитывать
влияние внешних факторов, которые могут
значительно изменять величину выдвига.
Особенно необходимо учитывать изменение
величины выдвига при плавании на течении
в стесненных условиях. При плавании по
течению выдвиг в метрах будет увеличен
на
 ,
где Vт
– скорость течения; tп
– время поворота, с.
,
где Vт
– скорость течения; tп
– время поворота, с.
Н овая
величина выдвига на течении будет
овая
величина выдвига на течении будет
 где ℓ3
- величина выдвига при отсутствии влияния
внешних факторов.
где ℓ3
- величина выдвига при отсутствии влияния
внешних факторов.
При
плавании в этих же условиях против
течения выдвиг уменьшится на
 и
и

Т а к т и ч е с к и й д и а м е т р ц и р к у л я ц и и судна (Дт) – кратчайшее расстояние между положением диаметральной плоскости судна на прямом и обратном курсах. Величина Дц для различных судов лежит в пределах 0,91,2 Д.
П е р и о д ц и р к у л я ц и и (t360) – время, за которое судно совершит поворот на 3600; величина периода циркуляции зависит от геометрических характеристик судна, скорости его хода и угла перекладки руля. Период циркуляции в секундах можно подсчитать по формуле
 где
Rц
– радиус окружности, описываемой центром
тяжести судна на установившейся
циркуляции, м;
где
Rц
– радиус окружности, описываемой центром
тяжести судна на установившейся
циркуляции, м;
V – скорость судна на циркуляции, м/с.
На основании проведения многочисленных ходовых испытаний были получены формулы для расчетов элементов циркуляции.
Они дают достаточно близкие к экспериментальным данным результаты.
 (3.4)
(3.4) (3.5.)
(3.5.)
 (3.6)
(3.6) (3.7.)
(3.7.)
 где
-
фактор корпуса и руля;
где
-
фактор корпуса и руля;
0 – угол дифферента судна в градусах. При дифференте на нос угол имеет знак минус;
 (3.8.) 0
– угол
перекладки руля в градусах.
(3.8.) 0
– угол
перекладки руля в градусах.
Величина SP, h и f приведены в таблице. … ну там она где-то есть)) я её удалил)
Фактор корпуса и руля представляет собой комбинацию характеристик судна, влияющих на поворотливость судна, и определяется выражением:
 (3.9)
где к
– коэффициент полноты диаметральной
плоскости судна, рассчитываемой по
площади подреза кормы; Sp%
- относительная площадь поворотной
части руля, выраженная в процентах от
площади погруженной части диаметральной
плоскости, определяемой произведением
длины судна на среднюю осадку (LTср);
(3.9)
где к
– коэффициент полноты диаметральной
плоскости судна, рассчитываемой по
площади подреза кормы; Sp%
- относительная площадь поворотной
части руля, выраженная в процентах от
площади погруженной части диаметральной
плоскости, определяемой произведением
длины судна на среднюю осадку (LTср);
-относительное удлинение руля. Коэффициент к определяется выражением:
 где
f-площадь
кормового выреза, ограниченного кормовым
перпендикуляром, базовой линией и
контуром кормы (включая кронштейн
полуподвесного руля);
где
f-площадь
кормового выреза, ограниченного кормовым
перпендикуляром, базовой линией и
контуром кормы (включая кронштейн
полуподвесного руля);
Относительное удлинение руля p рассчитывается по формуле:
 (3.11)где
hP
– высота руля по баллеру, м; SP
– площадь пера руля (без кронштейна),
м2.
(3.11)где
hP
– высота руля по баллеру, м; SP
– площадь пера руля (без кронштейна),
м2.
Относительная площадь пера руля выражается следующим образом:
 (3.12)
(3.12)
Расчетные
значения элементов циркуляции:
 и Дт
– отягощены неизбежными систематическими
погрешностями, возникающими вследствие
неучета ряда факторов, определяющих
поворотливость конкретного судна.
Поэтому необходимо выполнить
экспериментальные определения элементов
циркуляции. Обычно это выполняется
только при какой либо посадке судна.
Выполнив натуральные испытания,
необходимо сопоставить результаты
эксперимента и расчета для получения
переходных коэффициентов.
и Дт
– отягощены неизбежными систематическими
погрешностями, возникающими вследствие
неучета ряда факторов, определяющих
поворотливость конкретного судна.
Поэтому необходимо выполнить
экспериментальные определения элементов
циркуляции. Обычно это выполняется
только при какой либо посадке судна.
Выполнив натуральные испытания,
необходимо сопоставить результаты
эксперимента и расчета для получения
переходных коэффициентов.
 ;
;
 ;
;
 Пользуясь полученными переходными
коэффициентами, можно определить
экспериментально-расчетные значения
элементов циркуляций для стационарных
состояний судна в балласте и грузу. Для
этого необходимо по формулам 3.43.6
расчетные значения элементов, а затем
умножить на соответствующие переходные
коэффициенты. При экспериментальном
обнаружении существенной несимметричности
элементов правых и левых циркуляций
переходные коэффициенты рассчитываются
раздельно для сторон поворота.
Пользуясь полученными переходными
коэффициентами, можно определить
экспериментально-расчетные значения
элементов циркуляций для стационарных
состояний судна в балласте и грузу. Для
этого необходимо по формулам 3.43.6
расчетные значения элементов, а затем
умножить на соответствующие переходные
коэффициенты. При экспериментальном
обнаружении существенной несимметричности
элементов правых и левых циркуляций
переходные коэффициенты рассчитываются
раздельно для сторон поворота.
10.Определение инерционно-тормозных характеристик и их использование.
14.Определение элементов разгона и торможения.
1. Определение коэффициентов сопротивления и активного торможения.
Коэффициент сопротивления К (кг/м) может быть получен расчетным путем со стандартной погрешностью около (9,4%) по формуле (3.50)
Площадь смоченной поверхности определяется по формуле (3.51) с учетом водоизмещения судна при экспериментальных измерениях.

где ∆Т – водоизмещение судна т.
Точность определения коэффициента сопротивления значительно повышается при использовании экспериментально-расчетного метода. Для этого на глубокой воде выполняется реверс ПХПм - стоп. После выполнения команды замечают по лагу начальную скорость судна и одновременно пускают секундомер. После снижения скорости вдвое и больше замечают ее значение V и останавливают секундомер. Таким образом, экспериментально определяется Vн, V, и t, а коэффициент К рассчитывается по преобразованной формуле (5.38)
 (4.39)
(4.39)
Значение К может быть определено с использованием УД по схеме
а =0→V/Vн→(∆/К)←Vнt.
Экспериментальное значение Кэ
получит по формуле m=Dэ
1,1.
=0→V/Vн→(∆/К)←Vнt.
Экспериментальное значение Кэ
получит по формуле m=Dэ
1,1.
Расчетное значение коэффициента сопротивления отягчено неизвестной погрешностью, возникающей вследствие неучета ряда факторов, определяющих форму и фактическое состояние корпуса судна. Относительное значение этой погрешности может быть получено в результате сравнения значений К из эксперимента и расчетным путем:
В дальней
дальней будем называть переходным коэффициентом,
позволяющим рассчитывать значение Кэ
для нового водоизмещения и осадки,
компенсируя указанную систематическую
погрешность:
будем называть переходным коэффициентом,
позволяющим рассчитывать значение Кэ
для нового водоизмещения и осадки,
компенсируя указанную систематическую
погрешность:

-где К'расч. расчетное значение коэффициента сопротивления для нового значения водоизмещения и осадки.
- Максимальная
сила упора на заднем ходу (в момент
остановки судна) может быть рассчитана
с использованием выражения:
Максимальная
сила упора на заднем ходу (в момент
остановки судна) может быть рассчитана
с использованием выражения:
-гдe Pшв сила упора изолированного винта на швартовых;
- Суу-
коэффициент влияния корпуса (коэффициент
усиления упора). Для расчета значений
Pшв
и Суу
применяются формулы:
Суу-
коэффициент влияния корпуса (коэффициент
усиления упора). Для расчета значений
Pшв
и Суу
применяются формулы:
где: ρ – массовая плотность воды (1020 кг/м3;
n – частота вращения винта, (сб/с);
– частота вращения винта, (сб/с);
Dв – диаметр винта, м;
Ө - дисковое отношение винта;
Z – число лопастей;
Н/Dв – шаговое отношение винта, рад;
Sχ – площадь погруженной части мидель -шпангоута при эксперименте, м2;
А – площадь диска винта (А=nD2/4), м2
Повышение точности расчетов Pmax достигается выполнением эксперимента активного торможения с полного переднего маневренного хода (ПХПМ) или СХМ на ПХЗ. В момент реверсирования двигателя («0» по тахометру) замечают начальную скорость активного торможения V3н и пускают секундомер. Руль ставят в положение «прямо». Замечают и записывают частоту вращения винта , развиваемую двигателем на заднем ходу. В момент остановки судна относительно воды останавливают секундомер. Таким образом получают значение времени t0.0 в течение которого судно тормозится от начальной скорости V2н до полной остановки при частоте вращения винта .
 Коэффициент
активного торможения
а получают
при помощи универсальной диаграммы по
схеме: VнtD/kV/Vн=0а,
после чего рассчитывают экспериментальное
значение силы упора.
Коэффициент
активного торможения
а получают
при помощи универсальной диаграммы по
схеме: VнtD/kV/Vн=0а,
после чего рассчитывают экспериментальное
значение силы упора.
 Максимальная
сила упора на заднем ходу Pрасчmax
рассчитанная
по формуле (3.66), также не учитывает ряд
факторов, связанных с воздействием
корпуса и винта судна. Экспериментальное
определение PЭmax
значительно
повышает оценку этой силы. Относительное
значение неучтенной систематической
погрешности определяется переходным
коэффициентом P=PЭmaxPрасчmax,
который в дальнейшем используется при
расчете Pmax
для любой частоты вращения винта и
осадки. При этом точность расчетного
метода повышается и величина силы упора
называется экспериментально-расчетной:
Максимальная
сила упора на заднем ходу Pрасчmax
рассчитанная
по формуле (3.66), также не учитывает ряд
факторов, связанных с воздействием
корпуса и винта судна. Экспериментальное
определение PЭmax
значительно
повышает оценку этой силы. Относительное
значение неучтенной систематической
погрешности определяется переходным
коэффициентом P=PЭmaxPрасчmax,
который в дальнейшем используется при
расчете Pmax
для любой частоты вращения винта и
осадки. При этом точность расчетного
метода повышается и величина силы упора
называется экспериментально-расчетной:
Для построения линейных графиков (правая половина рис. 4.4 ) необходимо, задавшись удобным масштабом, построить центральную ось тормозных путей, официального через 1 кбт. Параллельно этой оси строят линейные графики инерционно-тормозных характеристик - слева для судна в грузу, справа для судна в балласте с использованием кривых, показанных на рис. 4.4. Для этого задаваясь значением . t через 1 мин. снимают с графика величины S, V. От точки на центральной оси, соответствующей значением S проводят горизонтальную линию до пересечения с осью линейного графика и делают отметку: слева 2 мин. справа значение V(2 мин.) и т.д. Последняя отметка будет соответствовать моменту снижения скорости до 0.2 Vн.
Для построения линейных графиков активного торможения по формулам (4.40-4.44) рассчитывают значение PЭРmax для судна в грузу и в балласте, а затем определяют коэффициент активного торможения, а для значений судна V3н при ПХП, ПХПм, СХП, МХП, СМХП. При этом учитывается падение скорости во второй период (пассивного торможения) при помощи графика V=f(t), показанного на рис. 4.4.
Учет маневренных характеристик при различных условиях плавания
При использовании якорей в процессе маневрирования необходимо учитывать:
- использование якорей повышает маневренность судна при швартовке;
- использование якоря облегчает отход от причала при приниженном ветре;
- использование якоря улучшает тормозные характеристики при маневрировании на малых глубинах.
Для учета действия якоря на инерционные характеристики судна рассчитывают дополнительный коэффициент активного торможения за счет держащей силы якоря.
G – вес якоря, кг
g = 9.81 м/с2
к2 - коэффициент держащей силы якоря (из таблицы)
k1 - коэффициент упора винта
Таблица
-
Якорь
Грунт
Ил
Песок
Камни
Адмиралтейский
2.2
3.0
3.1
Холла
2.2
1.5
2.8
Матросова
11.5
8.8
-
При
расчете времени и пути торможения во
все расчетные формулы к обычному значению
коэффициента торможения
 добавляется значение ая
и расчеты ведутся до полной остановки
судна.
добавляется значение ая
и расчеты ведутся до полной остановки
судна.
Естественно, при пассивном торможении -а = 0. С помощью якоря получают активное торможение с коэффициентом- ая . Такой маневр с якорем требует обязательной предварительной оценки ситуации с последующими расчетами или использовании УДТ.
При использовании якоря следует учитывать, что потеря якоря приводит к потере мореходности судна, т.е. является аварией.
В случае необходимости оставить якорь на грунте необходимо обозначить его место с помощью том – буя, закрепив его конец к одному из звеньев якорной цепи.
Компетенция судоводителей по управлению судном предусматривает определенные требования кодекса ПДНВ 78/95 [12]. Функции судовождения на уровне эксплуатации приведены в таблице А-II/1 [12]. По маневрированию судна они предусматривают, что судоводитель должен знать:
- влияние водоизмещения, осадки, дифферента, скорости и запаса воды под килем на циркуляции и тормозной путь судна;
- влияние ветра и течения на управление судном;
- маневр по спасению человека упавшего за борт;
- увеличение осадки судна на мелководье;
- надлежащие процедуры при постановке на якорь и швартовке.
На уровне управления таблица ПДМНВ А-II/2 [12] по функциям судоводителей спецификацию минимальных требований к компетенции старших помощников и капитанов. При этом по управлению судном в любых ситуациях (условиях) требуется знание, понимание и профессионализм по вопросам:
- маневрирование при приближении к лоцманской станции;
- управление судном в стесненных водах;
- использование техники поворота с постоянной угловой скоростью;
- маневрирование на мелководье;
- явление присасывания;
- швартовка в любых условиях;
- взаимодействие судна и буксира при буксировках;
- использование СЭУ;
- выбор якорной стоянки, очистка якоря;
- постановка в док;
- управление судном в шторм;
- спуск шлюпок;
- способ подъема на судно шлюпок и плотов;
- умение определять маневренные характеристики судна с учетом тормозных путей и т.д.;
- важность плавания с умеренной скоростью для избежания повреждения корпуса волнами;
- практические меры при плавании во льдах;
- использование СУДС (система управления движением судов).
При экстренном торможении необходимо использовать маневр для прекращения движения судна в прежнем направлении. Такие ситуации возникают при обнаружении опасности впереди судна: подводная банка или затонувшее судно с буями, неверный маневр встречного судна и т.д.
Выбор маневра зависит от характера опасности, навигационной обстановки (глубины, препятствия, ветер и т.д.), а также от характера движения и маневренных качеств своего судна. При этом времени для расчета нет, и надо заранее знать достоинства и недостатки различных маневров, чтобы выбрать лучший для данной ситуации.
На практике возможны следующие маневры:
1.Поворот судна путем перекладки руля на борт и циркуляция с характерными элементами.
Н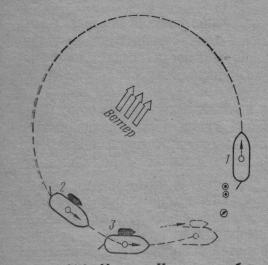 адо
учитывать величину выдвига и возможное
уменьшение скорости на 20- 20%. Сильно
влияет начальная скорость, груз и
балласт. Достоинства: контроль над
судном весь маневр. Недостаток: большое
поперечное смещение.
адо
учитывать величину выдвига и возможное
уменьшение скорости на 20- 20%. Сильно
влияет начальная скорость, груз и
балласт. Достоинства: контроль над
судном весь маневр. Недостаток: большое
поперечное смещение.
Рис.4.5 Поворот судна путем перекладки руля на борт и циркуляция с характерными элементами
2.Экстренное торможение полным ходом назад
Реверс главного двигателя требует учета затяжки времени начала торможения. Необходимо учитывать, что в грузу тормозной путь на 50% больше, чем в балласте.
Достоинство: возможна полная остановка судна.
Недостаток: потеря управляемости во время маневра.
3.Торможение рулем с последовательными перекладками руля с борта на борт. Базируется на том, что после перекладки руля на борт при неизменном режиме судна теряют скорость быстрее (особенно крупнотоннажные), чем после реверса.
С учетом этого для крупнотоннажных судов разработан маневр со ступенчатым изменением хода согласно схеме:
Рис. 4.5 Маневр ступенчатого уменьшения хода.
С уменьшением водоизмещения эффективность
перекладок руля уменьшается.
уменьшением водоизмещения эффективность
перекладок руля уменьшается.
4. Маневр коорданат.
Получают перекладкой руля на борт и после поворота судна на 600 перекладывают руль на противоположный борт и выходят на первоначальный курс.
Рис. 4.6 Маневр коорданат.
Достоинство: за небольшое время на малом пространстве позволяет снести судно и уйти от опасности.
Маневр выполняют при обнаружении опасности, перекладывают руль где меньше опасности и выводят на траверз опасность. Затем обратная перекладка руля.
Факторы, влияющие на управляемость судна.
Их делят на две группы:
Факторы, обусловленные конструктивными особенностями судна и его положением относительно воды.
- главные размерения и их соотношения;
- формы обводов подводной части и
выступающих элементов;
формы обводов подводной части и
выступающих элементов;
- виды надстроек и архитектура судна;
- крен и дифферент;
- изменение осадок;
- скорость судна.
2. Внешние факторы:
- направление и сила ветра;
- ограничения глубины и характер ее изменения;
- ограничения акватории;
- наличие и характер льда.
При L/B =5- 7 судно легко управляется, но менее устойчиво на курсе; L/B = 8 -11 – устойчиво на курсе, но плохо управляется.
Округлая форма улучшает поворотливость, а выступающие части ниже WL ухудшает управляемость.
Небольшая осадка и «тупые» обводы улучшают управляемость. Высокие борта и большие надстройки ухудшают управляемость, в свежую погоду и на волнении.
Все эти факторы сильно влияют на управляемость, их надо учитывать применительно к конкретным условиям.
Наиболее большое влияние имеет положение ЦП и ЦБС. Их взаимное положение меняют дифферентовкой судна, уменьшая рыскливость, наветренность или увальчивость. Лучше всего – положение ЦП и ЦБС на одной вертикали.
При крене встречный поток воды на скулах различный, т.е. больше на пониженном борту и судно уклоняется в сторону пониженного борта. т. о. поворот в сторону пониженного борта легче с уменьшением D цирк..
Разные давления на обводы при качке судна увеличивают рыскливость, особенно, волнении в раковину. Это справедливо для одновинтовых судов.
Df не зависимо от знака ухудшает обтекаемость подводной части корпуса и существенно влияет на управляемость.
Увеличение dкорм. ухудшает поворотливость и создает большую рыскливость при движении на волну.
Df на нос уменьшает скорость. Равномерное увеличение осадок увеличивает водоизмещение, приводит к увеличении реакции на перекладку руля при малых скоростях, дает большую устойчивость на курсе.
Ветер вызывает дрейф тем больше, чем меньше скорость судна и чем развитие надстройки.
Ветер на КУ более 1300 вызывает дрейф и крен судна.
11.Маневрирование при пассивном торможении.
П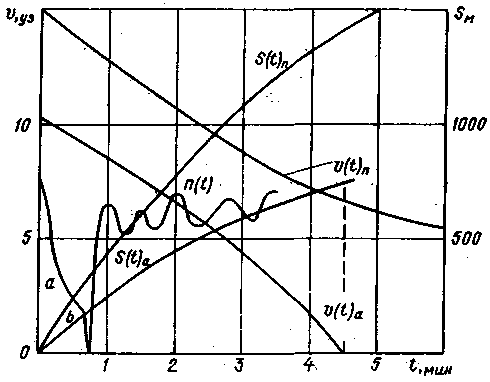 ри
торможении
необходимо погасить не только кинетическую
энергию, накопленную судном, но и энергию
вовлеченных в движение частиц воды,
на что также потребуется более длительная
работа силовой установки.
Такое взаимодействие частиц воды с
корпусом аналогично увеличению массы
судна. Эту добавочную массу называют
присоединенной массой. На глубокой воде
и при чистом корпусе присоединенная
масса у транспортных судов составляет
примерно в
грузу 4%, в балласте — 3%.
ри
торможении
необходимо погасить не только кинетическую
энергию, накопленную судном, но и энергию
вовлеченных в движение частиц воды,
на что также потребуется более длительная
работа силовой установки.
Такое взаимодействие частиц воды с
корпусом аналогично увеличению массы
судна. Эту добавочную массу называют
присоединенной массой. На глубокой воде
и при чистом корпусе присоединенная
масса у транспортных судов составляет
примерно в
грузу 4%, в балласте — 3%.
Инерционные свойства судов учитываются с помощью инерционных характеристик, представляющих закономерности изменения скорости и пути во времени при разгоне и остановке судна. Протяженность и крутизна кривых v(t), S(t), помимо массы, зависят еще от начальной скорости, состояния корпуса, мощности и реверсивных качеств комплекса корпус—движитель. Безопасное маневрирование судов связано прежде всего с их тормозными характеристиками. Торможение может быть пассивным и активным. При пассивном торможении остановка судна происходит за счет сопротивления среды, при активном судно дополнительно тормозится paботой винта на задний ход. Путь, проходимый судном при пассивном торможении, называют выбегом, а при активном торможении — тормозным путем
12.Документальное предоставление информации о маневренных элементах.
Резолюция ИМО А.601 введена в действие с 19 ноября 1987 года, называется «обеспечение объективной информации о маневренных характеристиках судна», вместе с постановлением комитета по безопасности мореплавания ИМО под названием «Рекомендации по информации о маневренных характеристиках судов и ее представлению на судах» определяют следующие требования. На судне обязательно должен быть:
Лоцманская карточка;
Таблица маневренных характеристик для рулевой рубки;
Формуляр маневренных характеристик. Требования в отношении лоцманской карточки распространяются на все суда. Остальные документы обязательно на судах L>100м и на судах любых размеров перевозящих опасные грузы.
Лоцманская карточка должна быть новой и содержать следующую информацию:
1. особенности судна (характеристики судна) и дополнительно характеристики главного двигателя;
Раздел управляемости судна на тихой воде (маневренность, поворотливость);
Инерционно тормозные характеристики на глубинной воде, включающие в себя тормозные характеристики, характеристики замедления и характеристики разгона;
Маневренные характеристики на мелководье (проседание, циркуляция);
Влияние ветра на управляемость (силы и моменты, дрейф судна без хода, влияние ветра);
Маневренные характеристики на малых скоростях.
Согласно Резолюции ИМО №А-209 от 12.10.71 и №285 от 20.11.73г на каждом судне необходимо иметь информацию о маневренных элементах судна.
Маневренные элементы судна первоначально определяются при заводских и натурных испытания для двух водоизмещений – судна с полным грузом и порожнем. На основе выполненных испытаний и дополнительных расчетов составляют информацию о маневренных элементах судна (рис.66). Информация состоит из двух частей: таблицы маневренных элементов, вывешиваемой на ходовом мостике; дополнительной информации, учитывающую специфику данного судна и динамику влияния различных факторов на маневренные качества судна при различных обстоятельствах плавания.
Для определения маневренных элементов могут использоваться любые натурные и натурно-расчетные методы, обеспечивающие точность конечных результатов в пределах ±10% измеряемой величины. Натурные испытания проводят при благоприятных погодных условиях: ветре до 4 баллов, волнении до 3 баллов, достаточной глубине и без заметного течения.
Таблица маневренных элементов включает в себя инерционные характеристики судна, элементы поворотливости, изменение осадки судна, элементы ходкости, элементы маневра для спасения человека, упавшего за борт.
инерционные характеристики представляют в виде линейных: графиков, построенных в постоянном масштабе расстояний и имеющих шкалу значений времени и скорости. Тормозной путь с передних ходов на «Стоп» ограничивают моментом потери управляемости судна или конечной скоростью, равной 20% исходной. На графиках показывают стрелкой наиболее вероятную сторону отклонения судна от начального пути в процессе снижения скорости.
Информация о поворотливости приводится в виде графика и таблицы. График циркуляции отражает положение судна через 300 на траекторию вправо и влево с положением руля «на борт» и «на полборта». Аналогичная информация представляется в табличной форме, но через каждые 10° изменения начального курса в диапазоне 0—90°, на каждые 30° — в диапазоне 90—180°, на каждые 90°—в диапазоне 180—360°. В нижней части таблицы помещают данные о наибольшем диаметре циркуляции.
Элементы ходкости отражают в виде графической зависимости скорости судна от частоты вращения гребного винта и дополняют таблицей, где на каждое значение постоянной скорости указана частота вращения гребного винта.
Увеличение осадки судна учитывается при крене и проседании, когда судно движется на ограниченной глубине с определенной скоростью.
Элементы маневра для спасения человека, упавшего за борт, выполняют наиболее приемлемым способом для данного судна. В информации указывают следующие данные для выполнения правильного маневра: угол отворота от начального курса; оперативное время перекладки руля на противоположный борт, выхода на контркурс и в точку начала маневра; действия судоводителя на каждом этапе эволюции.
Все расстояния в информации о маневренных элементах приводят в кабельтовах, время — в минутах, скорость — в узлах.
Дополнительная информация может включать в себя материалы, учитывающие специфические особенности конкретных типов судов, сведения о влиянии различных факторов на маневренные данные судна и др.
Информация капитану по управлению судном может составляться на основе опыта работы на данном судне и состоит из двух частей: часть первая — управление судном, часть вторая — особые случаи мореплавания. В первую часть могут включаться следующие сведения: информация о маневренных элементах судна; выполнение маневра по спасению человека, упавшего за борт; управление судном в узкости и канале; выбор курса и скорости при шторме; определение необходимой длины якорной цепи при постановке на якорь; управление судном во льдах; особенности стоянки на швартовах; выполнение маневра последнего момента и др.
Во второй части помещают сведения по особым случаям морской практики: порядок расчетов при буксировочных операциях; снятие с мели; управление аварийным судном; управление спасательной шлюпкой; оставление судна и др.
Информации такого порядка должны предшествовать общие рекомендации судоводителю по управлению судном, основанные на своевременных, уверенных действиях и хорошей морской практике.
13.Определение элементов поворотливости.
П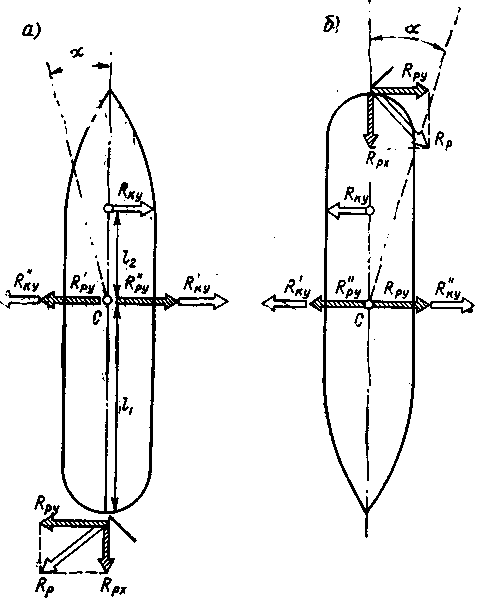 оворотливость
есть способность судна изменять
направление движения под влиянием
переложенного руля. При равномерном и
прямолинейном движении в условиях
отсутствия ветра и волнения на судно
действуют две, расположенные в
диаметральной плоскости и направленные
навстречу друг другу, силы: равнодействующая
тяги движителей, приложенная в центре
тяжести судна, и равнодействующая сил
сопротивления, приложенная в центре
сил сопротивления. Положение центра
сил сопротивления не является постоянным.
На прямом курсе центр сил сопротивления
располагается вблизи центра тяжести,
как правило, немного позади него, чем
достигается оптимальная управляемость
судна. Если руль переложить на некоторый
угол γ
в
сторону, например, правого борта, то на
нем возникнет гидродинамическая сила
оворотливость
есть способность судна изменять
направление движения под влиянием
переложенного руля. При равномерном и
прямолинейном движении в условиях
отсутствия ветра и волнения на судно
действуют две, расположенные в
диаметральной плоскости и направленные
навстречу друг другу, силы: равнодействующая
тяги движителей, приложенная в центре
тяжести судна, и равнодействующая сил
сопротивления, приложенная в центре
сил сопротивления. Положение центра
сил сопротивления не является постоянным.
На прямом курсе центр сил сопротивления
располагается вблизи центра тяжести,
как правило, немного позади него, чем
достигается оптимальная управляемость
судна. Если руль переложить на некоторый
угол γ
в
сторону, например, правого борта, то на
нем возникнет гидродинамическая сила
 (рис. 2.1), которую можно разложить на две
составляющие: про дольную Rpx
увеличивающую сопротивление
движению,
и поперечную силу Rpy.
Чтобы выяснить характер действия силы
Rpy,
приложим в центре тяжести две равные и
противоположно направленные силы
(рис. 2.1), которую можно разложить на две
составляющие: про дольную Rpx
увеличивающую сопротивление
движению,
и поперечную силу Rpy.
Чтобы выяснить характер действия силы
Rpy,
приложим в центре тяжести две равные и
противоположно направленные силы
 и
и
 .
Сила
Rpy
вызовет боковое смещение судна, пара
сил
Rpy,
— поворот судна вокруг оси, проходящей
через его центр тяжести. Как только
начнется вращение судна и корпус будет
двигаться по отношению к набегающему
потоку с углом дрейфа α, центр сил
сопротивления переместится в нос от
центра тяжести, а равнодействующая
гидродинамических сил Rк
станет
направленной под углом к диаметральной
плоскости. Действие поперечной
составляющей
.
Сила
Rpy
вызовет боковое смещение судна, пара
сил
Rpy,
— поворот судна вокруг оси, проходящей
через его центр тяжести. Как только
начнется вращение судна и корпус будет
двигаться по отношению к набегающему
потоку с углом дрейфа α, центр сил
сопротивления переместится в нос от
центра тяжести, а равнодействующая
гидродинамических сил Rк
станет
направленной под углом к диаметральной
плоскости. Действие поперечной
составляющей
 также
можно
рассматривать как действие силы
также
можно
рассматривать как действие силы
 и пары сил
,
и пары сил
,
 .
Сила
будет направлена противоположно силе
а
пара сил
,
создаст
дополнительный
момент вокруг центра тяжести, направленный
в сторону поворота.
Таким образом, при перекладке руля
поворот судна начнется
под действием суммарного момента
.
Сила
будет направлена противоположно силе
а
пара сил
,
создаст
дополнительный
момент вокруг центра тяжести, направленный
в сторону поворота.
Таким образом, при перекладке руля
поворот судна начнется
под действием суммарного момента

Из практики известно, что на заднем ходу управляемость судов хуже. Объясняется это двумя причинами: худшей обтекаемостью руля, так как при движении назад на руль не действует струя винтовой отработки, и тем, что в начале поворота момент гидродинамической силы на корпусе направлен в сторону, обратную кладке руля, т. е.
15.Средства улучшающие маневренные характеристики.
Все средства управления (СУ) подразделяются на две основные группы: главные средства управления (ГСУ) и вспомогательные средства управления (ВСУ).
Средства управления в каждой группе делятся по цели управления на два вида устройств:
Устройства, управляющие движением судна, а так же разгоном и торможением в продольной плоскости (вперед, назад);
Устройства, управляющие угловым движением судна, т.е. курсом и угловой скоростью.
Те устройства, которые способны создавать боковую силу, при неработающим главным двигателе (ГД), и при отсутствии хода судна относительно воды называются средствами активного управления (САУ).
С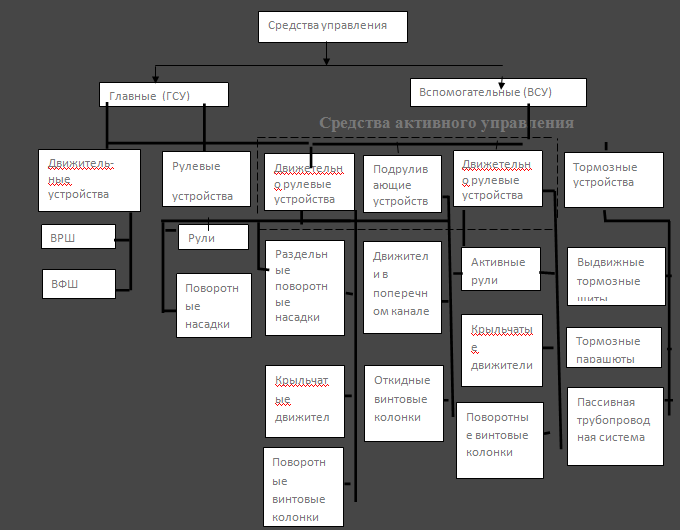 точки зрения управления судном для нас
главным образом представляют интерес
главные средства управления (ГСУ), а
конкретно движительные устройства и
рули
точки зрения управления судном для нас
главным образом представляют интерес
главные средства управления (ГСУ), а
конкретно движительные устройства и
рули
Движительные устройства.
На морских судах чаще всего используют виты фиксированного шага (ВФШ) или виты регулируемого шага (ВРШ).
Гребной винт (ВФШ) представляет собой систему лопастей (от 2 до 8), каждая из которых является участком винтовой поверхности. Поверхность лопастей, обращенная в нос, называется засасывающей,. Поверхность, обращенная в корму – нагнетающей. Передняя кромка лопастей называется входящей, задняя – выходящей. ВФШ бывают цельнолитые и со съемными лопастями. Они делятся на винты левого и правого вращения. Винт правого вращения на переднем ходу, если смотреть с кормы, вращается по часовой стрелке, винт левого вращения – наоборот.
Сила упора, создаваемая винтом при его вращении с заданной частотой, зависит от его основных геометрических характеристик,
DВ диаметр винта - диаметр окружности, описываемой наиболее удаленными точками лопастей (до 5 метров);
H геометрический шаг винта – линейное расстояние по оси винта, которое проходила бы ступица за один полный оборот при вращении в плотной среде. (величина шагового отношения H/D колеблется 0.8 – 1.8)
Θ дисковое отношение Θ= А/Аd - для тихоходных судов ≈0.35
Для быстроходных ≈ 1.2
А – суммарная площадь спрямленной поверхности всех лопастей винта;
Аd – площадь круга, ометаемого гребным винтом при его вращении.
Z число лопастей.
а так же от скорости самого судна.
Существенное влияние на силу упора винта оказывает взаимодействие винта с корпусом судна. Силу упора без учета такого взаимодействия называют упором изолированного винта. С учетом такого взаимодействия – полезным упором или тягой. Для ВФШ изменение направления упора достигается реверсированием двигателя. ВФШ имеет максимальный коэффициент полезного действия только при одном режиме движения (как правило, полный передний ход).
В отличии от гребных винтов фиксированного шага, винты регулиру-емого шага (ВРШ) имеют в ступице приводной механизм, с помощью которого осуществляется разворот лопастей от положения «ППХ» до положения «ПЗХ». Таким образом, без изменения направления вращения ГД, осуществляется изменение не только величины, но и направление упора винта. ВРШ могут быть трехлопастными и четырехлопастными. В последнем случае лопасти располагаются по парно и смещены вдоль оси винта (ВРШ типа «тендем»). Угол разворота лопастей при переходе с ППХ на ПЗХ составляет 40 – 500. Время разворота лопастей ВРШ составляет 10 – 15 сек.. Использование ВРШ позволяет получить полную мощность ГД на режимах, отличных от расчетных, обеспечивает увеличение скорости судна и экономичность работы его двигательной установки.. ВРШ развивает значительно большую тягу на малых ходах и на 40 – 50% сокращает время и длину тормозного пути. Установка ВРШ позволяет осуществлять дистанционное управление судном и использовать на реверсивные двигатели, что значительно повышает их моторесурс. К недостаткам ВРШ следует отнести сложность конструкции как самого винта, так и валопровода, их большую, по сравнению с ВФШ, чувствительность к ударным нагрузкам.
Рули и подруливающие устройства.
Судовой руль представляет собой крыло симметричного профиля. Как уже говорилось ранее, рули подразделяются: по способу соединения пера руля с корпусом судна на простые, полуподвесные и подвесные; по положению оси вращения относительно пера руля – не балансирные и балансирные. На управление судном оказывают значительное влияние геометрические характеристики пера руля:
SР – площадь пера руля. В общем случаи составляет 2% от подводной площади судна ( L*dСР)
λР – относительное удлинение руля. (
 ;
где hР
высота пера руля.
;
где hР
высота пера руля.δР – относительная толщина профиля поперечного сечения руля. δР= lР/bР где lР – наибольшая толщина профиля, bР – средняя ширина руля.
На одновинтовых судах устанавливается один руль, который располагается за винтом в диаметральной плоскости судна. Двухвинтовые и трех винтовые суда могут иметь один или два руля. В первом случае руль устанавливается в ДП, а во втором случае – симметрично за бортовыми винтами.
Положение руля относительно набегающего потока характеризуется углом перекладки руля aР и углом атаки a.
aР - - угол перекладки руля – называется угол поворота руля, измеренной в плоскости, перпендикулярной к оси баллера (до 350)
a – угол атаки руля – называется угол, образованный плоскостью симметрии руля и плоскостью, проходящей через ось баллера руля и совпадающей с направлением набегающего потока.
К подруливающим устройствам относятся:
поворотные насадки;
активный руль;
подруливающее устройство;
выдвижная движительно-рулевая колонка;
поворотная колонка.
Действия этих устройств разбирались в первой части курса.