

1.Перечень вопросам к тестам 1ого уровня. Основные понятие, определения, алгоритмы и формулы.
1.
-Прочность конструкции заключается в свойстве конструкции сопротивляться разрушению в целом или отдельных ее элементов.
-Жесткость конструкции характеризуется способностью сопротивляться возникновению в ней перемещений.
-Устойчивость состоит в способности конструкции сохранять заданное положение в пространстве и исходную форму равновесия в деформированном состоянии.
-Строительная механика в широком смысле слова включает в себя следующие дисциплины: сопромат, теорию упругости/пластичности/ползучести, строймех стержневых систем, строймех тонкостенных пространственных систем.
-Строительная механика в узком смысле слова включает в себя разработку методов определения внутренних усилий и перемещений (строймех стержневых систем).
-Основная задача строительной механики стержневых систем является разработка методов расчета и получения данных для надежного и экономичного проектирования зданий и сооружений.
-Направление схематизации конструкции при образовании ее расчетной модели:
1.моделирование геометрических конструкций
2.моделирование материальных конструкций
3.моделирование воздействий на конструкцию
4.моделирование прочности конструкции
-Составляющие схематизации геометрии конструкции (схематизация изображений геометрической формы конструкции за счет упрощений в изображениях элементов конструкций, узловых соединений и опорных закрепителей):
1.схематизация изображений элементов конструкции
2.схематизация изображений узловых соединений элементов конструкции между собой
3.схематизация изображения опорных устройств конструкции
-Расчетная схема конструкции называется упрощенное изображение, применяемое при расчете конструкций, которое отражает наиболее существенные особенности геометрической формы, определяющие восприятие конструкций внешних воздействий.
-Виды внешних воздействий на конструкции:
1.силовое воздействие(нагрузка)
2.температурное воздействие(температура)
3.кинематическое воздействие(осадка опор)
4.другие(электромагнитные, биохимические и прочее)
-Несущая способность конструкции – это свойство конструкции воспринимать нагрузки и оставаться прочной, то есть не получать разрушения в целом или отдельных её элементов.
-Методы определения несущей способности конструкции:
1.расчет по допускаемым напряжениям
2.расчет по разрушающим нагрузкам
3.расчет по предельным состояниям
-Параметры напряженно-деформируемого состояния (ндс) конструкции:
-Кривая равновесных состояний – это линия, которая в системе осей НДС описывает всё множество состояний равновесия конструкции при её статической нагрузки от О до несущей конструкции (рис).
Р – 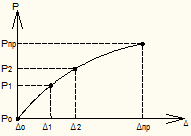 нагрузка
нагрузка
Δ – перемещение
Р0 – ненагруженно
Δ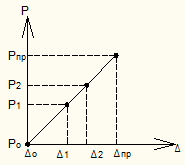 0
– исходное положение
0
– исходное положение
Рпр – предельно
Δпр – состояние равновесия
-Линейно деформируемая система – это расчетная модель конструкции, у которой между нагрузкой вызываемыми ею перемещениями, а также внутренними усилиями принимается прямая пропорциональная зависимость (рис).
-Принцип независимости действия сил заключается в том, что при действии на конструкцию нескольких нагрузок возникающие внутренние усилия и перемещения равняются сумме внутренних усилий и перемещений от действия каждой нагрузки в отдельности.
-Принцип начальных размеров заключается в том, что при составлении уравнений равновесия конструкции не учитываются изменения её формы и размеров вследствие деформирования.
- Нелинейно деформируемой системой называется расчетная модель конструкции, у которой между нагрузкой и вызываемыми ею перемещениями принимается нелинейная зависимость (рис).
-Виды нелинейно деформируемых систем:
1.геометрически нелинейные системы
2.физически нелинейные системы
3.геометрически и физически нелинейные системы
-Виды расчетных схем конструкций по статическому признаку
1.статически определимые
2.статически неопределимые
3.статически противоречивые
-Виды расчетных схем конструкций по кинематическому признаку
1.геометрически неизменяемые
2.геометрически изменяемые
-Взаимосвязь статических и кинематических признаков расчетных схем конструкций:
1.геометрически изменяемые системы с любым типом изменяемости являются статически противоречивыми системами
2.геометрически неизменяемые системы с необходимым числом связей являются статически определимыми системами
3.геометрически неизменяемые системы с избыточным числом элементов являются статически неопределимыми системами
-Расчетная схема конструкции считается геометрически неизменяемой системой , если она не допускает относительные перемещения элементов без деформации материала.
-Виды геометрически неизменяемых систем:
1.с необходимым числом связей
2.с избыточным числом связей
-Расчетная схема конструкции считается геометрически изменяемой системой , если она допускает относительные перемещения элементов без деформации материала.
-Виды геометрически изменяемых систем:
1.с конечной изменяемостью
2.с мгновенной изменяемостью
-Формула для подсчета числа степеней свободы плоской стержневой системы W = 3Д + 2У - 2Ш – С - Соп
-Случаи, которые могут возникать при подсчете числа степеней свободы
1.W ˃ 0 Система является геометрически изменяемой (т.к. число степеней свободы, приносимых элементами цепи, превышает число степеней свободы, выключаемых кинематическими связями. Условие геометрической изменяемости является необходимым и достаточным), статически противоречива.
2.W ˂ 0 Система является геометрически неизменяемой с избыточным числом связей, статически неопределима
3.W = 0 Система является геометрически неизменяемой с достаточным числом связей, статически определима
-Анализ геометрической структуры плоской стержневой системы заключается в последовательном рассмотрении схем соединения кинематическими связями дисков и узлов кинематической цепи конструкции между собой и с основанием.