

Введение
Дисциплина "Теория механизмов и машин" (ТММ) относится к циклу обще профессиональных дисциплин.
При изучении курса ТММ студент получает основополагающие сведения о механизмах - об их многообразии, основных типах и о возможности их использования в различных машинах; изучает основные методы анализа и синтеза механизмов, применяемых в разнообразных машинах и устройствах; учится привлекать ЭВМ для рационального проектирования механизмов и оптимизации их параметров.
Этот курс лежит в основе конструкторских разделов большинства специальных дисциплин, освоение которых без знания основ теории механизмов и машин невозможно или затруднительно.
При выполнении курсовой работы студенты учатся самостоятельно и грамотно решать задачи проектирования механизмов.
Задания на курсовую работу для студентов различных специальностей в зависимости от учебной программы содержат те или иные разделы, приведенные в данном методическом указании: кинематический, силовой и геометрический расчет зубчатого механизма; кинематический, силовой и динамический расчет рычажного механизма; синтез кулачкового механизма.
Содержание задания и исходные данные к курсовой работе студент выбирает из [1].
Выполненная курсовая работа содержит графическую и расчетную части. Весь расчетный материал с необходимыми пояснениями, таблицами, результатами расчетов на ЭВМ помещается в пояснительную записку. Оформление записки должно соответствовать требованиям стандарта, предъявляемым к оформлению текстовых документов. Записку выполняют на листах формата А4.
Качество освоения студентом материала проверяется и оценивается при защите курсовой работы. При этом учитываются уровень знаний, качество оформления чертежей и пояснительной записки, а также ритмичность выполнения работы и срок ее завершения.
1.Структурный анализ механизма
Число степеней свободы механизма W определяем по формуле П.Л.Чебышева.
 (1.1)
(1.1)
где  число подвижных звеньев механизма;
число подвижных звеньев механизма;
 число кинематических пар пятого класса;
число кинематических пар пятого класса;
 число кинематичексих пар четвертого
класса;
число кинематичексих пар четвертого
класса;
В исследуемом
механизме
 ,
,
1 – кривошип;
2 – шатун;
3 – ползун;
О – кинематическая пара пятого класса, низшая;
А - кинематическая пара пятого класса, низшая;
В - кинематическая пара пятого класса, низшая;
 -
кинематическая пара пятого класса,
низшая;
-
кинематическая пара пятого класса,
низшая;

Следовательно механизм имеет одно начальное звено и все звенья совершают вполне определенное движение.
Определим класс механизма. Класс механизма определяется высшим классом группы Ассура, входящей в состав механизма . Отделение групп начинаем с самой удаленной от начального звена (кривошипа). Отделяем группу второго класса второго вида со звеньями 2 и 3.
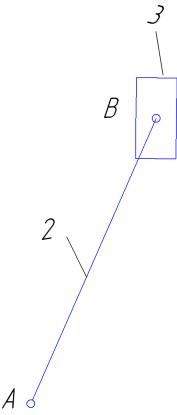
Рисунок 1 – группа Ассура 2-го класса
В результате деления остается механизм первого класса, в состав которого
входит начальное звено 1 и стойка 0
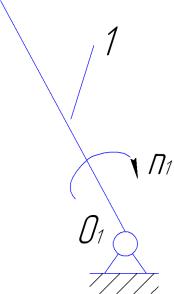
Рисунок 2 - оставшейся механизм
Формула строения механизма имеет вид
![]()
Таким образом , данный механизм относится ко II классу.
2.Метрический синтез и кинематический анализ механизма.
2.1 Метрический синтез механизма.
Определим основные размеры механизма.
Длинна кривошипа 1 будет равна.

Длина шатуна 2

 (мм)
(мм)
2.2. Построение плана положений механизма.
План положений является основой для построения кинематических диаграмм линейного перемещения ползуна , или выходного перемещения выходного
звена . Построение плана положений механизма выполняется в масштабе 1:1
то
масштабный коэффициент длины

 в этом масштабном
в этом масштабном
коэффициенте вычерчивается кинематическая схема механизма . Положение ползуна на направляющей строим методом засечек. За нулевое положение механизма принимаем правое крайнее правое положение точки В ,а вращение кривошипа по часовой стрелки. Начиная от первого положения кривошипа делим траекторию точки А на 12 равных частей и методом засечек находим все остальные положения звеньев механизма.
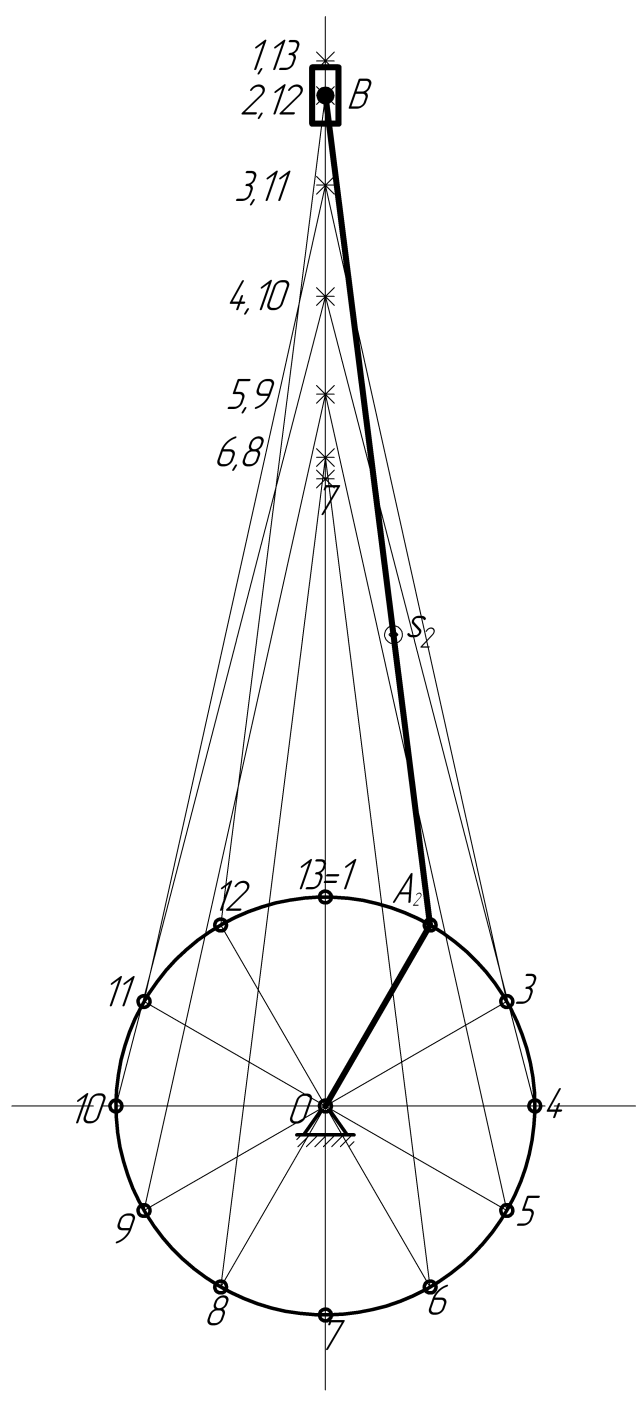
Рисунок 3 – План 12 положений механизма
2.3 Построение планов скоростей.
Определение скоростей , указанных на кинематической схеме точек звеньев
механизма производим методом планов в последовательности , определенной
формулой строения механизма. Вначале определяем линейную скорость ведущей точки А.
 =
=

 (2.1)
(2.1)
где



 частота
вращения начального звена
частота
вращения начального звена
 длина
звена
длина
звена

 =
=
 = 137 (рад/с)
= 137 (рад/с)
 =
8,22 (м/с)
=
8,22 (м/с)
Скорость
точки
 будет одинаковой для всех положений
механизма. Масштабный коэффициент плана
скоростей выбираем стандартным и таким,
чтобы вектор
будет одинаковой для всех положений
механизма. Масштабный коэффициент плана
скоростей выбираем стандартным и таким,
чтобы вектор
 , изображающий скорость точки А , был
длиной не менее
, изображающий скорость точки А , был
длиной не менее
50-
70 мм. Принимаем

 =
=
 =
=


Вектор
перпендикулярен кривошипу
 и направлен в сторону его вращения .
и направлен в сторону его вращения .
Определим
скорость точки
 ,
принадлежащей группе Ассура (2,3).
рассмотрим движение точки В по отношению
к точке
, а затем по отношению к
,
принадлежащей группе Ассура (2,3).
рассмотрим движение точки В по отношению
к точке
, а затем по отношению к
 принадлежащей неподвижному звену.
Запишем векторное уравнение которое
решается графически.
принадлежащей неподвижному звену.
Запишем векторное уравнение которое
решается графически.
Согласно
первому уравнению через точку
 проводим прямую
проводим прямую
перпендикулярную
 , согласно второму уравнению через точку
, согласно второму уравнению через точку
 (т.к.
(т.к.

 )
проводим прямую параллельную направляющей.
Пересечение этих прямых определяет
)
проводим прямую параллельную направляющей.
Пересечение этих прямых определяет
положение
точки
,
изображающей конец вектора
 и
и
 .
Из плана
.
Из плана
скоростей получим:


Скорость центра масс звена 2
 =
=
Скорость точек , принадлежащих группе Асcура со звеньями 2,3 определены.
В указанной последовательности производим построение планов скоростей для всех 12-ти положений механизма. Причем векторы выходящие из полюса изображают абсолютные скорости,а отрезки соединяющие концы этих векторов- относительные скорости точек.
Вычисленные таким образом величины скоростей сводим в таблицу.
Определим угловые скорости звеньев.
 =
=
 =
= = 14,3 (
= 14,3 ( )
)
Направление угловой скорости звена АВ определяем, если перенести вектор
 скорости
точки В относительно точки А параллельно
самому себе в точку В на схеме механизма
и установить направление вращения звена
АВ относительно точке А под действием
этого вектора . В рассматриваемом случае
в положении 2 механизма угловая скорость
против
часовой стрелки
скорости
точки В относительно точки А параллельно
самому себе в точку В на схеме механизма
и установить направление вращения звена
АВ относительно точке А под действием
этого вектора . В рассматриваемом случае
в положении 2 механизма угловая скорость
против
часовой стрелки
Результаты расчетов для 12 положений сводим в таблицы.

Таблицу 2.1 Значения отрезков механизма в мм.
№ |
pb |
ps2 |
ba |
pa |
1 |
50 |
0 |
0 |
50 |
2 |
30 |
37 |
44 |
50 |
3 |
48 |
48 |
26 |
50 |
4 |
50 |
0 |
0 |
50 |
5 |
38 |
45 |
25 |
50 |
6 |
21 |
37 |
44 |
50 |
7 |
50 |
0 |
0 |
50 |
8 |
21 |
37 |
44 |
50 |
9 |
38 |
45 |
26 |
50 |
10 |
50 |
0 |
0 |
50 |
11 |
48 |
48 |
26 |
50 |
12 |
30 |
38 |
44 |
50 |
Таблицу 2.2 Значения скоростей механизма в м/ с.
№ |
VB |
Vs2 |
2, c-1 |
ω2 ,c-1 |
1 |
0 |
5,376 |
5,09 |
27,57 |
2 |
-8.186 |
6,38 |
-1876,73 |
23,93 |
3 |
-13.253 |
7,822 |
-3269,11 |
13,876 |
4 |
-13.785 |
8,172 |
-3786,59 |
0 |
5 |
-10.611 |
7,322 |
-3228,93 |
-13,825 |
6 |
-5.576 |
5,993 |
-1815,06 |
-23,721 |
7 |
0 |
5,319 |
-5,09 |
-27,276 |
8 |
5.565 |
6,002 |
1811,75 |
-23,754 |
9 |
10.574 |
7,342 |
3242,16 |
-13,862 |
10 |
13.735 |
8,2 |
3812,77 |
0 |
11 |
13.225 |
7,842 |
3280,16 |
13,913 |
12 |
8.186 |
6,383 |
1865,91 |
23,942 |