

1.Продольный параллакс. Причина его возникновения. Чертеж, вывод и анализ формулы. Практическое использование.
Продольный параллакс – это разность абцисс одноименной точки, измеренной на левом и правом снимках. (Чертеж) Спроецируем т.АиВ на горизонтальном снимке и базис фотографирования точки горизонталей. Начало координат возьмём в главных точках. Для т.а: Хлева=ОлАл; Хпра=ОпрАпр. Для т.с: Хлевс=ОлСл; Хпрс=ОпрСпр. SлОл=SпрОпр=fk => АпрАл’=Ра. Выведем геометрический смысл продольного параллакса: треугольник SлевSпрА подобен АпрSпрАлев’: АпАл’/Вф=SпОп/Нфа => Ра/Вф=fk/Нфа => Ра=Вф*fk/Нфа.
Анализ формулы:
продольные параллаксы точек равны если они лежат в одной горизонтальной плоскости.
продольный параллакс зависит от рельефа, чем больше отметка тем он больше.
Р - величина всегда положительная так как fk и Bф положительны.
Р - не может быть равна нулю т.к. Вф не равно нулю.
2.Поперечный параллакс. Причина его возникновения. Практическое использование при выполнении фотограмметрических работ.
Поперечным параллаксом точки называется разность ординат данной точки на левом и правом снимках стереопары.
Поперечный параллакс – qa=Ула-Упра. ПП от рельефа местности не зависит.
Причины возниновения:
1)Из-за разности высот фотографирования, т.к масштабы снимков будут разные и ординаты одноименной точки тоже не будут равны между собой
2) На горизонтальных снимках когда АльфаХлев = АльфаХпр; Wл=Wп; аел=аепр; и угол наклона базиса = 0, а отсутствует т.к базисные линии будут // между собой и ординаты одноименных точек будут равны => q=0. 3)Если хотябы один из снимков наклонить,то q не = 0. Зная зависимость между элементами взаимного ориентирования и q можно вычислить элементы ВО по измеренным на стерео кампараторах ПП.
3. Элементы взаимного ориентирования аэрофотоснимка в базисной системе.
В этой системе положение двух снимков определяется относительно неподвижного базиса, причем он занимает горизонтальное положение.
ТЛ – продольный угол наклона левого снимка. Показывает наклон снимка вдоль оси Х. Составлен оптической осью левого снимка и перпендикуляром к линии базиса.
ТП – продольный угол наклона правого снимка. Показывает наклон снимка вдоль оси Х. Составлен оптической осью правого снимка и перпендикуляром к линии базиса.
Е – Взаимный поперечный угол наклона. Составлен двумя базисными плоскостями левого и правого снимков. Это двухгранный угол, который измеряется линейным углом.
ᴂ - Поворот левого снимка в своей плоскости. Составлен осью абсцисс и следом сечения плоскости снимка левой базисной плоскостью.
Применяется про ориентировании одной стереопары!!!
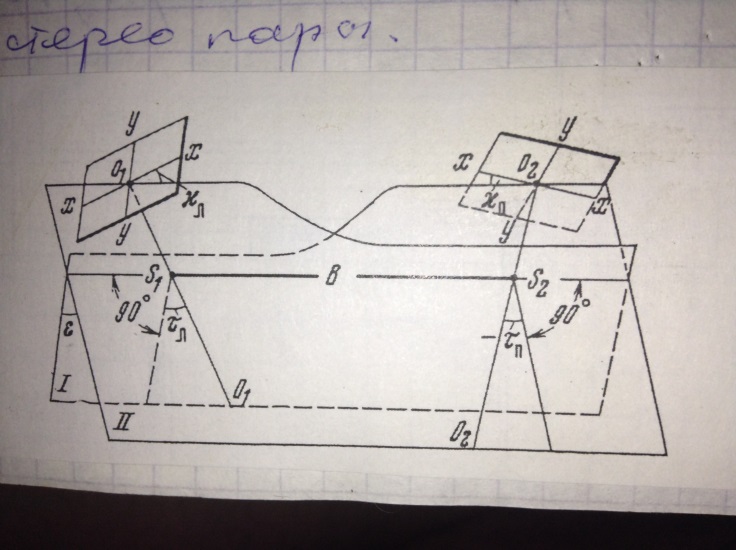
Используется при взаимном ориентировании на универсальных приборах; зная элементы внешнего ориентирования первого снимка и взаимного ориентирования можно вычислить по формулам элементы внешнего ориентирования всех снимков маршрута. Базисная система –это величины которые определяют положение 2х снимков, относительно неподвижного базиса. (пять величин: Тл,Тп,Е,аел,аепр) Для постр.ГММ на универсальном приборе необходимо а/сн привести в такое положение какое они занимали момент фотографирования. Для этого нужно на 6 точках устранить поперечные параллаксы (нахождение эл-ов взаим.ориент.2х снимков, показать рисунок)
1)Базисная:
а)штурвалами х;у наводим левую марочку на хорошо читаемый объект в области перекрестия,правую на аепр. б)перенесем ху на т.2,правую марочку наводим на хорошо читаемый контур,на т3 и т5 устраняем ПП(альфапр+гамма пр/2) т3 вращаем внутрь или наружу, т5 вверх вниз.на т4 устраняется ПП альфой левой, (правую марку совмещ.с хорошо читаемым контуром ху,а левую ведем напротив альфа пр) Альфа лев + ножной штурвал.Если на т6 есть оста. ПП то вводиться дицентрация(по табл).