

6.Сущьность универсального метода. Технологическая схема. Содержание процессов и используемые приборы.
Универсальный метод СТС основан на восстановление в камеральных условиях на специальных универсальных приборах картины аналогичной моменту фотографирования местности
При универсальном методе все процессы по созданию топографической карты выполняются на одном высокоточном оптико-механическом приборе. На универсальных приборах сгущается опорная сеть, трансформируется аэрофотоизображение. Результатом обработки является графический план, который автоматически строится на графопостроителе. Дешифрирование ситуации производится комбинированным методом.
Пусть некоторый
участок местности сфотографирован на
двух снимках, полученных их точек
проекции из S1 и S2.
Точка А отобразилась на двух а\сн. С
помощью двух световых проектирующих
лучей. Засечка осуществилась с
пространственного базиса фотографирования
S1-S2=Вф.
Эту засечку можно востановить на
универсальных приборах. Для этого в
проектирующие камеры унив. Прибора
закладываются два а\сн. А\сн изготавливаются
на стекле или на пленке(диапозитив).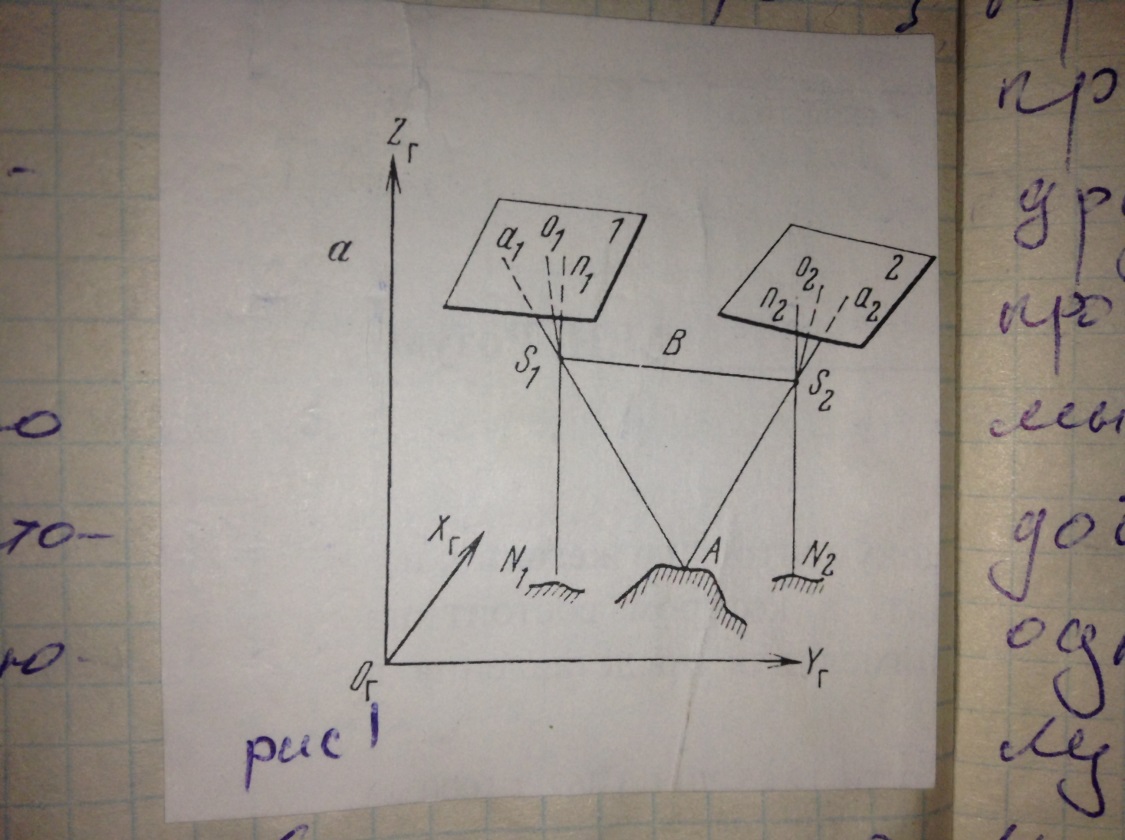
От каждой точки снимка S1’ S2’ пройдет световой проектирующий луч изменяя положение проектирующих камер прибора относит друг друга и относительно пространственной системы координат можно добиться пересечения одноименных проектирующих лучей в точке А’.
Таким образом, ГММ –
точки пересечения одноименных
проектирующих лучей. Расположение ГММ
в пространстве будет строго соответствовать
фотографируемой местности.
7.Гмм: подобная и преобразованная. Свойства моделей и их масштабы.
Подобная ГММ
Если эл-ты внутреннего ориентирования проектирующих камер универсальных приборов равны элементам съемочной АФА, то в универсальным прибором восстанавливается связка проектирующих лучей подобная съемочной.
Рассмотрим рисунок на котором показан момент съемки участка местности АКА снятый с центров проекции S1 и S2=Bф с fК-АФА. Закладываем снимки в прибор проектирующей камеры с центрами проекции S1’ и S2’ и FП=fK, Bф не равен BПР. Приводим проектирующие камеры прибора как и у съемочной в момент фотографирования, в этом случае строится ГММ подобная местности, но уменьшенная по сравнению с местностью. Масштаб восстановленной может быть различен от величины базиса проектирования
Свойства:
ГММ реально существует и подобно самой местности
Масштаб ГММ можно менять изменяя BПР
МГ=MB
ГММ можно измерять в пространственной системе координат с высокой точностью
Проектируя результаты измерений модели на экран прибора получают план местности
Масштаб ГММ не зависит от высоты фотографирования и fК , а так же от углов наклона а\сн
Во сколько раз изменяется МГ во столько же изменится Мв
Преобразованная ГММ
Если FК
проектирующей камеры прибора не
равно fК? то связка
проектирующих лучей в камере универсального
прибора оказывается преобразованной
по сравнению со съемочной. Рассмотрим
случай когда снимки и базис горизонтальны.
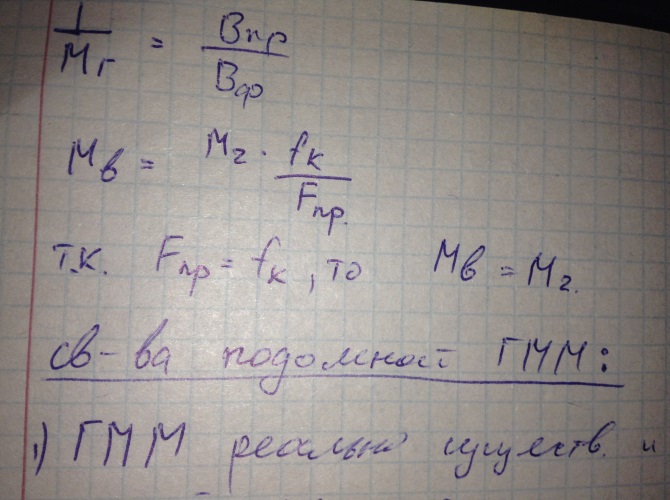
Из чертежа видно, что проекции отрезков О1О2 и О1’О2’ на горизонтальную плоскость равны. Вф=ВПР=>1\МF и 1\MГ – не меняется.
Н1 и Н2 – высоты проектирования а\сн при построении модели подобна местности.
Н1’ и Н2’ –высоты проектируемых а\сн при построении преобразованной модели
.
Свойства:
МВ преобразованной ГММ будет меняться в зависимости от FПР, т.к. по условию FПР не равно fК
Если FПР> fК , то МВ > Мг в Каффин раз.
Тоже самое только <
Модель вытянута вертикально
Модель сжата
Модель местности изменяется в пространственной системе координат и реально существует