

Обобщенная структурная схема системы автоматического управления (сау).
Для любых систем, в которых протекают процессы управления характерно, что отдельные её элементы связаны таким образом, что передают друг другу некоторые сообщения о происходящих в них процессах посредством сигналов.
По этому принципу все процессы управления обладают значительным сходством. В технических системах носителями информации могут быть: напряжение, давление и т.д. для получения передачи обработки информации используют определённые звенья.
Звено – элемент системы управления, в которой происходит то либо иное преобразование входного параметра в выходной.
Обобщенная структурная схема САУ с управлением по отклонению(в конспекте только она):
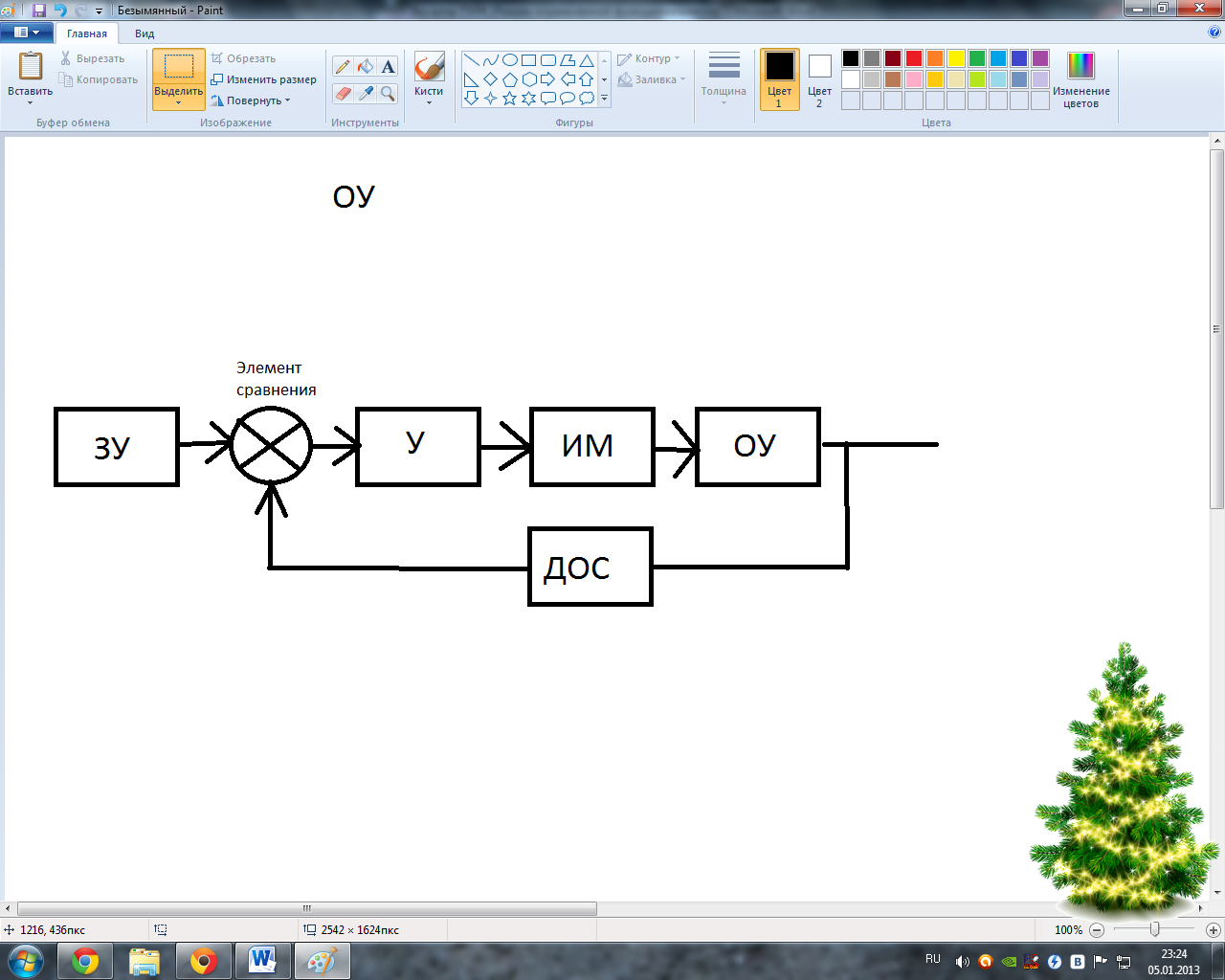
ЗУ – задающее устройство;
У – усилитель;
ИМ – исполнительный механизм;
ОУ – объект управления;
ДОС – датчик обратной связи.
ЗУ оказыв управл возд на вход системы, кот может иметь поступающую задан. величину или измен по опрел закону. Возд выхода сист на ее вход наз ОС.
Комплекс уст-в, присоед к ОУ и обеспечивающ автоматич поддерж заданного значения его управл величины или автоматич измен этой величины по опред закону, наз уст-ом управления.
Классификация сау.
Кроме управления по отклонению есть управление по возмущению (выше быстродействие). САУ в котором используется сочетание этих двух способов - комбинированная система.
Классифицировать САР можно по различным признакам:
по цели управления
-системы для получения заданного закона изменения координат
К ним относятся разомкнутые системы автоматического регулирования. В свою очередь САР делиться на:
+системы автоматического стабилизирования(для поддержания постоянства регулируемой координаты объекта)
+ системы автоматического воспроизведения (для воспроизведения определенного закона выходной координаты)
-система для получения оптимального значения показателя качества процесса
по принципу формирования сигналов управления:
-с непрерывным сигналом(непрерывная функция времени)
- с дискретным сигналом (прерывность управляющего воздействия)
По виду математической модели преобразования координат:
-линейные
-нелинейные (релейные, логические и др.)
По виду управляющих воздействий:
-аналоговые
-дискретные (прерывные, импульсные, цифровые)
Также бывают статические и астатические
Разновидности сау.
Система автоматического контроля (САК) предназначена для автоматического контроля различных физических величин (параметров), сведения о которых необходимы при управлении объектом.
Система автоматического регулирования (САР) обеспечивает поддержание регулируемой величины (параметра) в заданных пределах или по заданному закону
Системой автоматического управления называют такую систему, в которой организация целенаправленных действий осуществляется управляющим элементом, на который подается управляющий сигнал. Этот сигнал может подаваться вручную или автоматически, т. е. системой автоматики другого процесса. Системы могут быть разомкнутыми или замкнутыми.
Следящая система — автоматическая система, в которой выходная величина воспроизводит с определенной точностью входную величину, характер изменения которой заранее не известен. Следящие системы используют для различных целей. В качестве выходной величины следящей системы можно рассматривать совершенно различные физические величины. Одной из наиболее широко распространенных разновидностей следящих систем являются системы управления положением объектов. Такие системы можно рассматривать как дальнейшее развитие и усовершенствование систем дистанционной передачи угловых или линейных перемещений, в которых регулируемой величиной обычно является угол поворота объекта.
Адаптивная (самоприспособляющаяся) система — система автоматического управления, у которой автоматически изменяется способ функционирования управляющей части для осуществления в каком- либо смысле наилучшего управления. В зависимости от поставленной задачи и методов ее решения возможны различные законы управления, поэтому адаптивные системы разделяют на следующие виды:
адаптивные системы функционального регулирования, где управляющее воздействие является функцией какого-либо параметра, например, подача — функция одной из составляющих силы резания, скорость резания — функция мощности;
адаптивные системы предельного (экстремального) регулирования, которые обеспечивают поддержание предельного значения одного или нескольких параметров в объекте;
адаптивные системы оптимального регулирования, в которых учитывается совокупность многих факторов с помощью комплексного критерия оптимальности. В соответствии с этим критерием осуществляется изменение регулируемых параметров и величин, например, поддержание в станке режима обработки, обеспечивающего максимальную производительность и наименьшую себестоимость обработки, определяется заданием оптимальных значений параметров (скоростей сил резания, температуры и т. д.), от которых зависят производительность и себестоимость процесса обработки