

Лекции 7 сем
8. Створные способы и методы измерений. Струнный, струнно-оптический, оптический методы.
Контроль прямолинейности, соосности и расположения узлов технологического оборудования промышленных предприятий и других крупных технических объектов имеет специфические особенности среди других видов контроля геометрических параметров.
Контроль прямолинейности наиболее часто назначают при монтаже, ремонтах или реконструкции для следующих видов оборудования:
- прокатных станов;
- прямолинейных конвейеров для перемещения сыпучих материалов;
- конвейерных линий сборочных цехов машиностроительных заводов;
- направляющих станков для изготовления крупногабаритных деталей;
- сложных фундаментов или опорных строительных конструкций зданий и сооружений под технологическое оборудование и т. п.
Соосность контролируют у роторов турбоагрегатов тепловых и атомных электростанций, насосов большой мощности, обечаек и цилиндров вращающихся цементных печей и т.п.
Расположение узлов и деталей контролируют у большинства видов технологического оборудования. Это контроль взаимного положения опорных фундаментных плит, углов поворота и деталей направляющих путей машин, станков и агрегатов и т. п.
Для указанных выше технических объектов применяют, как правило, сплошной, пассивный, летучий контроль. Технологические и эксплуатационные допуски на прямолинейность и соосность задаются для перечисленных объектов инструкциями на монтаж и эксплуатацию.
Контрольными точками при измерениях, как правило, служат характерные точки самого оборудования – боковые поверхности направляющих путей, шейки валов, горизонтальные разъемы, отверстия и т.п. Исходными опорными точками служат знаки закрепления монтажных осей, а часто базовые линии задаются прибором по одной из выставленной в проектное положение детали или узлу.
Створные измерения являются также самыми распространенными способами определения горизонтальных смещений сооружения прямолинейных плотин благодаря своим достоинствам: простоте и быстроте полевых работ, малым затратам на камеральную обработку. Они могут применяться самостоятельно, если опорные пункты створа неподвижны; либо совместно в сочетании с другими методами, если неподвижность опорных пунктов створа не может быть обеспечена по грунтовым или иным условиям и воздействиям.
Створом [135] принято называть вертикальную плоскость, в которой располагается прямая линия, проходящая через два опорных пункта. Опорные пункты фиксируют основные или смещенные оси сооружений, монтажные оси или базовые направления. Один из пунктов, например А (рис. 4.3.7), принимают за начальный, второй – т. е. пункт В, принимают за конечный.
О тклонением
от створа (в обиходе – нестворностью)
называют длину перпендикуляра, опущенного
из какой-либо точки на створную линию.
тклонением
от створа (в обиходе – нестворностью)
называют длину перпендикуляра, опущенного
из какой-либо точки на створную линию.
Рис. 4.3.7. Схема расположения пунктов и измерения нестворностей
Если нестворности определяются не с начального, а с конечного пункта, то знаки их меняются на противоположные.
В практике геодезических работ по контролю прямолинейности наибольшее распространение получили механические, оптические-визирные, лучевые (в том числе, лазерные) и интерференционные методы измерений. Причем, использование конкретных методов, как правило, определяется типами технических объектов, видом геометрического параметра, требуемой точностью контроля и условиями измерений.
В механических методах измерений применяют механические средства измерений и специальную оснастку .
При контроле отклонений от прямолинейности, соосности и других видов позиционных отклонений [192] в качестве базовых (опорных) осей и направлений применяют струны, проволоку и др.
Для задания базового направления при контроле отклонений от прямолинейности, соосности в процессе установки оборудования в проектное положение в процессе монтажа или ремонта, а также для выноса в натуру строительно-монтажных и технологических осей широко применяют струны. В сртунном методе натянутую струну подвешивают в двух базовых точках, ее ось проектируют на осевые риски монтируемого оборудования с помощью отвесов, которые крепятся к струне в нужных местах. Для исключения погрешностей, возникающих из-за неоднозначности крепления отвесов, применяют один отвес, перемещаемый вдоль струны. Погрешности при предварительной выверке оборудования с применением струны и визуальном контроле его положения по меткам не менее 2 – 5 мм.
Основные источники ошибок: провисание струны, ее колебания и остаточные искривления, погрешности отсчетов и положения струны. Колебания струны от движения воздуха не позволяют применять данный метод на больших открытых пространствах. В закрытых помещениях колебания струны меньше, и точность измерений может быть существенно повышена. Для повышения точности в струнно-оптическом методе измерений применяют оптические, способы отсчета положения элементов конструкций и оборудования относительно струны.
О тсчет
оптическим методом с помощью микроскопа
применяют для контроля
отклонения направляющих от прямолинейности.
При установке
машин
и механизмов
в процессе ремонта в проектное положение
струну натягивают на значительных
расстояниях от выверяемых узлов, поэтому
вместо микроскопа чаще используют
специальные оптические центрирующие
приборы (ОЦП) (рис. 4.7.1), а также ординатомеры.
При этом струну располагают так, чтобы
в крайних положениях прибора ее
изображение совпадало с перекрестием
сетки нитей зрительной трубы. При
перемещении вдоль струны оптические
приборы из-за ее провисания приходится
фокусировать вновь, что вносит добавочные
погрешности. Чтобы уменьшить стрелу
провисания, иногда применяют поплавки,
поддерживающие струну; более простым
способом является применение подвесок
(рис. 4.7.2).
тсчет
оптическим методом с помощью микроскопа
применяют для контроля
отклонения направляющих от прямолинейности.
При установке
машин
и механизмов
в процессе ремонта в проектное положение
струну натягивают на значительных
расстояниях от выверяемых узлов, поэтому
вместо микроскопа чаще используют
специальные оптические центрирующие
приборы (ОЦП) (рис. 4.7.1), а также ординатомеры.
При этом струну располагают так, чтобы
в крайних положениях прибора ее
изображение совпадало с перекрестием
сетки нитей зрительной трубы. При
перемещении вдоль струны оптические
приборы из-за ее провисания приходится
фокусировать вновь, что вносит добавочные
погрешности. Чтобы уменьшить стрелу
провисания, иногда применяют поплавки,
поддерживающие струну; более простым
способом является применение подвесок
(рис. 4.7.2).
Для автоматизации процесса контроля часто используют индуктивные, емкостные, фотоэлектрические и другие преобразователи перемещений (датчики). Расширения диапазона измерений датчиками достигают их перемещением с помощью микрометрических винтов.
Механические струнные методы измерений наибольшее распространение нашли при контроле прямолинейности в закрытых помещениях (без воздушных токов) направляющих путей, конвейеров и других изделий аналогичного типа в процессе их капитального ремонта.
В оптических методах измерений в качестве базовой (опорной) линии используют визирную ось оптического прибора (теодолита, телескопа, алиниометра и т. п.).
Среди оптических методов различают: визирный, коллимации, автоколлимации, дифракционные и др. В визирном методе створных измерений створ задается коллимационной плоскостью оптических приборов – теодолитов или алиниометров. При установке оптических приборов на одном из опорных пунктов створа и визировании на другой опорный пункт их коллимационная плоскость совмещается со створной плоскостью.
Нестворности могут измеряться непосредственно, например, с помощью подвижных марок различной конструкции и точности, или косвенно, когда нестворность вычисляется как функция малого угла.
Способ подвижной марки предпочтителен при небольших линиях визирования (до 50 м), когда связь наблюдателя с помощником, работающим с подвижной маркой, легко осуществляется голосом или условными знаками. В остальных случаях предпочтителен способ малых углов.
Подвижная марка (рис. 4.3.10, а) имеет уровень 6 для приведения ее в рабочее положение, визирное приспособление 5 для установки плоскости экрана 3 перпендикулярно визирному лучу, неподвижное 1 и подвижное 2 основания. Неподвижное основание жестко скреплено с вкладышем 7, устанавливаемым при измерениях в гнездовой центр или трегер 11. Подвижное основание 2 жестко скреплено с экраном 3, на котором располагается визирная цель 4 подвижной марки и перемещается поперек створа с помощью винта 9. Положение визирной цели при установке ее в створ фиксируется с помощью нониуса 8 по неподвижной шкале 10.
а) б)
5
 5
5
3 3
2
9
1 1 1
10
7 11 11 7
12 12
Рис. 4.3.10. Визирные марки:
а) подвижная; б) неподвижная
При определении нестворности подвижная марка устанавливается на контрольном пункте, и ось симметрии ее визирной цели совмещается с осью симметрии биссектора сетки нитей зрительной трубы теодолита за счет перемещения экрана марки микрометренным винтом. Величина нестворности Li определяется с помощью шкалы относительно оси вкладыша.
Неподвижная марка фиксирует положение оси гнездового центра в плоскости перпендикулярной визирной линии. Неподвижная визирная марка (рис. 4.3.10, б) состоит из неподвижного основания 1, жестко скрепленного с вкладышем 7 и экраном 3. Приведение в рабочее положение вертикальной оси марки осуществляется подъемными винтами 12 трегера 11 по уровню 6. Установка перпендикулярно линии визирования осуществляется разворотом экрана с визирной целью 4 по визирному приспособлению 5.
Перед измерением нестворностей определяют место нуля (МО) подвижной марки. Под МО понимается отсчет по шкале или микрометренному винту марки в положении, когда ось визирной цели марки совпадает по вертикали с осью гнездового центра. При определении МО марку для уменьшения ошибки визирования рекомендуется устанавливать ближе к теодолиту.
Величина места нуля определяется по формуле
![]() ,
(4.3.5)
,
(4.3.5)
где
![]() и
и
![]() – отсчеты по шкале (микрометренному
винту) марки при положении микрометренного
винта слева и справа (по отношению к
наблюдателю) от визирной цели.
– отсчеты по шкале (микрометренному
винту) марки при положении микрометренного
винта слева и справа (по отношению к
наблюдателю) от визирной цели.
При определении
МО прозрачный экран подвижной марки
разворачивается на
![]() ,
т. е. в одном случае марка обращена к
прибору лицевой стороной,
а во втором
– обратной (тыльной) стороной.
,
т. е. в одном случае марка обращена к
прибору лицевой стороной,
а во втором
– обратной (тыльной) стороной.
При определении МО визирная цель марки t раз вводится в биссектор сетки нитей при обоих положениях микрометренного винта. За окончательное значение МО принимается среднее
![]() ,
(4.3.6)
,
(4.3.6)
где величина МО вычисляется по формуле (4.3.5).
Оценка точности
полученного значения
![]() выполняется по формуле:
выполняется по формуле:
![]() ,
(4.3.7)
,
(4.3.7)
где М – средняя квадратическая погрешность места нуля подвижной марки.
(Примечание. Место нуля подвижной марки с непрозрачным экраном определяется по специальному вкладышу, установленному в гнездовой центр или по неподвижной марке, с помощью которой можно зафиксировать положение центра знака.)
Формула определения нестворности с использованием МО подвижной марки зависит от расположения и оцифровки шкалы. Так, в соответствии с принятой системой координат нестворность точки С (см. рис. 4.3.7) положительная, поэтому если при введении визирной цели в биссектор сетки нитей отсчет по шкале будет меньше МО, то
![]() ,
(4.3.8)
,
(4.3.8)
и наоборот
![]() .
(4.3.9)
.
(4.3.9)
Малым углом называют угол, значение которого меньше наименьшего деления лимба теодолита. Поэтому малый угол может быть измерен окулярным или оптическим микрометром с более высокой точностью, чем обычные углы, так как не будет ошибок делений лимба.
Сущность
измерения малого угла микрометрами
заключается в следующем. Используя
подвижный биссектор окулярного
микрометра, производят измерения угла
между изображениями неподвижных марок,
расположенных приблизительно в одном
створе, в делениях барабана. При цене
деления
![]() барабана расстояние между марками
(нестворность) в угловой мере получится
по формуле
барабана расстояние между марками
(нестворность) в угловой мере получится
по формуле
![]() ,
(4.3.10)
,
(4.3.10)
где
![]() – отсчеты по барабану.
– отсчеты по барабану.
Величину нестворности можно определить по формуле
![]()
![]() ,
(4.3.11)
,
(4.3.11)
где S – расстояние от прибора до ближайшей марки.
Высокоточные приборы с окулярными микрометрами, применяемые в России и за рубежом, позволяют измерять малые углы со средней квадратической погрешностью 0,2 – 0,5 угловых секунд (из 9 – 12 приемов). При измерении малых углов приборами с оптическими микрометрами наведение трубы на цель производится наводящим винтом алидады. В этом случае число приемов следует увеличивать в полтора раза от числа, рассчитанного для окулярного микрометра.
Так как ошибка центрирования должна быть в несколько раз меньше ошибки определения отклонений, закреплять точки целесообразно гнездовыми центрами, иногда сложной конструкции. Точность центрирования, зависящая от точности изготовления и установки втулки гнездового знака и вкладыша марки или прибора, может колебаться от 0,1 мм (использование трегеров геодезических приборов) до 0,005 мм (использование гнездового центра Н.Н. Лебедева).
9. Коллиматорный и дифракционный методы. Применение микротелескопов, створофиксаторов, лазерных и других приборов при выверке конструкций и оборудования
В коллиматорном методе оптических измерений (рис. 4.7.13) зрительной трубой 2 визируют на другую трубу 3 (коллиматор), задающую базовую линию в виде своей оптической оси [134, 176, 192, 243]. Для этого сетка нитей коллиматора, которым может служить обычная визирная труба, подсвечивается.
Коллиматор 3 представляет собой прибор для получения параллельного пучка лучей (рис. 4.7.13). У коллиматора в фокальной плоскости объектива находится сетка нитей 4, освещаемая источником света. В этом случае изображение сетки, создаваемое объективом коллиматора, мнимое и находится в бесконечности. Зрительная (визирная) труба соответственно должна быть сфокусирована на бесконечность. При этом исключены погрешности из-за перефокусировки зрительной трубы. Смещения изображения сетки коллиматора в плоскости сетки визирной трубы будут наблюдаться только при угловых смещениях их осей.
Метод коллимации является косвенным шаговым методом измерения линейных величин. При измерениях отклонений от прямолинейности или плоскостности коллиматор перемещают в направлении визирной оси трубы. Между измерениями коллиматор перемещают на шаг, равный базе b (рис. 4.7.13), (обычно b = fK – фокусному расстоянию коллиматора). Если смежные точки контролируемой поверхности имеют отклонение у, то в каждом новом положении коллиматора его визирная ось образует с визирной осью трубы угол . Отклонение y = btg., а по малости угла Θ можно записать
![]()
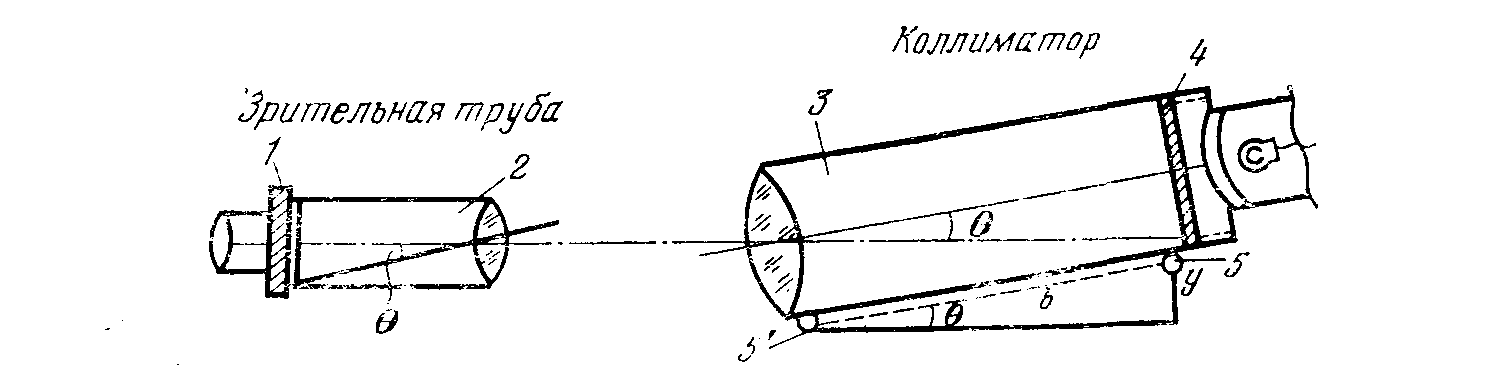
Рис. 4.7.13. Коллиматорный метод измерений
При контроле отклонений от прямолинейности направляющих зрительную трубу с окулярным микрометром устанавливают в центре знака, закрепляющего монтажную ось. На другом конце устанавливают визирную марку. Окулярный микрометр ставят на нуль, и трубу наводят на марку. На ближайшей к инструменту секции на тележке, касающейся точками контактирования выверяемой поверхности, устанавливают коллиматор и совмещают при помощи окулярного микрометра изображение штрихов сетки коллиматора с сеткой нитей зрительной трубы. Взяв отсчет по окулярному микрометру, определяют сначала малый угол , а затем вычисляют величину отклонения этого участка от створа оси.
Передвигая коллиматор вперед, чтобы на место передней точки касания установилась задняя, как и ранее, совмещают сетки и определяют отклонения на последующих участках.
Основное достоинство коллиматорного метода измерений заключается в том, что точность измерения отклонения в принципе не зависит от расстояния до наблюдаемых точек. Однако практически при больших удалениях коллиматора от зрительной трубы ухудшаются условия наблюдений и увеличивается ошибка измерения угла отклонения , вследствие чего несколько снижается точность метода.
Исследования показывают, что в благоприятных условиях видимости при расстоянии до 400 м средняя квадратическая погрешность измерения угла одним приемом составляет примерно 0,7 – 1,0", а среднего из трех-четырех приемов – 0,5", что при базе b = 2 000 мм дает ошибку определения смещения у около 5 мкм.
Дифракционные и интерференционные методы контроля при выверке оборудования [134, 176, 192, 243]. Высокую точность, сочетающуюся с максимальной простотой аппаратуры для измерений отклонений от прямолинейности, обеспечивает схема, основанная на явлениях дифракции и интерференции света, излучаемого узкой щелью или малым отверстием, проходящего через экран с двумя узкими параллельными щелями или малыми отверстиями.
Пучок света от точечного источника после прохождения узкой щели d1 марки M1 (рис. 4.7.17) попадает на спектральную двухщелевую марку M2. Вследствие влияния дифракции световые волны, идущие от щелей d2 и d2, заходят в область геометрической тени и при надлежащем выборе ширины щелей и расстояний между ними будут перекрываться между собой. Так как оба пучка являются когерентными, то в результате их взаимодействия в плоскости экрана возникнет интерференционная картина, которая рассматривается наблюдателем.
Рис. 4.7.17. Схема дифракционного метода измерений
Первой из трех точек системы, определяющей створ, является однощелевая марка с вертикальной щелью. Второй точкой системы является точка пересечения плоскости двухщелевой марки с осью симметрии. Третья точка для створных измерений задается экраном с биссектором (приемник света с сеткой нитей).
Совместив центральную полосу картины интерференции с осью биссектора экрана путем перемещения двухщелевой марки в направлении, перпендикулярном заданному створу, располагают все три точки в одной вертикальной плоскости. Величина перемещения двухщелевой марки и определяет нестворность контролируемой точки.
В комплект дифракционного прибора, разработанного МИИГАиК, входят осветитель, марка с одиночной щелью, марка с двумя щелями и приемник дифракционного света в виде лупы с сеткой нитей.
Ширину щелей спектральной марки и расстояние между ними рассчитывают в зависимости от желаемой ширины интерференционных полос, их числа, дальности наблюдений.
Дифракционный метод измерений обеспечивает высокую точность контроля отклонений от прямолинейности (погрешность 20 – 30 мкм при длине створа до 100 м).
Микротелескопами называют высокоточные оптические приборы, имеющие телескопическую систему и микроскоп вместо окуляра. Микротелескопы применяют при монтаже преимущественно для контроля отклонений от прямолинейности, соосности и перпендикулярности осей и плоскостей машин и механизмов.
Алиниометры не имеют горизонтального и вертикального кругов, снабжены зрительной трубой большого увеличения, накладным уровнем, а также окулярным или оптическим микрометром..
Методы автоколлимации и авторефлексии. Автоколлимацией называется получение изображения, образованного пучками параллельных лучей, вышедших из автоколлимационной трубы 1 и отраженных плоским зеркалом 2 или другим отражателем (прямоугольным двойным и тройным зеркалами, рис. 4.7.15). Поворот зеркала вызывает отклонение отраженного пучка лучей на двойной угол, вследствие чего в фокальной плоскости трубы образуется смещение автоколлимационного изображения.
Если зеркало перпендикулярно оптической оси объектива, то изображение совпадает с перекрестием. При наклоне зеркала на угол изображение смещается на величину = 2faktg (рис. 4.7.15). Для определения величины а, а следовательно, и угла наклона зеркала автоколлиматор обычно снабжают окулярным микрометром.
Метод автоколлимации применяют в прецизионном машиностроении, инженерной геодезии и при монтаже для контроля отклонений от прямолинейности и параллельности направляющих, перпендикулярности вертикальных плоскостей, взаимного расположения узлов оборудования и отдельных агрегатов. Схемы некоторых способов применения этого метода оптических измерений приведены в [192].
Рис. 4.3.15. Схемы применения метода
автоколлимации
2
1
b![]()










































![]()
Современные автоколлиматоры изготовляют с визуальным и фотоэлектрическим отсчетом (АФ-1 и АФ-2), а также с автоматической установкой и отсчетом.
Д ля
измерений методом автоколлимации с
визуальным отсчетом применяют
также и
другие оптические приборы общего и
специального назначения,
оснащенные
соответствующими приспособлениями
(зеркальными марками и
автоколлимационным
окуляром). К таким приборам относят
вышеописанные трубы ППС-11, ППС-12,
стапельный визир ВС-2 (ИГ-96) и др.
Отечественная промышленность выпускает
также автоколлимационные теодолиты
2Т2А, 3Т2КА,
Т5А и др.
ля
измерений методом автоколлимации с
визуальным отсчетом применяют
также и
другие оптические приборы общего и
специального назначения,
оснащенные
соответствующими приспособлениями
(зеркальными марками и
автоколлимационным
окуляром). К таким приборам относят
вышеописанные трубы ППС-11, ППС-12,
стапельный визир ВС-2 (ИГ-96) и др.
Отечественная промышленность выпускает
также автоколлимационные теодолиты
2Т2А, 3Т2КА,
Т5А и др.
Среди лазерных средств контроля различают системы задания направления, створных измерений, нивелирования, контроля отклонений от прямолинейности, соосности, плоскостности и перпендикулярности, измерения углов, а также универсальные системы.
Большинство простейших лазерных измерительных систем создано на базе традиционных оптических приборов, в основном, геодезических. Число лазерных геодезических приборов, применяемых при контроле монтажа технологического оборудования, трубопроводов и конструкций, непрерывно возрастает во всех странах.
Современные специализированные лазерные измерительные системы для контроля геометрических параметров представляют собой оптико-электронные устройства, состоящие из ряда типовых блоков и специальной установочной оснастки для базирования приборов.
Лазерные геодезические приборы, применяемые при монтаже и контроле строительных конструкций, машин и агрегатов в зависимости от вида геодезических работ, выполняемых с их применением, делят нa четыре группы: визиры, приборы вертикального проектирования, нивелиры и теодолиты.
Лазерными визирами называют приборы, позволяющие задавать оптическим лучом определенное направление в пространстве – опорную линию (реперную ось), относительно которой производят необходимые измерения.
Лазерные нивелиры и лазерные теодолиты получили большое распространение для контроля прямолинейности и плоскостности строительных конструкций и некоторых видов технологического оборудования.
Лазерные приборы вертикального проектирования и отвесы могут также использоваться для контроля прямолинейности вертикальных строительных конструкций, вертикальных направляющих путей, машин и агрегатов с продольной вертикальной осью. Большинство отечественных лазерных приборов вертикального проектирования создано на основе других лазерных приборов, снабженных призменными насадками или системой зеркал для изменения горизонтального направления лазерного пучка на вертикальное.
10. Схемы (программы) створных измерений – целого створа, полуствора, четвертьствора.
В зависимости от размеров и конструктивных решений сооружений, наличия приборов, необходимой точности контроля перемещений, створные измерения выполняются по определенным схемам построения створных линий (в некоторых изданиях – программам), под которыми понимают определенную последовательность действий. В практике высокоточных створных измерений наибольшее применение находят схемы полного створа, общего створа, полуствора, четвертьствора, последовательных створов, малых створов, малых створов и полигонометрического хода и др.
В схеме полного створа (рис. 4.3.11) нестворность q каждой точки относительно общего створа определяется в прямом и обратном направлениях, т. е. дважды (при постановке прибора на обоих концах створа).
Р ис.
4.3.11. Схема полного створа
ис.
4.3.11. Схема полного створа
Программа наблюдений состоит в измерении нестворности в каждой точке при круге право и круге лево в ходах прямого и обратного направлений. Наблюдения при двух кругах производят с целью исключения возможного эксцентриситета в положении визирной оси створного прибора относительно его основной оси вращения и уменьшения влияния ошибки фокусирования зрительной трубы.
Величину нестворности q любой точки, например точки i, определяют по формуле
 ,
(4.3.12)
,
(4.3.12)
где
![]() – величина нестворности, измеренная с
точки А;
– величина нестворности, измеренная с
точки А;
![]() – величина
нестворности, измеренная с точки В;
– величина
нестворности, измеренная с точки В;
![]() – веса измерений.
– веса измерений.
Среднюю квадратическую погрешность (СКП) средневесового результата отклонения из прямого и обратного ходов определяют по формуле:
 ,
(4.3.13)
,
(4.3.13)
где
![]() – СКП определения нестворности из
прямого хода;
– СКП определения нестворности из
прямого хода;
![]() – СКП определения
нестворности из обратного хода.
– СКП определения
нестворности из обратного хода.
Величины
![]() вычисляются по формулам:
вычисляются по формулам:
‑ для способа малых углов:

(4.3.14)
где
![]() и
и
![]() – СКП измерения малого угла соответственно
с точки А и точки В, вычисляемые по
формуле погрешности среднего
арифметического из n
приемов
– СКП измерения малого угла соответственно
с точки А и точки В, вычисляемые по
формуле погрешности среднего
арифметического из n
приемов
![]() ;
(4.3.15)
;
(4.3.15)
‑
(4.3.16)
![]()

![]()
где
![]() – угловая СКП ориентирования створа,
т. е. погрешность визирования на
неподвижную марку,
– угловая СКП ориентирования створа,
т. е. погрешность визирования на
неподвижную марку,
![]() – угловая СКП
введения подвижной марки в створ,
– угловая СКП
введения подвижной марки в створ,
![]() – угловая величина
ошибки проектирования.
– угловая величина
ошибки проектирования.
Однако более достоверное значение погрешностей определения отклонений контрольных пунктов можно получить по разностям отклонений, полученных из прямого и обратного ходов
![]() ,
(4.3.17)
,
(4.3.17)
где
![]() ;
;
![]() – число разностей, при этом знак
– число разностей, при этом знак
![]() меняется на обратный.
меняется на обратный.
К положительным сторонам программы полного створа измерений следует отнести относительную быстроту измерений, так как прибор переносят лишь один раз с одного опорного пункта на другой, и простоту обработки результатов измерений.
К недостаткам программы следует отнести:
- необходимость постоянной видимости по всему створу;
- низкую точность измерения отклонений при больших линиях визирования, что заставляет часто делать много приемов измерений;
- очень низкую точность взаимного положения соседних контрольных знаков, особенно в центральной области створа, так как отклонения каждого знака определяются независимо относительно общего створа.
Последнее обстоятельство является самым уязвимым местом при назначении данной программы измерений, так как допуски на взаимное положение контрольных знаков всегда меньше допусков на абсолютные перемещения.
Поэтому данную программу применяют при небольших створах, когда достичь заданную точность контроля можно не производя большого объема работ.
Для уменьшения влияния погрешностей визирования, которые прямо пропорциональны расстоянию, М.С. Муравьев на Цимлянском гидроузле предложил разбивать створ АВ на «полустворы» и «четвертьстворы».
При измерениях по программе полустворов работу начинают с определения нестворности центральной точки 4 (рис. 4.3.13) из прямого и обратного ходов относительно створа А-В. Затем определяют нестворности точек 1, 2, 3 относительно полуствора А-4 и нестворности точек 5, 6, 7 относительно полуствора 4-В.
Р ис.
4.3.13. Схема полуствора
ис.
4.3.13. Схема полуствора
Величину нестворности любой промежуточной точки, например 2, в схеме полуствора (рис. 4.3.13) определяют по формуле:
![]() ,
(4.3.20)
,
(4.3.20)
где
![]() – величина нестворности точки 2
относительно полного створа;
– величина нестворности точки 2
относительно полного створа;
![]() – величина
нестворности точки 2 относительно
полуствора А-4, определяемая по формуле
(4.3.13);
– величина
нестворности точки 2 относительно
полуствора А-4, определяемая по формуле
(4.3.13);
![]() .
(4.3.21)
.
(4.3.21)
Оценка точности определения нестворности точки в программе полуствора производится по формуле
![]() ,
(4.3.22)
,
(4.3.22)
где
![]() – СКП определения нестворности точки
2 относительно полного створа А-В;
– СКП определения нестворности точки
2 относительно полного створа А-В;
![]() – СКП определения
нестворности точки 2 относительно
полуствора А-4, вычисляемая по формуле
(4.3.13);
– СКП определения
нестворности точки 2 относительно
полуствора А-4, вычисляемая по формуле
(4.3.13);
![]() – расстояния между
точками, указанными в литерах.
– расстояния между
точками, указанными в литерах.
В рассмотренной программе увеличивается объем работы, связанный с дополнительными переносами прибора и увеличением числа измеряемых нестворностей, а также дополнительными вычислениями. Однако точность взаимного положения точек будет выше, чем в программе полного створа, что очень важно при контроле смещений сооружений и их частей.
В программе четвертьствора, как и в программе полуствора, сначала определяют величину нестворности центральной точки 4 (рис. 4.3.14) из прямого и обратного ходов относительно створа А-В. Затем по аналогичной программе определяют величины нестворностей центральных точек соответственно 2 и 6 относительно полустворов А-4 и В-4; затем определяют величины нестворностей промежуточных точек относительно четвертьстворов А-2, 2-4, 4-6, 6-В.

Величину нестворности q любой точки, например 1, в схеме четвертьствора (рис. 4.3.14) определяют по формуле:
![]() ,
(4.3.23)
,
(4.3.23)
где
![]() – величина нестворности точки 1
относительно створа А-В;
– величина нестворности точки 1
относительно створа А-В;
![]() – величина
нестворности точки 1 относительно
четвертьствора А-2, вычисляемая по
формуле (4.3.13);
– величина
нестворности точки 1 относительно
четвертьствора А-2, вычисляемая по
формуле (4.3.13);
![]() ,
(4.3.24)
,
(4.3.24)
![]() .
(4.3.25)
.
(4.3.25)
Величину смещения определяют как разность нестворностей последующего и первого циклов измерений.
Оценку точности величины нестворности производят по формуле
![]() ,
(4.3.26)
,
(4.3.26)
где
![]() –
СКП определения величины нестворности
точки 1 относительно четвертьствора
А-2, вычисляемая по формуле (4.3.13);
–
СКП определения величины нестворности
точки 1 относительно четвертьствора
А-2, вычисляемая по формуле (4.3.13);
![]() – СКП определения
величины нестворности точки 2 относительно
полуствора А-4, вычисляемая по формуле
(4.3.22);
– СКП определения
величины нестворности точки 2 относительно
полуствора А-4, вычисляемая по формуле
(4.3.22);
![]() – СКП определения
величины нестворности точки 4 относительно
створа А-В, вычисляемая по формуле
(4.3.13);
– СКП определения
величины нестворности точки 4 относительно
створа А-В, вычисляемая по формуле
(4.3.13);
![]() – расстояния между
точками, указанными в литерах.
– расстояния между
точками, указанными в литерах.
В рассмотренной программе значительно увеличивается объем работы, связанный с дополнительными переносами прибора и увеличением числа измеряемых нестворностей, а также дополнительными вычислениями. Однако точность взаимного положения точек будет выше, чем в программе полуствора и полного створа, что очень важно при контроле смещений сооружений и их частей.