

1.Определение положения точки в пространстве. Вектор перемещения.
Определение положения точки в пространстве.
 Для описания движения точки, т.е.
изменения ее положения с течением
времени, прежде всего, надо в любой
момент времени указать ее местоположение
координатным или векторным способом.
Оба способа задания положения тела в
пространстве эквивалентны, т.е. зная
координаты точки, можно указать ее
радиус-вектор, и наоборот. Из рис. 1 видно,
что радиус-вектор представить можно
д
иагональю
прямоугольного параллелепипеда со
сторонами, численно равными координатам
точки Ха, Ya и Za. Отсюда
очевидна связь модуля радиус-вектора
точки с ее координатами:
Для описания движения точки, т.е.
изменения ее положения с течением
времени, прежде всего, надо в любой
момент времени указать ее местоположение
координатным или векторным способом.
Оба способа задания положения тела в
пространстве эквивалентны, т.е. зная
координаты точки, можно указать ее
радиус-вектор, и наоборот. Из рис. 1 видно,
что радиус-вектор представить можно
д
иагональю
прямоугольного параллелепипеда со
сторонами, численно равными координатам
точки Ха, Ya и Za. Отсюда
очевидна связь модуля радиус-вектора
точки с ее координатами:



 Для определения
направления радиус-вектора в пространстве
можно определить углы ,
,
,
которые радиус-вектор образует с
координатными осями OX, OY, и OZ соответственно.
Тогда:
Для определения
направления радиус-вектора в пространстве
можно определить углы ,
,
,
которые радиус-вектор образует с
координатными осями OX, OY, и OZ соответственно.
Тогда:
Таким образом, зная координаты точки, можно определить величину (1) радиус-вектора, и его направление в пространстве по так называемым направляющим косинусам (2), (3) и (4).
При движении точки ее координаты и радиус-вектор с течением времени изменяются, для определения характеристик движения вводят три вектора: перемещения, скорости и ускорения.
Вектор перемещения.
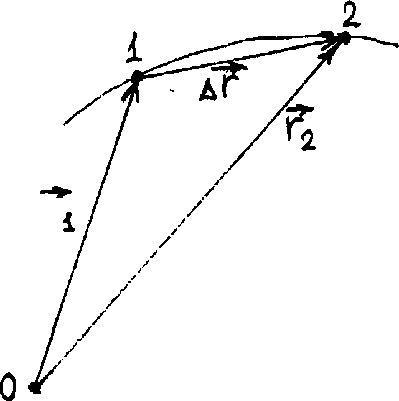
Для определения перемещения точки в пространстве вводят вектор перемещения.
Н



 апример,
за промежуток времени t
точка перемещается из положения 1 в
положение 2 (рис. 2), определяемые векторным
способом указанием радиус-векторов
и ; вектором перемещения
называют вектор, проведенный из начального
положения 1 в конечное 2 перемещаемого
тела. Из векторного треугольника видно,
что вектор перемещения равен приращению
радиус-вектора точки. Наряду с изменением
радиус-вектора точки происходит изменение
ее координат, т.е. перемещение точки
вдоль отдельных координатных направлений.
Из рис.3 видно, что
апример,
за промежуток времени t
точка перемещается из положения 1 в
положение 2 (рис. 2), определяемые векторным
способом указанием радиус-векторов
и ; вектором перемещения
называют вектор, проведенный из начального
положения 1 в конечное 2 перемещаемого
тела. Из векторного треугольника видно,
что вектор перемещения равен приращению
радиус-вектора точки. Наряду с изменением
радиус-вектора точки происходит изменение
ее координат, т.е. перемещение точки
вдоль отдельных координатных направлений.
Из рис.3 видно, что
В
 ектор
перемещения за конечный промежуток
времени в общем случае не совпадает с
направлением движения (направлением
касательной к траектории движения).
Очевидно, что эти направления будут
совпадать в общем случае движения только
для бесконечно малых перемещений точки
.
ектор
перемещения за конечный промежуток
времени в общем случае не совпадает с
направлением движения (направлением
касательной к траектории движения).
Очевидно, что эти направления будут
совпадать в общем случае движения только
для бесконечно малых перемещений точки
.
2. Вектор скорости. Вектор ускорения. Тангенциальное и нормальное ускорение
Вектор скорости.
Вектором скорости называют вектор, определяющий быстроту и направление движения.
В
 ектором
средней скорости называют отношение
вектора перемещения к промежутку
времени, за который это перемещение
происходит:
ектором
средней скорости называют отношение
вектора перемещения к промежутку
времени, за который это перемещение
происходит:
Так как в произвольном случае движения вектор перемещения за конечный промежуток времени не определяет точно направление движения, это не может сделать и вектор средней скорости. Следовательно, необходимо рассматривать перемещения за бесконечно малые промежутки времени.
 Вектором истинной (мгновенной) скорости
называют предел, к которому стремится
значение вектора средней скорости при
бесконечном убывании промежутка времени:
Вектором истинной (мгновенной) скорости
называют предел, к которому стремится
значение вектора средней скорости при
бесконечном убывании промежутка времени:
Так как при движении тела в общем случае изменяются все три его координаты, часто бывает удобным рассматривать скорость движения точки вдоль отдельных координатных направлений (компоненты или составляющие вектора скорости). Компоненты средней скорости равны:
К


 омпоненты
же мгновенной скорости определяются
как
омпоненты
же мгновенной скорости определяются
как
Вектор скорости с его компонентами связан такими же по виду соотношениями, как радиус-вектор с
к оординатами
точек:
оординатами
точек:

В ектор
ускорения.
ектор
ускорения.

Вектором ускорения называют вектор, определяющий быстроту и направление изменения вектора скорости. Аналогично определениям для вектора скорости вводятся понятия среднего и мгновенного
у скорения:
скорения:

При движении точки по произвольной траектории вектор изменения скорости Δ и, следовательно, вектор ускорения направлены в сторону вогнутости траектории независимо от того, увеличивается или уменьшается величина скорости (рис. 4, 5):
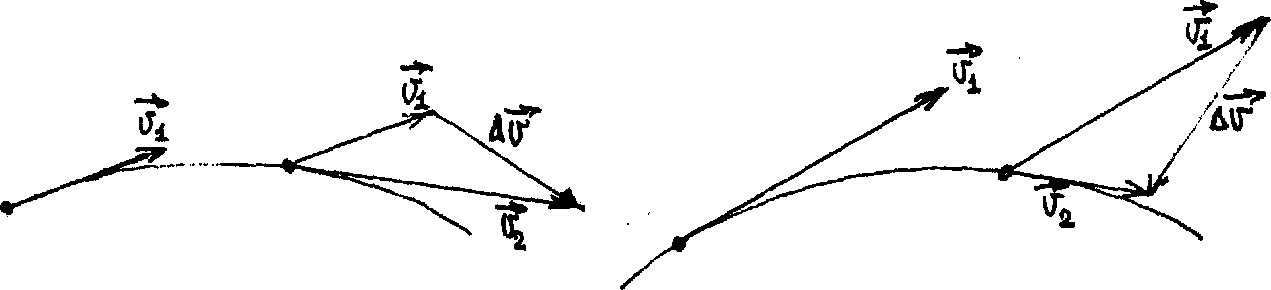
Рис. 4. Ускоренное движение Рис. 5. Замедленное движение
Как видно из рисунков, в обоих случаях вектор d направлен в сторону вогнутости траектории. При ускоренном движении он отклоняется в сторону движения, при замедленном - в противоположную
(продолжение) 2.Вектор скорости. Вектор ускорения. Тангенциальное и нормальное ускорение
Для определения мгновенного ускорения надо рассматривать бесконечно малые перемещения, т.е. векторы скорости 1 и 2 в соседних точках траектории. Поэтому вектор ускорения лежит в плоскости, содержащей касательную к траектории в данной точке и прямую, параллельную касательной в соседней точке траектории. Такая плоскость называется соприкасающейся. Поэтому наряду с представлением вектора ускорения компонентами


можно рассматривать составляющие вектора в соприкасающейся плоскости (т.е. только две компоненты). Для определения этих составляющих в любой точке траектории проводят соприкасавшуюся плоскость и в ней две оси - нормальную On. в сторону вогнутости траектории и касательную Ot по касательной к траектории. Изменение скорости и, соответственно, ускорение можно рассматривать в проекциях на эти оси (рис. 6).
Двигаясь вдоль траектории, за промежуток времени t точка проходит путь S скорость ее изменяется от до 1, при этом 1 составляет угол (альфа) с осью Ot. По определению мгновенного ускорения:
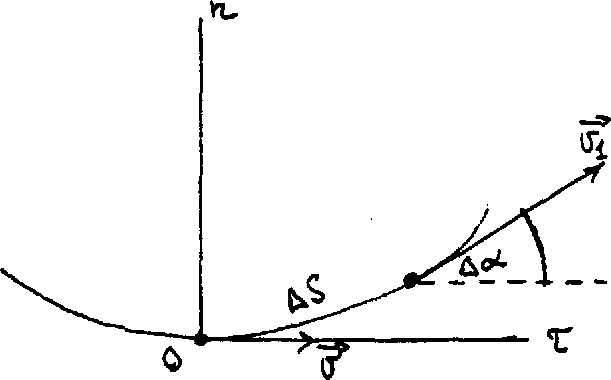
 рис.6
рис.6


П реобразуем
выражение предела, умножив и разделив
его на
и S:
реобразуем
выражение предела, умножив и разделив
его на
и S:
О тметим,
что при t=0
бесконечно убывает и пройденный путь,
и угол (S=0,
a=0).
При этом условии значения пределов
равны:
тметим,
что при t=0
бесконечно убывает и пройденный путь,
и угол (S=0,
a=0).
При этом условии значения пределов
равны:

Предел же называется кривизной траектории К. Кривизна траектории обратно
п ропорциональна
радиусу кривизны траектории:
ропорциональна
радиусу кривизны траектории:
(продолжение2) 2.Вектор скорости. Вектор ускорения. Тангенциальное и нормальное ускорение
С учетом этих замечаний выражение для
нормальной составляющей вектора
ускорения принимает вид
учетом этих замечаний выражение для
нормальной составляющей вектора
ускорения принимает вид

Для выяснения физического смысла ускорения рассмотрим два частных случая движения.
Р авномерное
криволинейное движение (V=const, k<>0). В
этом случае, как видно из (14) и
авномерное
криволинейное движение (V=const, k<>0). В
этом случае, как видно из (14) и
(16),
Н еравномерное
прямолинейное движение (V<>соnst , K=0).
При таком движении
еравномерное
прямолинейное движение (V<>соnst , K=0).
При таком движении
Следовательно, касательная составляющая ускорения определяет изменение вектора скорости по величине, а нормальная - по направлению.