

4.4. Дифференцирующие цифровые фильтры.
Передаточная функция. Из выражения для производной
d(exp(jt))/dt = j exp(jt)
следует, что при расчете фильтра производной массива данных необходимо аппроксимировать рядом Фурье передаточную функцию вида H() = j. Поскольку коэффициенты такого фильтра будут обладать нечетной симметрией (h-n = -hn) и выполняется равенство
hn [exp(jn)-exp(-jn)] = 2j hn sin n,
то передаточная характеристика фильтра имеет вид:
H() = 2j(h1 sin + h2 sin 2+ ... + hN sin N),
т.е. является мнимой нечетной, a сам фильтр является линейной комбинацией разностей симметрично расположенных относительно sk значений функции. Уравнение фильтрации:
yn
=
 hn(sk+n
- sk-n).
hn(sk+n
- sk-n).
Если дифференцированию подлежит низкочастотный сигнал, а высокие частоты в массиве данных представлены помехами, то для аппроксимации в пределах частотного диапазона 0-N задается передаточная функция фильтра вида:
Hн() = в, Hн() = 0, в< N.
Оператор дифференцирующего фильтра:
h(n)
= (1/)![]() Hн()
sin(n/N)
dn
= 0,1,2,... (4.4.1)
Hн()
sin(n/N)
dn
= 0,1,2,... (4.4.1)
Принимая, как обычно, N = (t = 1) и решая (4.4.1) при Hн() = , получаем:
hn = (1/)[sin(nв)/n2 - в cos(nв)/n], (4.4.2)
hо = 0, h-n = -hn.
Проверка: Hн() = hn sin n = 2 hn sin n (4.4.3)
Рис. 4.4.1. Коэффициенты
оператора фильтра.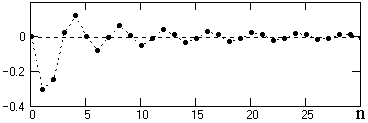
Рис. 4.4.2. Частотные
функции фильтров.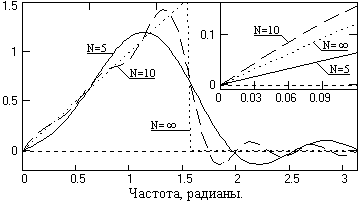
Для оценки возможных погрешностей дифференцирования усеченными операторами произведем расчет фильтра при в = . По формулам (4.4.2) определяем:
h0-10 = 0, 0.3183, 0.25, -0.0354, -0.125, 0.0127, 0.0833, -0.0065, -0.0625, 0.0039, 0.05.
Произведем проверку работы фильтра на простом массиве данных sn = n, производная которого постоянна и равна 1. Для массива с постоянной производной фильтр может быть проверен в любой точке массива, в том числе и в точке n=0, для которой имеем:
у = hn so-n = 2 n hn,
при этом получаем: у=0.5512 при N=5, у=1.53 при N=10.
Рис. 4.4.3. Погрешность
дифференцирования.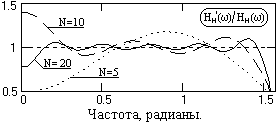
Рис. 4.4.4. Пример
операции дифференцирования.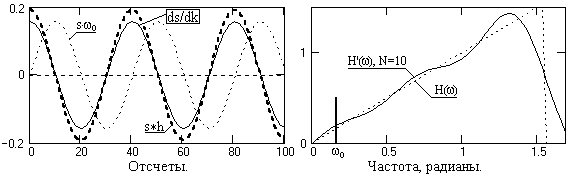
Рис. 4.4.5.
Дифференцирование с применением весовой
функции.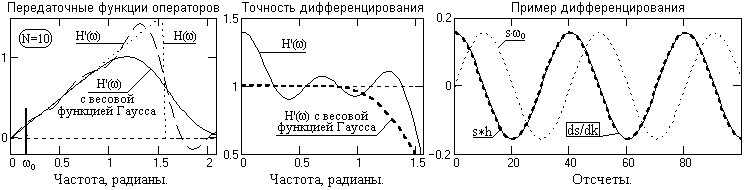
hn = (нcos nн-вcos nв)/(n) + (sin nв-sin nн)/(n2).
(!!!КР9- Разработка программы расчета НЦФ дифференцирования)
(!!!КР10- Оценка возможностей усечения операторов НЦФ, умноженных на весовые функции).