

8.Статическое и динамическое проявление сил. Законы Ньютона. Принцип независимости действия сил.
Статическое и динамическое проявление сил.
В процессе взаимодействия (в результате действия сил) тела изменяют свое внутреннее состояние и (или) состояние движения. В соответствии с этим рассматривают статическое проявление сил (приводящее к изменению внутреннего состояния тел) и динамическое (приводящее к изменению состояния движения). Например, при скольжении тела по наклонной плоскости сила его тяжести проявляется двояким образом: сообщая телу ускорение (динамически) и деформируя его в результате взаимодействия с наклонной плоскостью (статически). Поэтому в самом общем смысле все способы измерения сил можно разделить на два класса - статические и динамические. Пример: пружинный динамометр и акселерометр.
1-й ЗАКОН НЬЮТОНА (ЗАКОН ИНЕРЦИИ).
Существуют такие системы отсчета, в которых тело, предоставленное самому себе, может находиться в состоянии покоя или равномерного и прямолинейного движения, пока и поскольку действие внешних сил не вынудят его изменить это состояние.
Способность тел сохранять состояние покоя или равномерного и прямолинейного движения, препятствуя внешним воздействиям, называется инертностью. Это – внутреннее свойство, присущее всем телам, независимо от их природы и состояния. Причины же, вызывающие изменения состояния тела, всегда внешние - это силы.
Количественной мерой инертности тел является их масса.
2-й ЗАКОН НЬЮТОНА (ОСНОВНОЙ ЗАКОН ДИНАМИКИ
Как и все законы динамики основной закон получен опытным путем. В частном случае, когда масса тела в процессе взаимодействий не изменяется, основной закон динамики формулируется в форме: ускорение, получаемое телом в результате действия на него системы сил, прямо пропорционально
равнодействующей приложенной системы сил, обратно пропорционально массе тел и направлено вдоль линии действия равнодействующей.
М
 атематическая
формулировка частной формы основного
закона динамики имеет вид:
атематическая
формулировка частной формы основного
закона динамики имеет вид:
где: F - равнодействующая приложенной системы сил.
Более общей является следующая формулировка основного закона:
Изменение импульса тела пропорционально импульсу равнодействующей приложенной системы сил и направлено вдоль линии действия равнодействующей.
П
 од
импульсом силы понимают произведение
силы на время ее действия. Математическая
формулировка общей формы основного
закона динамики имеет вид:
од
импульсом силы понимают произведение
силы на время ее действия. Математическая
формулировка общей формы основного
закона динамики имеет вид:
(продолжение)8.Статическое и динамическое проявление сил. Законы Ньютона. Принцип независимости действия сил.
3-й ЗАКОН ДИНАМИКИ (ЗАКОН ДЕЙСТВИЯ И ПРОТИВОДЕЙСТВИЯ).
Существует две равноправные формулировки 3-го закона:
Действию всегда есть равное и противоположно направленное противодействие
Тела действуют друг на друга с силами, равными по величине и противоположно направленными.
Эти формулировки получены в результате обобщения экспериментальных фактов, которые свидетельствуют о том, что тела взаимодействуют всегда попарно, т.е. на изолированное тело силы не действуют.
С 3-м законом динамики тесно связан закон сохранения импульса. Действительно, если на два тела действуют только силы взаимодействия между ними, то, по 3-му закону динамики, эти силы равны по величине и противоположно направлены. Следовательно, по основному закону, одинаковы и противоположно направлены изменения импульсов тел, а общий импульс системы тел не изменяется.
ПРИНЦИП НЕЗАВИСИМОСТИ ДЕЙСТВИЯ СИЛ.
Если на тело действует несколько сил, то каждая из них сообщает телу ускорение, определяемое основным законом динамики, так, как если бы других сил не было.
Например, произвольно направленную и в пространстве силу F можно представить в виде суммы ее составляющих (компонентов):

где ex, ey, ez - орты прямоугольной системы координат OXYz.
Второй закон динамики в этом случае имеет вид:

откуда:

Т. о., в приведенном рассуждении учтен принцип независимости действия сил.
9.Момент силы относительно произвольного центра. Момент силы относительно произвольной оси.
Момент силы относительно произвольного центра
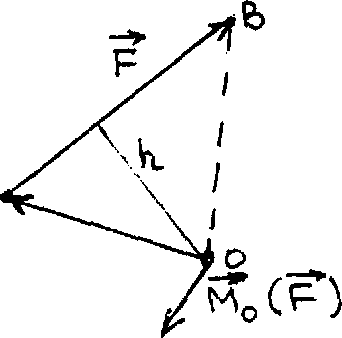
Моментом силы называют количественную меру вращательного эффекта, вызываемого силой. Момент силы должен определять величину этого эффекта, плоскость поворота точки и направление поворота в этой плоскости.
 (рис 23)
(рис 23)
Величина момента силы равна произведению модуля силы на ее плечо h (величину перпендикуляра, опущенного из заданного центра O на линию действия силы). Если начало вектора силы совпадает с точкой А, а конец – А с точкой В, то, очевидно, плоскость поворота совпадает с плоскостью треугольника OAB (рис. 23).
У словились
вектор момента силы относительно центра
M0(F)
проводить из этого центра O перпендикулярно
плоскости поворота в ту сторону, откуда
поворот виден происходящим против хода
часовых стрелок. Модуль же вектора
(длина вектора в выбранном масштабе)
равен .
словились
вектор момента силы относительно центра
M0(F)
проводить из этого центра O перпендикулярно
плоскости поворота в ту сторону, откуда
поворот виден происходящим против хода
часовых стрелок. Модуль же вектора
(длина вектора в выбранном масштабе)
равен .
О
 чевидно,
что такой вектор равен векторному
произведению:
чевидно,
что такой вектор равен векторному
произведению:
где: r - радиус-вектор точки приложения силы, проведенный из заданного центра.
Момент силы относительно произвольной оси.
Моментом силы относительно оси называют величину, характеризующую вращательный эффект, вызываемый силой при вращении тела вокруг заданной оси.
К телу А, способному вращаться вокруг оси z приложена сила F (рис. 24). Очевидно, что эффект вызываемый силой, определяется суммой эффектов, вызываемых ее проекциями Fz и Fxy, первая из которых вращения тела вокруг оси z вызвать не может. Следовательно, момент силы относительно заданной оси определяется моментом ее проекции на плоскость, перпендикулярную оси, относительно точки Пересечения оси с плоскостью.