

8 Переходные процессы в инерционном элементе
1. Включение: Инерционный элемент
|
|
|



а. Подаем синусоидальный сигнал:


Выходной сигнал содержит две составляющие: вынужденную, свободную. Вынужденная пропускает на выход частоты в соответствии со своими инерционного звена 1-го порядка.
На низких частотах, когда ω→0, ωt<<1, тогда амплитуда гармонического вых. сигнала приближается к 1, а фазовый сдвиг → к –π/2. В этом случае вых. сигнал =sinωt.
С ростом частоты амплитуда выходного сигнала уменьшается, фазовый сдвиг растет:

Когда частота приближается к бесконечности, амплитуда стремится к 0, фазовый сдвиг между входным и выходным сигналом равен ( ).
Свободная составляющая присутствует в сигнале в переходном процессе и является основной помехой РЗ, от которой необходимо отстраиваться.
б. Когда на вход подаем сигнал в виде cos, то принципиальных отличий не наблюдается, т.е. присут. свободная и вынужденная составляющие, только в свободной будет «-».
в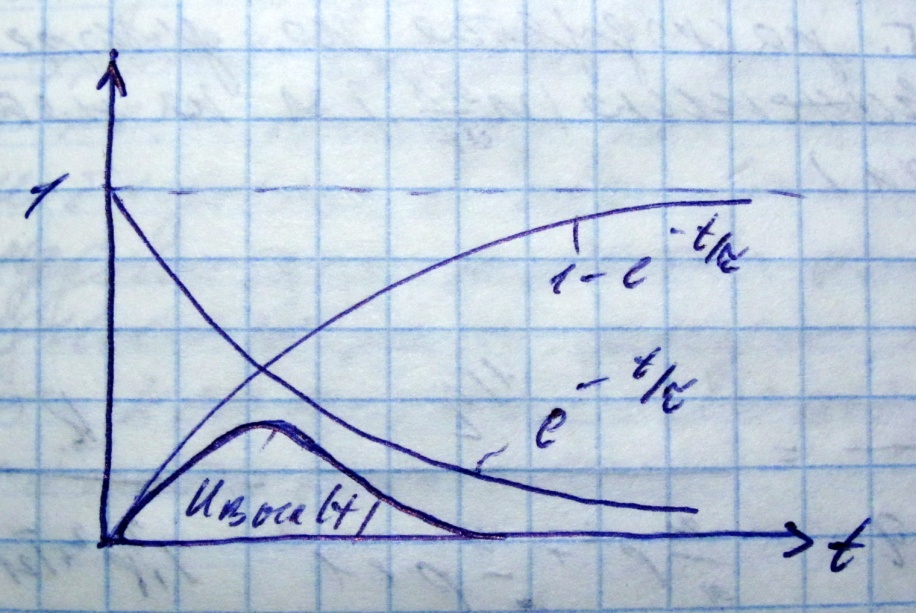 .
Подаем синусоидальный сигнал:
.
Подаем синусоидальный сигнал:

 .
.
Характер переходного процесса можно изобразить в виде 2-х составляющих.
9 Электромагнитное реле
|
Ток в обмотке
Создает магнитный поток
под действием потока поворачивается якорь электромагнитного реле, при чем рабочее усилие F пропорционально Ф2 (или i2). |




 –
постоянная
составляющая
–
постоянная
составляющая
 –
переменная
составляющая
–
переменная
составляющая
Движение якоря определяется уравнением:

m, n, q – постоянные коэффициенты
x – координаты перемещения якоря
F – электромагнитное усилие.
Из
формулы видно, что избыточное усилие
расходуется на ускорение ( ),
сопротивление движению (
),
сопротивление движению ( )
и на натяжение пружины (qx).
)
и на натяжение пружины (qx).

Такая передаточная функция соответствует фильтру низких частот 2 порядка. m, n, q – выбраны, чтобы на удвоенной частоте коэффициент передачи фильтра стремился к 0.
Т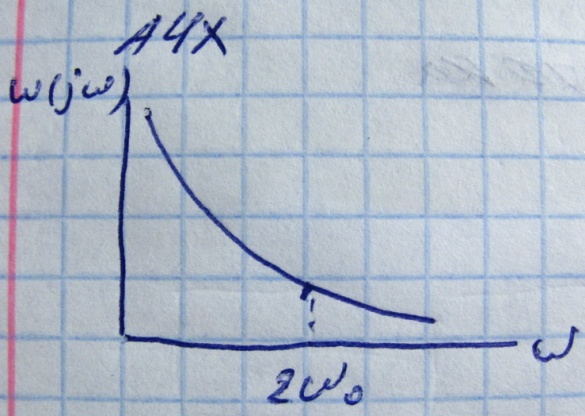 .о.
якорь почти не реагирует на переменную
составляющую F2,
его движение определяется только
постоянной составляющей F0.
.о.
якорь почти не реагирует на переменную
составляющую F2,
его движение определяется только
постоянной составляющей F0.

В 1 эл-те i преобразуется в магн. поток Ф, а во 2 эл-те Ф преобразуется в рабочее усилие F. Элементы безинерционны, 3 элемент учитывает инерционность якоря реле и его фильтрующие свойства по частоте. Проходя через фильтр составляющая двойной частоты F2 значительно ослабляется –> на выходе 3 элемента формируется координата x0, создаваемая усилием F0.

При синусоидальном сигнале реле реагирует на действующее значение тока. По приведенной схеме можно построить аналогичное электромагнитного реле на микроэлектронной элементной базе.
Время срабатывания определяется 3 элементом, для повышения быстродействия необходимо уменьшить постоянные времени частотных фильтров, но это скажется на качестве фильтрации, поэтому необходимо выбрать такую передаточную функцию частотного фильтра, которая обеспечивала бы компромисс между приемлемым качеством и быстродействием.
i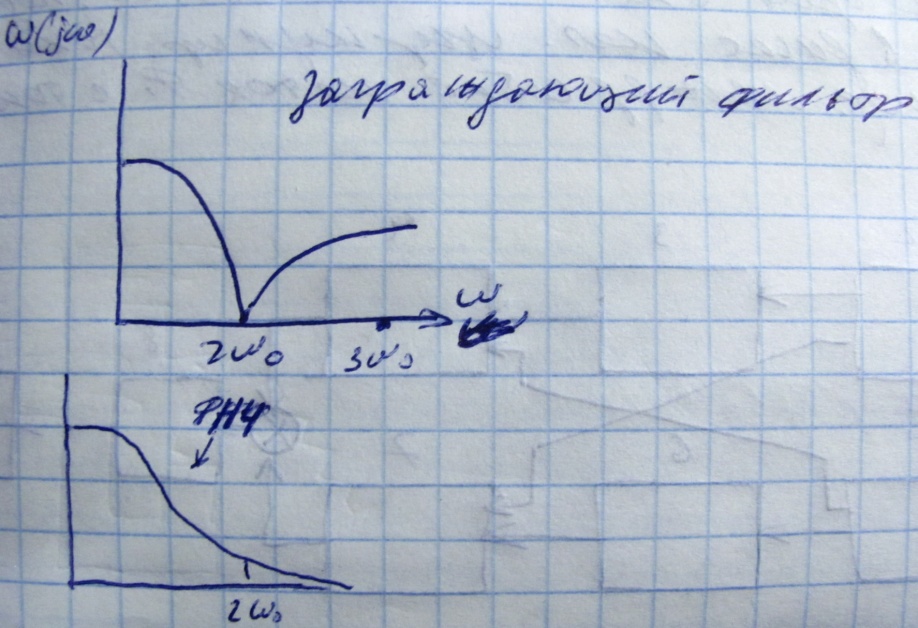 =Im1sinω1t+
Imksinωkt
=Im1sinω1t+
Imksinωkt
Если фильтр:
F0=0,5k·Im2 → F0=0,5k(Im12+ Imk2)
10 Индукционное реле
Вращающий момент индукционного реле пропорционален произведению двух электрических величин.
I·U – реле направления мощности
I2 – м.б. положено в основу токового реле


Вращающий момент индукционного реле создается 2 магнитными потоками:
|
|
|


 +φ)
+φ)Эти потоки сдвинуты в пространстве и во времени. Эти потоки пронизывая диск реле наводят в нем 2 ЭДС e1 и e2, под действием кот. в диске начинают циркулировать токи i1 и i2. Между собой взаимодействуют Ф1 и ток i2, Ф2 и ток i1.
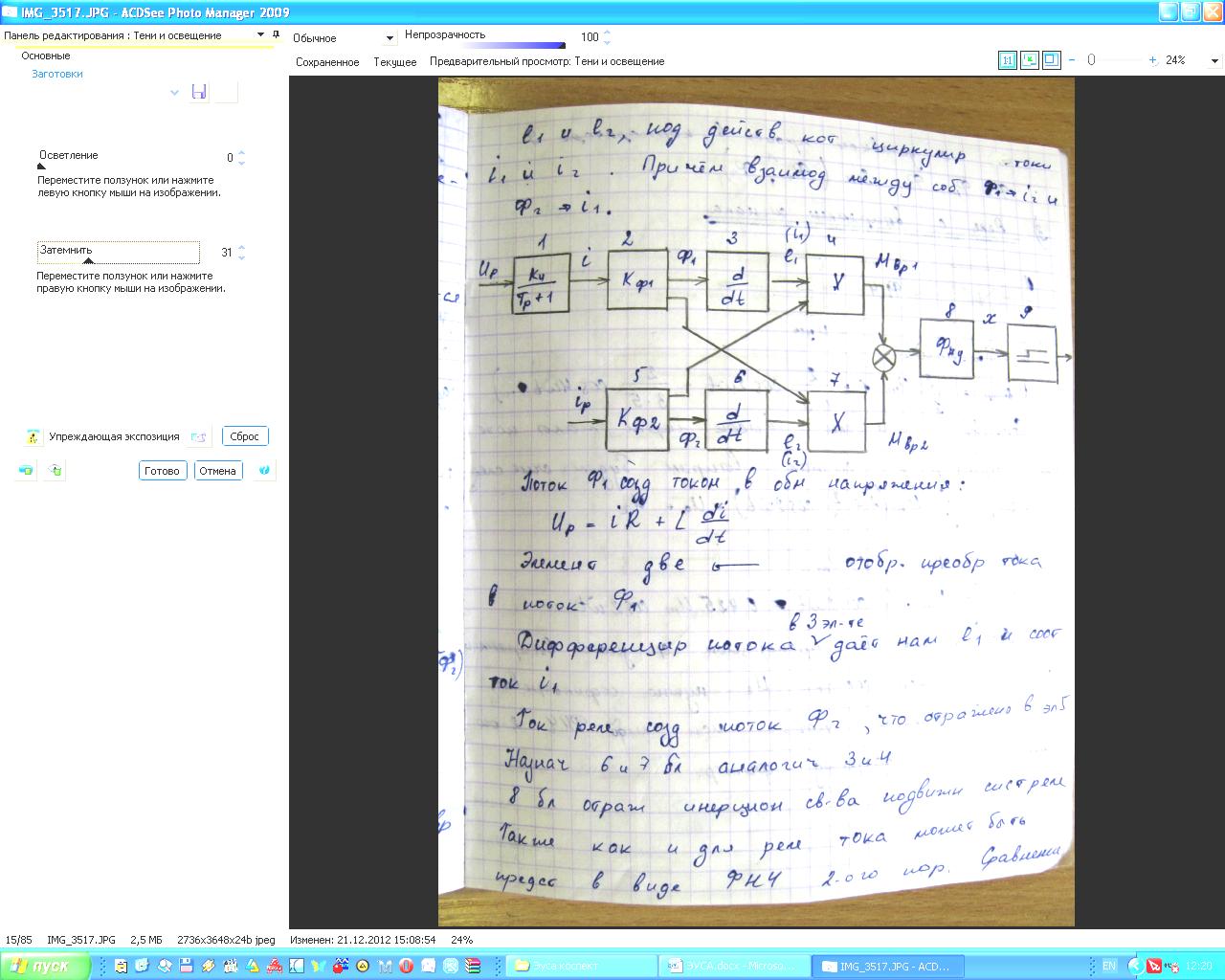
Поток
Ф1
создается током в обмотке напряжения:

Элемент 2 отражает преобразование тока в поток Ф1, дифференцирование потока в 3 элементе дает ЭДС e1 и ток i1.
Ток в реле создает поток Ф2 (отражено в элементе 5). 6 и 7 аналогичны 3 и 4.
8
блок отражает инерционные свойства
подвижной системы реле, как и для реле
тока может быть представлено фильтром
низких частот 2-го порядка. Сравнение с
уставкой происходит в компараторе 9.
