

Пуск в ход ад: а) с короткозамкнутым ротором, б) с фазным ротором. Ад с улучшенными пусковыми свойствами ( глубокопазный и с двойной беличьей клеткой)
Пуск двигателя с фазным ротором
Асинхронные
двигатели с фазным ротором применяются
значительно реже двигателей с
короткозамкнутым ротором. Они используются
в следующих случаях: 1) когда двигатели
с короткозамкнутым ротором не могут
быть использованы по условиям регулирования
частоты вращения; 2) когда статический
момент сопротивления на валу
![]() больше
пускового момента
больше
пускового момента
![]() короткозамкнутого
двигателя; из уравнения движения
короткозамкнутого
двигателя; из уравнения движения
![]() следует,
что ротор в этом случае не раскрутится.
Пуск двигателей с фазным ротором
производится с помощью пускового
реостата в цепи ротора, рис. 10.4, а.
следует,
что ротор в этом случае не раскрутится.
Пуск двигателей с фазным ротором
производится с помощью пускового
реостата в цепи ротора, рис. 10.4, а.
Когда
ползунки трехфазного реостата ПР
поставлены в положение I, то в цепь ротора
вводится наибольшее активное сопротивление.
Его подбирают такой величины, чтобы
механическая характеристика двигателя
имела вид кривой I (рис. 10.4, б).
Таким образом, пусковой момент
будет
равен максимальному
![]() и
и
![]() .
Начнется разгон.
.
Начнется разгон.
По
мере разгона двигателя, например, при
![]() ползунки
реостата переводят в положение II, тем
самым выводят часть сопротивления из
цепи обмотки ротора. Двигатель переходит
на новую механическую характеристику
II, по которой разгоняется до какого-то
скольжения
ползунки
реостата переводят в положение II, тем
самым выводят часть сопротивления из
цепи обмотки ротора. Двигатель переходит
на новую механическую характеристику
II, по которой разгоняется до какого-то
скольжения
![]() ,
после чего ползунки перемещают в
положение III. Все сопротивление выводится
из цепи обмотки ротора, он становится
короткозамкнутым и работает на своей
естественной характеристике III, разгоняясь
до установившегося скольжения
,
после чего ползунки перемещают в
положение III. Все сопротивление выводится
из цепи обмотки ротора, он становится
короткозамкнутым и работает на своей
естественной характеристике III, разгоняясь
до установившегося скольжения
![]() ,
когда
,
когда
![]() .
.
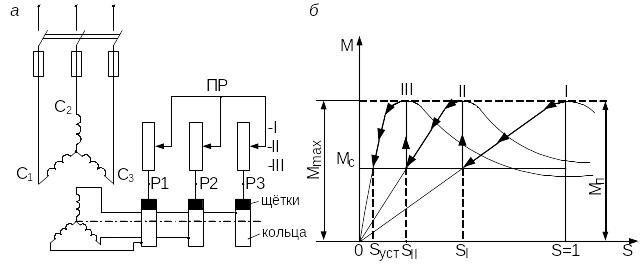
Рис. 10.4. Схема включения реостата: а – пускового;
б – механические характеристики при действии реостата
Пуск может быть с ручным управлением в том случае, кода при ступенчатом регулировании величины сопротивления используют контроллеры, или пуск автоматический.
Пуск в ход двигателя с короткозамкнутым ротором Пуск в ход двигателя непосредственным включением в сеть. Этот способ пуска отличается от других своей простотой. Однако в момент подключения двигателя к сети в цепи статора возникает большой пусковой ток, в 5-7 раз превышающий номинальный ток двигателя. При малой инерционности исполнительного механизма скорость двигателя очень быстро возрастает до установленного значения, и ток спадает, достигая величины, соответствующей нагрузке двигателя. В этих условиях пусковой ток не представляет опасности для двигателя, поскольку он быстро спадает и не может вызвать перегрева обмоток машин. Но значительный бросок тока в цепи двигателя влияет на питающую сеть и при недостаточной мощности последней это влияние может выразиться в заметных колебаниях напряжения сети. Однако при современных мощных энергетических системах и сетях двигатели с короткозамкнутым ротором, как правило, запускаются непосредственным включением в сеть на полное напряжение.
При необходимости уменьшения пускового тока применяют какой-либо из способов пуска при пониженном напряжении.
Способы регулирования частоты вращения ад. Закон регулирования частоты вращения при изменении частоты питающей сети (f)
Частота вращения асинхронного двигателя
n = n1 (1 – s) = (60f1/p) (1-s) (85)
Из этого выражения видно, что ее можно регулировать, изменяя частоту f1 питающего напряжения, число пар полюсов р и
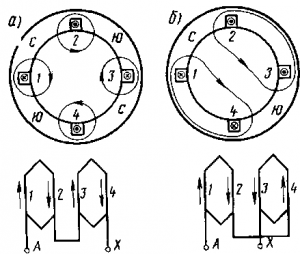 Рис.
266. Схема переключения катушек обмотки
статора (одной фазы) для изменения числа
полюсов: а — при четырех полюсах; б —
при двух полюсах
Рис.
266. Схема переключения катушек обмотки
статора (одной фазы) для изменения числа
полюсов: а — при четырех полюсах; б —
при двух полюсах
скольжение s. Последнее при заданных значениях момента на валу Мвн и частоты f1 можно изменять путем включения в цепь обмотки ротора реостата.
Регулирование путем изменения частоты питающего напряжения. Этот способ требует наличия преобразователя частоты, к которому должен быть подключен асинхронный двигатель. На основе управляемых полупроводниковых вентилей (тиристоров) созданы статические преобразователи частоты и построен ряд опытных электровозов и тепловозов с асинхронными двигателями, частота вращения которых регулируется путем изменения частоты питающего напряжения. Такой способ регулирования частоты вращения ротора асинхронного двигателя является весьма перспективным.
Регулирование путем изменения числа пар полюсов. Этот способ позволяет получить ступенчатое изменение частоты вращения. Для этой цели отдельные катушки 1, 2 и 3, 4, составляющие одну фазу (рис. 266), переключаются так, чтобы изменялось соответствующим образом направление тока в них (например, с последовательного согласного соединения на встречное). При согласном включении катушек (рис. 266, а) число полюсов равно четырем, при встречном включении (рис. 266, б) — двум. Катушки двух других фаз, сдвинутые в пространстве на 120°, соединяются таким же образом. Такое же уменьшение числа полюсов можно осуществить при переключении катушек с последовательного на параллельное соединение. При изменении числа полюсов изменяется частота вращения n1 магнитного поля двигателя, а следовательно, и частота вращения n его ротора. Если нужно иметь три или четыре частоты вращения n1, то на статоре располагают еще одну обмотку, при переключении которой можно получить еще две частоты. Существуют двигатели, которые обеспечивают изменение частоты вращения n1 при постоянном наибольшем моменте или при приблизительно постоянной мощности (рис. 267).
В асинхронном двигателе число полюсов ротора должно быть равно числу полюсов статора. В короткозамкнутом роторе это условие выполняется автоматически и при переключении обмотки статора никаких изменений в обмотке ротора выполнять не требуется.
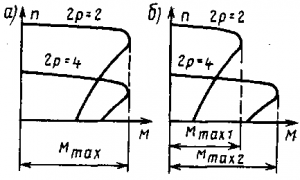 Рис.
267. Механические характеристики
двухскоростных асинхронных двигателей
с постоянным наибольшим моментом (а) и
постоянной мощностью (б)
Рис.
267. Механические характеристики
двухскоростных асинхронных двигателей
с постоянным наибольшим моментом (а) и
постоянной мощностью (б)
 Рис.
268. Механические характеристики
асинхронного двигателя при регулировании
частоты вращения путем включения
реостата в цепь обмотки ротора
Рис.
268. Механические характеристики
асинхронного двигателя при регулировании
частоты вращения путем включения
реостата в цепь обмотки ротора
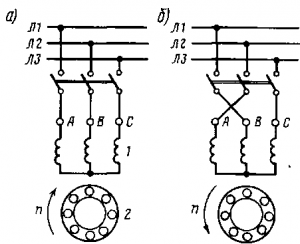 Рис.
269. Схемы подключения асинхронного
двигателя к сети при изменении направления
его вращения
Рис.
269. Схемы подключения асинхронного
двигателя к сети при изменении направления
его вращения
В двигателе же с фазным ротором в этом случае надо было бы изменять число полюсов обмотки ротора, что сильно усложнило бы его конструкцию, поэтому такой способ регулирования частоты вращения используется только в двигателях с коротко-замкнутым ротором. Такие двигатели имеют большие габаритные размеры и массу по сравнению с двигателями общего применения, а следовательно, и большую стоимость. Кроме того, регулирование осуществляется большими ступенями; при частоте f1 = 50 Гц частота вращения поля n1 при переключениях изменяется в отношении 3000:1500:1000:750.
Регулирование путем включения в цепь ротора реостата. При включении в цепь обмотки ротора реостата с различным сопротивлением (Rп4, RпЗ, Rп2 и т. д.) получаем ряд реостатных механических характеристик 4, 3 и 2 двигателя. При этом некоторому нагрузочному моменту Мном (рис. 268) будут соответствовать меньшие частоты вращения n4, n3, n2 и т. д., чем частота nе при работе двигателя на естественной характеристике 1 (при Rп = 0). Это способ регулирования может быть использован только для двигателей с фазным ротором. Он позволяет плавно изменять частоту вращения в широких пределах. Недостатками его являются большие потери энергии в регулировочном реостате, поэтому его используют только при кратковременных режимах работы двигателя (при пуске и пр.).
Изменение направления вращения. Для изменения направления вращения двигателя нужно изменить направление вращения магнитного поля, создаваемого обмотками статора. Это достигается изменением порядка чередования тока в фазах обмотки статора. Например, если максимумы токов поступают в фазы обмотки статора 1 (рис. 269, а) в следующем порядке: фаза А — фаза В — фаза С, то ротор 2 двигателя будет вращаться по часовой стрелке. Если же подавать их в такой последовательности: фаза В — фаза А — фаза С, то ротор начнет вращаться против часовой стрелки. Для этой цели необходимо изменить схему соединения обмоток статора с сетью, переключив две любые фазы (провода). Например, зажим А обмотки статора, который ранее был соединен с линейным проводом Л1, нужно переключить на провод Л2, а зажим В этой обмотки, соединенный ранее с Л2, переключить на провод Л1 (рис. 269,б). Такое переключение можно осуществить обычным переключателем.
Регулирование частоты вращения асинхронных двигателей изменением частоты в питающей сети является наиболее экономичным способом регулирования и позволяет получить хорошие механические характеристики электропривода (рис. 26). При изменении частоты питающей сети обеспечивается изменение частоты вращения магнитного поля асинхронного двигателя, что также следует из формулы (7).
Источник питания двигателя должен осуществлять преобразование напряжения стандартной частоты сети fн = 50 Гц в напряжение с требуемой частотой. Одновременно с изменением частоты должна регулироваться по определенному закону и величина подводимого к двигателю напряжения Uрег , чтобы обеспечить высокую жесткость механической характеристики.
При регулировании частоты вращения асинхронных двигателей за счет изменения частоты в питающей сети возможны обеспечения различных режимов работы: с постоянным вращающим моментом M = const ;
|
Рис. 26. Механические характеристики при регулировании частоты вращения асинхронных двигателей с помощью изменения частоты питающего напряжения (с учетом влияния активного сопротивления статора). |

с постоянной мощностью на валу P = const;
с моментом, пропорциональным квадрату частоты, M =— f 2.
Зависимости между регулируемыми напряжением и частотой с учетом влияния активного сопротивления статора, изменения жесткости механических характеристик, насыщения стали, ухудшения теплоотдачи на низких частотах вращения ротора двигателя имеют довольно сложный характер.
В качестве источника питания могут применяться электромашинные вращающиеся преобразователи, использующие электрические машины, или статические преобразователи, постоянные с использованием полупроводниковых и магнитных приборов (более подробно см. [Л. 2,4]). Положительным свойством частотного регулирования является возможность плавного регулирования в широком диапазоне, в обе стороны от естественной характеристики (в том числе возможно вращение двигателя с частотой, большей номинальной). При регулировании обеспечиваются жесткость характеристик и высокая перегрузочная способность.
Недостатками данного способа регулирования можно считать большую сложность преобразовательного устройства, сравнительно высокую стоимость оборудования и др.